

Для закрепления долот при твч-нагреве
Для осуществления ТВЧ-наплавки и ТВЧ-борирования непрерывно-последовательным способом с помощью плоского одностороннего индуктора, приведенного на рисунке 8, а также автоматизации широкого круга технологических процессов, в ГОСНИТИ был разработан электромеханический робот-манипулятор, позволяющий регулировать положение детали в 3-х степенях свободы (рисунок 14).

Рисунок 14. Робот-манипулятор
Закрепление
заготовки осуществлется на конце руки
робота-манипулятора, путем зажатия по
боковым поверхностям в универсальном
тисочном приспособлении через
диэлектрические прокладки.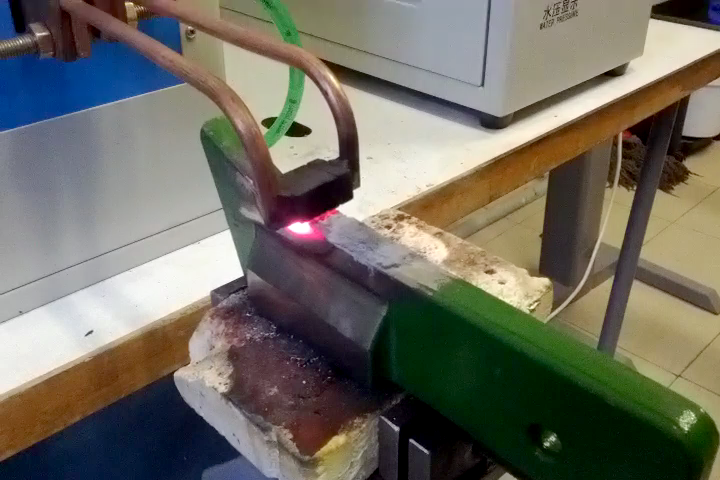
Рисунок 15. Обработка фаса
Краткое описание конструкции установки для индукционной наплавки твч.
Установка предназначена для перемещения детали при наплавке ТВЧ.
Рис 16. Внешний вид установки:

Установка имеет 5 степеней свободы: 3 линейные степени свободы: перемещение по оси X, Y, Z и вращение вокруг осей X и Y.
Линейные перемещения осуществляются за счёт винтовой передачи. В качестве винта используется метрический винт с резьбой М16 на оси X и Y и М12 на оси Z. В качестве направляющих использованы профильные рельсовые направляющие соответствующего типоразмера. Привод осуществляется мотор-редуктором с асинхронным электродвигателем (i=1500об/мин, Р=0,09кВт) и соосным цилиндрическим редуктором с передаточным отношением 1:10. Особенностью оси Z является ремённая передача, которая позволяет развернуть привод на 180 градусов и значительно сократить габариты конструкции. Асинхронные электродвигатели управляются с помощью частотного преобразователя.
Вращения вокруг осей X и Y осуществляются за счёт шаговых двигателей GD57STH76-2808A. Шаговые двигатели управляются с помощью контроллера и драйвера.
Диапазоны хода и скорости представлены в таблице.
|
№ |
Параметр |
Значение |
|
|
Скорость перемещения: |
|
|
1 |
Продольное, мм/мин |
30…300 |
|
2 |
Вертикальное, мм/мин |
30…300 |
|
3 |
Поперечное, мм/мин |
13,1…131 |
|
4 |
Вращение заготовки, об/мин |
0.1…10 |
|
5 |
Поворот заготовки, об/мин |
1…10 |
|
|
Диапазон перемещения |
|
|
6 |
Продольное, мм |
0…700 |
|
7 |
Вертикальное, мм |
0…450 |
|
8 |
Поперечное, мм |
0…400 |
|
9 |
Поворот заготовки, град |
0…90 |
|
10 |
Вращение заготовки, град |
Без ограничений |
В установке реализованы две системы управления: автоматическая и автоматизированная.
При автоматическом управлении оператор настраивает и управляет работой установки с пульта управления.
При автоматизированном управлении оператор программирует работу приводов на компьютере, дальнейший процесс работы установки не требует вмешательства оператора.
Установка заготовки производится на вращающемся столе, диаметром 200 мм.
При необходимости стол можно заменить, установить на него дополнительное оборудование (тиски и прочее). Также допускается устанавливать длинномерные заготовки непосредственно на балку перемещения по оси Z.
Конструкция установки открытая, что позволяет осуществлять дальнейшую модернизацию системы (изменение скоростей перемещений, мощности приводов, и т.д.) под требования конкретных заказчиков без существенной переделки конструкции.