

Kinematika_slozhnogo_dvizhenia_tochki
.pdfАбсолютную скорость точки D определим по формуле плоского движения для диска 1:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
V |
D =VC +VDC |
|
|
|
|
|
(10) |
||||||||||||||||||
и тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(e) |
|
|
|
(r) , |
(11) |
|||||||||||
|
V |
|
=V +V |
=V |
+V |
|||||||||||||||||||||||||||
|
|
|
D |
|
|
C |
|
|
DC |
|
|
|
D |
|
|
D |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
= ω DC, V |
|
= π |
0, 2 = 0,314 м/с, V |
= 0,314 м/с. |
|||||||||||||||||||||||||||
DC |
|
|
|
DC |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
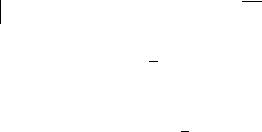
Скорость VC найдена ранее. Известны направления векторов переносной скорости (VD(e) OD) и относительной скорости (ско-
рость VD(r) направлена по OD ) точки D.
На рис. 4 построен многоугольник скоростей по формулам (9), (10)
и (11).
Проекции членов уравнения (11) на оси Ox и Oy соответственно имеют вид
−(V |
+V |
)cos α = −V (r) =V (r) , |
|
C |
DC |
D |
Dx |
Рис. 4 |
= 2 0,314 cos30o = 0,544 м/с; |
||
V (r) |
|||
D |
|
|
|
(VC +VDC )sin α =VD(e) =VDy(e) ,
VD(e) = 2 0,314 sin 30o = 0,314 м/с.
Угловая скорость стержня 4 равна:
|
V (e) |
|
0,314 |
|
|
ω = |
D |
, ω = |
|
= 0,393 рад/с. |
|
|
|
||||
1 |
|
OD |
1 |
0,8 |
|
|
|
|
|
||
Направление ω1 против хода часовой стрелки определено с помощью вектора скорости VD(e) при повороте стержня 4 вокруг
против хода часовой стрелки определено с помощью вектора скорости VD(e) при повороте стержня 4 вокруг
оси О(z1).
Угловое ускорение стержня 4 найдем с помощью теоремы Кориолиса для точки D:
10
|
|
|
|
|
|
|
aD = aD(e) + aD(r) |
+ aD(K ). |
|
|
(12) |
||||
Абсолютное ускорение точки D определим по формуле для |
|||||||||||||||
плоского движения диска 1: |
|
|
|
|
|
|
|||||||||
a |
D |
= a |
|
+ a n |
+ a τ , |
an |
= ω2 DC, aτ |
= ε DC. |
(13) |
||||||
|
|
C |
|
DC |
|
DC |
|
DC |
|
DC |
|
|
|
||
Ускорение |
a |
вычислено ранее. |
Ускорение |
a n |
направлено |
||||||||||
|
|
|
|
|
C |
|
|
|
|
|
|
|
DC |
|
|
по |
|
, ускорение aDCτ |
|
|
и направлено в соответствии с кру- |
||||||||||
DC |
DC |
||||||||||||||
говой стрелкой |
ε |
по отношению к |
полюсу С; при |
||||||||||||
t = 1 с |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
an |
= |
π2 |
0, 2 |
= 0,493 м/с2 ; aτ |
= π 0, 2 |
= 0,628 м/с2 . |
||||||||
|
4 |
||||||||||||||
|
|
DC |
|
|
|
|
|
|
|
DC |
|
|
|
||
Переносное ускорение |
|
|
|
||||||||||||
|
|
|
|
|
|
|
aD(e) = aDn(e) + aD(eτ) , |
(14) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нормальное переносное ускорение aDn(e) = ω12 OD и направлено по стержню 4 к оси O(z1):
aDn(e) t=1 c = 0,3932 0,8 = 0,124 м/с2 ; aD(eτ) OD.
Кориолисово ускорение точки D:
aD(K ) = 2(ωe1 ×VD(r) ),
где ωe1 = ω1,
|
|
(K ) |
(r) |
n(r) |
), |
|
aD |
= 2ω1 VD |
sin(ω1, VD |
||
aD(K ) |
|
t=1c = 2 0,393 0,544 = 0, 428 м/с2. |
|||
|
|||||
Формула (12) с учетом (13) и (14) примет вид
a |
D |
= a |
+ a n |
+ a τ |
= a (e) + a (e) + a (r) + a (K ) . |
(15) |
|||||||||||
|
|
C |
|
DC |
|
DC |
|
Dn Dτ |
|
D |
|
D |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11

Направление ускорения aD(K ) получаем по правилу Жуковско-
го поворотом вектора VD(r) на 90° по круговой стрелке ωe1 = ω1.
Вектор относительного ускорения точки D равен aD(r) = aDn(r) + aD(rτ) ,
где aDn(r) = 0, так как относительное движение точки прямолиней-
ное. Поэтому вектор aD(r) = aD(rτ) и направлен по стержню 4.
Векторный многоугольник по уравнению (15) построен на рис. 5. Проекции членов уравнения (15) на оси Ox и Oy соответственно имеют вид
(aC + aDCτ )cos α−aDCn sin α = aD(rτ) −aDn(e) ; −(aC + aDCτ )sin α−aDCn cos α = −aD(K ) −aD(eτ) ;
aD(rτ) = (0,628 +0,628)cos30D −0,493 sin 30D +0,124 = 0,965 м/с2 ; aD(eτ) = (0,628 +0,628)sin 30D +0, 493 cos30D −0, 428 = 0,628 м/с2.
Рис. 5
Угловое ускорение стержня 4
ε1 = aD(eτ) , ε1 = 0,628 = 0,785 рад/с2. OD 0,8
12

Направление ε1 |
по ходу часовой стрелки определено с по- |
||
мощью направления вектора |
a (e) |
по отношению к оси вращения |
|
|
|
Dτ |
|
стержня O(z1).
2. Запишем уравнения проекций для расчета величин VMx1,
VMy1, aMx1 , aMy1 , ω1, ε1, aD(rτ) на ЭВМ. В уравнения проекций входят алгебраические величины. Здесь обозначено ω1 = α, ε1 = α.
Тогда для точки М из векторных формул (4) и (8) при положении системы в текущий момент времени (рис. 6) имеем
VMx1 =VCx1 +VMCx1 +VMx(r)1 ; VMx1 = −Rϕ+(R − S)ϕsin ϕ+ S cos ϕ; VMy1 =VCy1 +VMCy1 +VMy(r)1 ; VMy1 = −(R − S)ϕcos ϕ+ S sin ϕ; aMx1 = (aCx1 + aMCxn 1 + aMCxτ 1 )e + aMx(r)1 + aMx(K1) ;
aMx1 = −Rϕ+(R − S)ϕ2 cos ϕ+(R − S)ϕsin ϕ+ S cos ϕ−2Sϕsin ϕ;
aMy1 = (aCy1 + aMCyn 1 + aMCyτ 1 )e + aMy(r)1 + aMy(K1) ;
aMy1 = (R − S)ϕ2 sin ϕ−(R − S)ϕcos ϕ+ S sin ϕ+ 2Sϕcos ϕ.
Рис. 6
13

Проекции уравнений (11) и (15) на подвижные оси Oxy(OD = = xD) для точки D:
|
|
V =V +V =V (e) |
+V (r) ; V (e) |
= 0, |
|
|
|||||||||||||
|
|
|
Dx |
Cx |
DCx |
Dx |
|
Dx |
|
Dx |
|
|
|
||||||
|
|
|
V (r) = x |
D |
= −Rϕcos α + Rϕcos(ϕ−α); |
|
|
||||||||||||
|
|
|
Dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V =V +V =V (e) |
+V (r) ; V (r) |
= 0, |
|
|
|||||||||||||
|
|
|
Dy |
Cy |
DCy |
Dy |
|
Dy |
|
Dy |
|
|
|
||||||
|
|
V (e) =OD ω = x |
D |
α |
= Rϕsin α+ Rϕsin(ϕ−α). |
||||||||||||||
|
|
Dy |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Отсюда |
|
|
|
|
|
Rϕ[sin α +sin(ϕ−α)] |
|
|
|
|
|||||||||
|
|
|
ω = α |
= |
; |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
xD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
a |
Dx |
= a + an |
|
+ aτ |
|
= (a(e) ) |
x |
+(a(e) ) |
x |
+(a(r) ) |
x |
+ a(K ) ; |
|||||||
|
Cx |
DCx |
|
|
DCx |
|
Dn |
Dτ |
|
|
Dτ |
Dx |
|||||||
−Rϕcos α+ Rϕcos(ϕ−α) − Rϕ2 sin(ϕ−α) = −xDα2 + xD ; (aD(rτ) )x = xD = xDα2 − Rϕ[cos α−cos(ϕ−α)] − Rϕ2 sin(ϕ−α);
aDy = aCy + aDCyn + aDCyτ = (aDn(e) ) y +(aD(eτ) ) y +(aD(rτ) ) y + aDy(K ) ;
Rϕsin α+ Rϕsin(ϕ−α) + Rϕ2 cos(ϕ−α) = xDα+ 2xDα,
откуда
ε1 = α = x1 {−2xDα+ Rϕ[sin α+sin(ϕ−α)] + Rϕ2 cos(ϕ−α)}.
D
3. Проведем проверку полученных в п. 2 формул с помощью кинематики точки.
Запишем координаты точки М в неподвижной системе координат Ox1y1:
x1M =l − Rϕ−(R − S)cos ϕ, y1M = R −(R − S)sin ϕ.
Дифференцируя эти выражения, получим
VMx1 = x1M = −Rϕ+(R − S)ϕsin ϕ+ S cos ϕ;
14
VMy1 = y1M = −(R − S)ϕcos ϕ+ S sin ϕ.
Дифференцируя второй раз, получим
aMx1 = x1M = −Rϕ+(R − S)ϕ2 cos ϕ+(R − S)ϕsin ϕ−
−Sϕsin ϕ+ S cos ϕ− Sϕsin ϕ=
=−Rϕ+(R − S)ϕ2 cos ϕ+(R − S)ϕsin ϕ+ S cos ϕ−2Sϕsin ϕ;
aMy1 = y1M = (R − S)ϕ2 sin ϕ−(R − S)ϕcos ϕ+ Sϕcos ϕ+
+S sin ϕ+ Sϕcos ϕ= (R − S)ϕ2 sin ϕ−(R − S)ϕcos ϕ+
+S sin ϕ+ 2Sϕcos ϕ.
Эти формулы совпадают с аналогичными формулами п. 2. Для точки D запишем уравнения
x1D = xD cos α, y1D = xD sin α. |
(16) |
Дифференцируя (16) и (1), получим |
|
x1D = xD cos α− xDαsin α, y1D = xD sin α + xDαcos α; |
(17) |
x1D = −Rϕ+ Rϕcos ϕ, y1D = Rϕsin ϕ. |
(18) |
Из (17) и (18) найдем
|
x |
cos α+ y |
sin α = x |
D |
=V (r) ; |
(19) |
||||
|
1D |
|
1D |
|
|
|
Dx |
|
||
|
V (r) = −Rϕcos α + Rϕcos(ϕ−α); |
|
||||||||
|
Dx |
|
|
|
|
|
|
|
|
|
|
−x |
sin α+ y |
cos α = x |
D |
α =V (e) ; |
(20) |
||||
|
1D |
|
1D |
|
|
|
Dy |
|
||
|
α = ω = |
Rϕ[sin α +sin(ϕ−α)] |
. |
|
||||||
|
|
|
||||||||
|
|
1 |
|
|
xD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Дифференцируя (19), (20), (18), получим |
|
|||||||||
xD = x1D cos α+ y1D sin α +α(−x1D sin α+ y1D cos α) = |
|
|||||||||
= x |
cos α+ y |
sin α + x |
D |
α2 ; |
|
|
|
|
||
1D |
|
1D |
|
|
|
|
|
|
|
|
15

xDα+ xDα = −x1D sin α+ y1D cos α −α(x1D cos α + y1D sin α) = = −x1D sin α+ y1D cos α−αxD ;
x1D = −Rϕ+ Rϕcos ϕ− Rϕ2 sin ϕ;
y1D = Rϕsin ϕ+ Rϕ2 cos ϕ.
Окончательно найдем
xD = aDx(r) = −Rϕcos α + Rϕcos(ϕ−α) − Rϕ2 sin(ϕ−α) + xDα2 ;
α = ε1 = x1 {−2xDα+ Rϕ[sin α+sin(ϕ−α)] + Rϕ2 cos(ϕ−α)}.
D
Все формулы для точки D совпадают с полученными ранее. На рис. 7 представлены результаты расчетов на ЭВМ.
Пример 2. Кольцо D (рис. 8) движется по закону x1 = 2t – 1 м, y1 = 2t2 – 1 м в неподвижной системе координат Ox1y1. Оно надето на стержень 1, который вращается вокруг оси O1z1. Кольцо D считать точкой. C осью O1z1 жестко связана квадратная пластинка 2 со стороной b. На пластинке закреплена часть трубки 3, изогну-
той по дуге окружности. Внутри трубки по закону M0M = π2 rt2 м
движется точка М (М0, М – начальное и текущее положения точки М). В законах движения [t] = c, b = 2 м.
В момент времени t = 1 c определить: 1) угловые скорость и ускорение стержня 1, ускорение кольца D по отношению к стержню 1; 2) абсолютные скорость и ускорение точки М.
Решение. Неподвижная система отсчета задана (см. рис. 8). Подвижную систему отсчета Оxy свяжем со стержнем 1. Абсолютное движение точки D задано в условии задачи. Уравнение абсолютной траектории точки D имеет вид
|
(x +1)2 |
|
y = |
1 |
−1, −1 ≤ x < ∞; |
|
||
1 |
2 |
1 |
|
|
при t = 0 x1 = –1 м, y1 = –1 м, при t = 1 c x1 = y1 = 1 м (O1D = = 2 =1,41 м; α = 45D). Относительное движение точки D (кольца) – прямолинейное движение вдоль стержня 1, переносное движение – вращение стержня 1 вокруг оси O1z1.
16
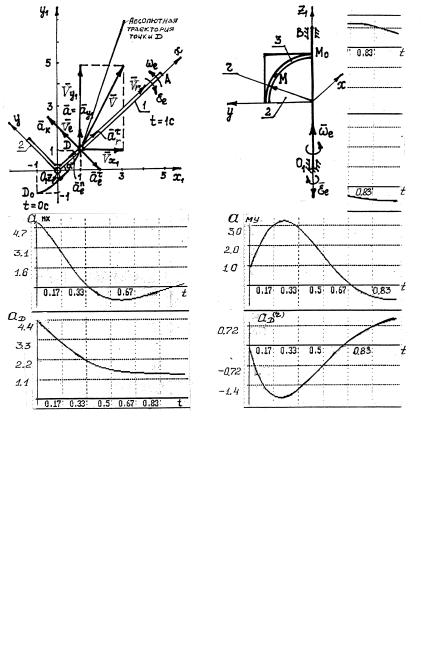
Рис. 7
Рис. 8
17
Формулу сложения скоростей для точки D запишем (индекс D опустим) в виде
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
=Vx |
+ Vy |
|
=Vr + Ve. |
|
|
|
|
|
|
|
|
|
|
(21) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проекции абсолютной скорости точки на неподвижные оси ко- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ординат |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Vx = x1 = 2 |
м/с; Vy |
|
|
= y1 = 4t, |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
при t =1 c Vx |
|
= 2 м/с, |
|
Vy |
|
|
= 4 м/с > 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
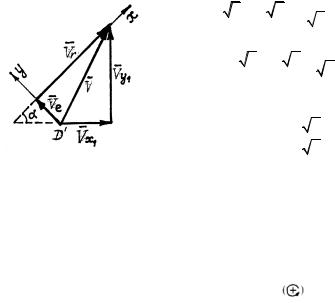
Построим многоугольник скоростей (рис. 9). Составим уравне- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ния проекций (21) на подвижные оси координат x, y: |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
V |
x |
|
cos α+V |
y |
|
|
|
sin α =V |
, |
|
V = 2 |
2 |
|
+ 4 |
|
|
2 |
=3 |
|
2 = 4, 24 м/с; |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
r |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
−V |
x |
|
sin α+V |
y |
|
|
cos α =V |
|
, |
|
|
V = −2 |
|
|
|
|
2 |
+ |
4 |
|
2 |
= |
|
2 =1,41 м/с. |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
e |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найдем угловую скорость стержня 1: |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω = |
|
Ve |
|
|
|
; |
|
|
|
ω |
= |
|
|
2 |
=1 рад/с. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
O1D |
|
|
|
|
|
|
|
e |
|
|
|
|
2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Направление круговой стрелки уг- |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ловой скорости ωe |
указано на рис. 8 и |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
определено |
|
|
|
с |
помощью |
|
направления |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вектора |
|
|
|
|
|
|
|
точки D по отношению к |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ve |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оси вращения O1z1 стержня 1 (угловая |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Рис. 9 |
|
|
|
|
|
|
|
|
|
|
|
|
скорость ωe направлена |
|
против хода |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
часовой стрелки |
|
|
|
). Формула сложе- |
||||||||||||||||||||||||||||||||||||
ния ускорений для точки D имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a = a |
x |
+ a |
y |
= a τ + a n + a |
τ + a |
K |
. |
|
|
|
|
|
(22) |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
e |
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Относительное |
|
|
|
|
движение |
|
точки |
|
|
|
|
|
|
прямолинейное, |
поэтому |
||||||||||||||||||||||||||||||||||||||||||||
arn = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Проекции абсолютного ускорения точки D на оси x1, |
y1: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
a |
x |
|
|
= x = 0; a |
y |
= y = 4 м/с2 |
|
> 0 (a = a |
y |
|
). |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||
18

Вычислим величину нормальной составляющей переносного
ускорения an = ω2 |
O D; |
an |
=12 2 =1, 41 м/с2. Вектор |
a n на- |
|||||||||||||
|
e |
|
|
|
e |
1 |
e |
|
|
|
|
|
|
|
e |
||
правлен к оси вращения O1z1 стержня 1 перпендикулярно ей. |
|||||||||||||||||
Определим ускорение Кориолиса точки D: |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
aK = 2(ωe ×Vr ), |
aK |
|
|
|
|
||||||||||||
= 2ωeVr sin(ωe ,Vr ), ωe Vr ; |
|
||||||||||||||||
a |
K |
= 2ω V sin 90D, |
a |
K |
= 2 1 4, 24 =8, 48 м/с2. |
|
|||||||||||
|
|
|
|
e |
r |
|
|
|
|
|
|
|
|
||||
Направление вектора aK |
точки D найдем по правилу Жуков- |
||||||||||||||||
ского. Вектор ωe |
перпендикулярен плоскости рисунка, в которой |
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||
лежит вектор Vr |
для точки D, поэтому повернем вектор Vr |
на 90° |
|||||||||||||||
по круговой |
стрелке ωe. Построим многоугольник ускорений |
||||||||||||||||
(рис. 10).
Рис. 10
Определим относительное ускорение точки D (по отношению к стержню 1) arτ и угловое ускорение εe стержня 1.
Составим уравнение проекции (22) на подвижные оси координат x, y:
a |
y |
sin α = −an + aτ, aτ = a |
y |
|
sin α + an , |
aτ = 4 |
2 |
+ |
2 = 4, 24 м/c2 ; |
||||||||
|
|
||||||||||||||||
|
|
e |
r |
r |
|
|
|
|
|
e |
r |
2 |
|
|
|
||
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
a |
y |
cos α = a |
K |
−aτ, aτ |
= a |
K |
−a |
y |
cos α, |
aτ =8, 48 |
−4 |
2 |
=5,66 м/c2 ; |
||||
|
|||||||||||||||||
|
|
e |
e |
|
|
|
|
e |
|
|
2 |
|
|||||
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
εe = aeτ , εe = 4 рад/c2.
O1D
19