2.4. Относительное движение двух летательных аппаратов в других системах координат.
Относительное движение двух летательных аппаратов можно рассматривать и в других системах координат. При этом попытка получить аналитическое решение также приводит к необходимости принятая допущения об относительной малости компонент вектора относительной дальности.
В
частности, можно рассматривать
относительное движение в орбитальной
цилиндрической системе координат
(ЦСК). Начало О
этой системы координат (рис. 2.2)
связано с центром масс пассивного ЛА,
а положение активного ЛА относительно
пассивного характеризуется смещением
вдоль дуги опорной орбиты
![]() высотным
отклонением от опорного движения
высотным
отклонением от опорного движения![]() и
боковым отклонениемz
(очевидно, что при достаточно малых
значениях угла
и
боковым отклонениемz
(очевидно, что при достаточно малых
значениях угла
![]() компоненты вектора относительного
положения в ОСК и ЦСК практически
совпадают).
компоненты вектора относительного
положения в ОСК и ЦСК практически
совпадают).
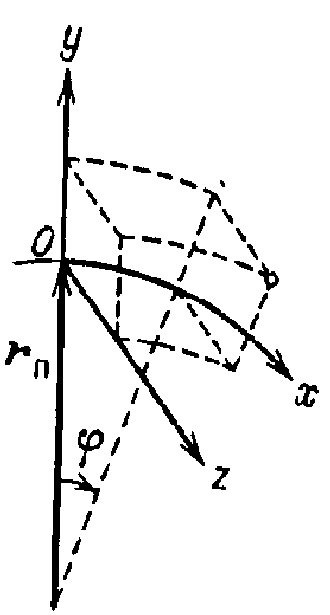
Рис. 2.2. Орбитальная цилиндрическая объектоцентрическая система координат.
Интересным
является тот факт, что решения систем
линейного приближения в ОСК и ЦСК
идентичны, отличаясь лишь трактовкой
компонент вектора состояния. Однако
при получении системы линейного
приближения в ЦСК проводится разложение
в ряд выражения
![]() и
делается допущение о малости компонентy
и z
относительно R,
но не принимается никаких ограничивающих
допущений о величине компоненты х.
Этот факт очень существен, поскольку
во многих практических задачах
рассогласование в положениях летательных
аппаратов вдоль дуги опорной орбиты
может составлять сотни и тысячи
километров, т.е. может быть вполне
соизмеримым с величиной R.
Отсюда следует естественный и полезный
вывод: допустимая область применения
решения системы линейного приближения
при трактовке вектора состояния в
декартовой системе существенно более
ограничена, и в случаях, когда
рассогласование в положениях
летательных аппаратов вдоль дуги
опорной орбиты достаточно велико,
трактовка вектора состояния в
цилиндрической системе позволяет
получать результаты прогнозирования
с меньшими погрешностями.
и
делается допущение о малости компонентy
и z
относительно R,
но не принимается никаких ограничивающих
допущений о величине компоненты х.
Этот факт очень существен, поскольку
во многих практических задачах
рассогласование в положениях летательных
аппаратов вдоль дуги опорной орбиты
может составлять сотни и тысячи
километров, т.е. может быть вполне
соизмеримым с величиной R.
Отсюда следует естественный и полезный
вывод: допустимая область применения
решения системы линейного приближения
при трактовке вектора состояния в
декартовой системе существенно более
ограничена, и в случаях, когда
рассогласование в положениях
летательных аппаратов вдоль дуги
опорной орбиты достаточно велико,
трактовка вектора состояния в
цилиндрической системе позволяет
получать результаты прогнозирования
с меньшими погрешностями.
В дальнейшем мы не будем оговаривать особо, какую из систем координат мы используем, полагая, что выбор системы осуществлен в соответствии с конкретными условиями решаемой задачи.
2.5. Траектория относительно опорного движения. Смещение движения.
Пользуясь свойством независимости плоского и бокового движений в решении (2.6), рассмотрим геометрию движения ЛА в плоскости опорной орбиты. Для этого сгруппируем члены первых двух уравнений (2.6) следующим образом:
![]()
Введем
величину
 и заметим, что всегда можно найти такое
значение некоторого угла
и заметим, что всегда можно найти такое
значение некоторого угла![]() что
что

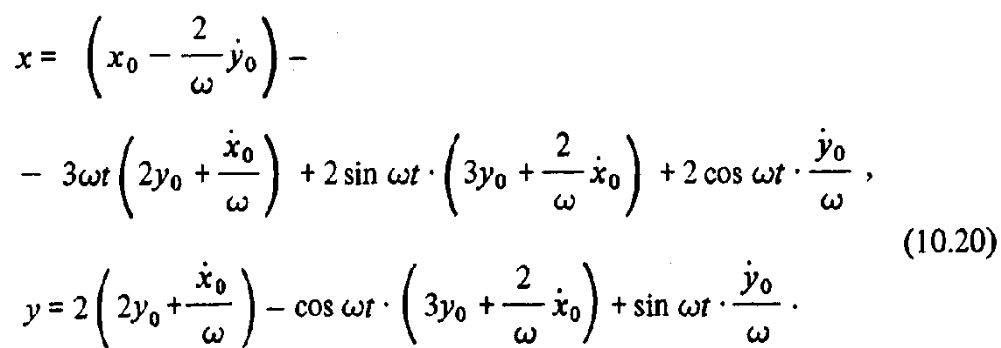
Теперь уравнения (2.9), описывающие траекторию относительного движения, приводятся к виду

![]()
Выделим слагаемые:

![]()
![]()
характеризующие движение по эллипсу, и слагаемое, характеризующее движение центра эллипса параллельно оси х со скоростью

![]()
![]()
причем в начальный момент времени t = 0 центр эллипса имеет координаты

![]()
Величина полуоси эллипса вдоль оси Ох вдвое больше величины полуоси вдоль оси Оу и движение по эллипсу происходит против направления движения часовой стрелки, причем началом отсчета угла а является луч, исходящий из центра эллипса в направлении, обратном направлению оси Оу.
Центр
эллипса может лежать выше и ниже опорной
орбиты - его положение определяется
знаком скобки
 который
определяет и направление скорости
смещения эллипса вдоль осиOx:
при
который
определяет и направление скорости
смещения эллипса вдоль осиOx:
при
![]() центр
лежит выше орбиты, а скорость его
смещения отрицательна, в противном
случае – наоборот. При
центр
лежит выше орбиты, а скорость его
смещения отрицательна, в противном
случае – наоборот. При центр лежит на осиОx
и не смещается в течении времени.
центр лежит на осиОx
и не смещается в течении времени.
Из второго уравнения (5.21) определяются максимальные и минимальные смещения по высоте относительно опорного движения

![]()
![]()
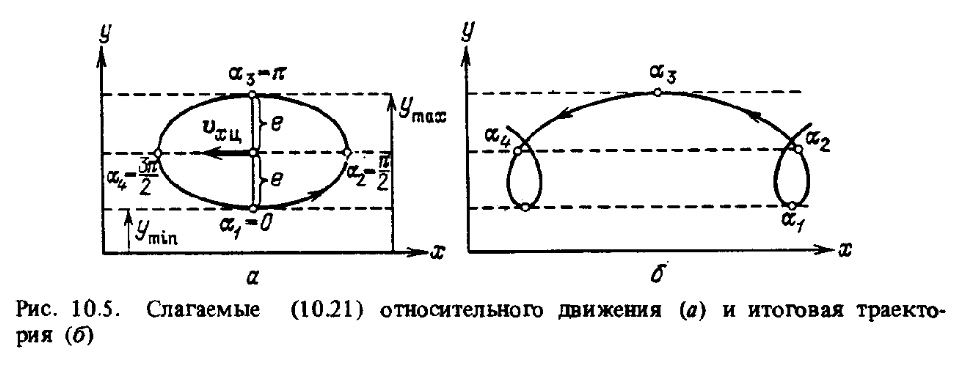
На рис. 2.3,а изображено движение по эллипсу согласно (2.11), на рис. 2.5, б — суммарное движение в соответствии с (2.10).
Говоря об относительном движении, не будем забывать, что каждый из двух летательных аппаратов движется по кеплеровой орбите, причем опорная орбита является круговой, а другая орбита, — вообще говоря, эллиптической. Будем называть вторую орбиту возмущенной и установим связь между параметрами относительного движения и кеплеровыми элементами возмущенной орбиты.
Поскольку опорное движение происходит по круговой орбите радиуса R, можно определить перигейное и апогейное расстояния возмущенной орбиты, соответствующие экстремальным высотам относительного движения:
![]()
Зная
![]() возмущенной
орбиты, нетрудно определить ее большую
полуось
возмущенной
орбиты, нетрудно определить ее большую
полуось

т.е.
от большой полуоси опорной орбиты
![]() большая
полуось возмущенной орбиты отличается
на
большая
полуось возмущенной орбиты отличается
на Заметим, что
Заметим, что![]()
Поскольку
при изменении большой полуоси орбиты
на
![]() ее период в линейном приближении
меняется на величину
ее период в линейном приближении
меняется на величину

то
период возмущенной орбиты отличается
от периода опорного движения
![]() на величину
на величину