

Методика приведения масс
Методика приведения масс основана на равенстве кинетических энергий исходного машинного агрегата и заменяющей его динамической модели. Запишем для них уравнение изменения кинетической энергии.
Кинетическая энергия:
|
Движение твердого тела |
Кинетическая энергия |
|
Вращение |
|
|
Поступательное движение |
|
|
Плоское движение |
|
Окончательно
для механической системы
![]() ,
,
где
![]() - число звеньев двигающихся вращательно,
- число звеньев двигающихся вращательно,![]() - момент инерции этих звеньев относительно
точки закрепления, если центр масс не
лежит на оси, то применяют теорему
Штейнера –Гюйгенса:
- момент инерции этих звеньев относительно
точки закрепления, если центр масс не
лежит на оси, то применяют теорему
Штейнера –Гюйгенса:
![]() ,
,
где
![]() - расстояние от центра масс звена до оси
вращения,
- расстояние от центра масс звена до оси
вращения,![]() -
момент инерции звеньев относительно
центра масс,
-
момент инерции звеньев относительно
центра масс,![]() - число звеньев, движущихся плоско,
- число звеньев, движущихся плоско,![]() - число звеньев движущихся поступательно.
- число звеньев движущихся поступательно.
для модели (вращающейся)
![]()
Модель будет энергетически эквивалентна рассматриваемой механической системе, если правые и левые части уравнений изменения кинетической энергии для модели и для системы будут соответственно равны.
Подставляя в равенства, записанные ранее выражения для кинетических энергий, получим:
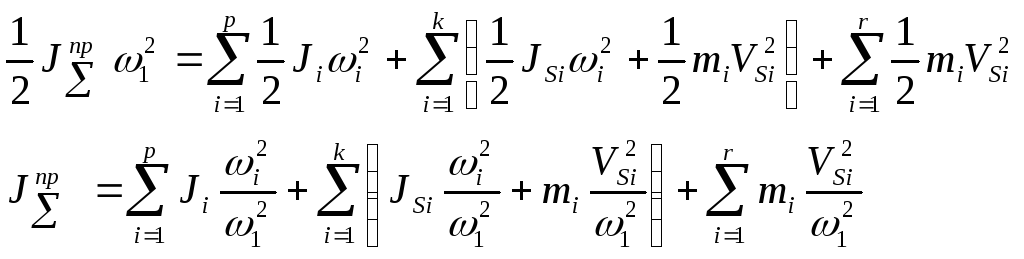
Из уравнения для левых частей получаем формулу для определения приведенного суммарного момента инерции динамической модели
![]()
В любом машинном агрегате приведенный суммарный момент инерции динамической модели состоит из 2-х частей:
![]()
![]() -
приведенный момент инерции первой
группы звеньев. К первой группе звеньев
относятся те звенья, которые имеют
постоянное передаточное отношение со
звеном приведения.
-
приведенный момент инерции первой
группы звеньев. К первой группе звеньев
относятся те звенья, которые имеют
постоянное передаточное отношение со
звеном приведения.
![]() -
приведенный момент инерции второй
группы звеньев. Ко второй группе звеньев
относятся те звенья, которые не имеют
постоянного передаточного отношения
со звеном приведения.
-
приведенный момент инерции второй
группы звеньев. Ко второй группе звеньев
относятся те звенья, которые не имеют
постоянного передаточного отношения
со звеном приведения.
Прямая задача динамики машин.
Прямая задача динамики машины, как отмечалось и ранее, является задачей анализа, задачей по определению закона движения механической системы под действием заданных внешних сил. При решении этой задачи параметры машинного агрегата и действующие на него внешние силы известны, необходимо определить закон движения: скорости и ускорения в функции времени или обобщенной координаты. Иначе эту задачу можно сформулировать так: заданы управляющие силы и силы внешнего сопротивления, определить обеспечиваемый ими закон движения машины.
Обратная задача -это задача синтеза управления, когда задан требуемый закон движения машины и внешние силы сопротивления, а определяются управляющие силы.
При решении задач динамики используются либо уравнения силового равновесия системы - метод кинетостатики, либо уравнения энергетического равновесия - закон сохранения энергии. Для идеальной механической системы, в которой нет потерь энергии и звенья абсолютно жесткие, этот закон можно применять в виде теоремы об изменении кинетической энергии. Согласно этой теореме работа всех внешних сил действующих на систему расходуется только на изменение ее кинетической энергии. При этом потенциальные силы - силы веса рассматриваются как внешние.
Уравнения движения машинного агрегата в энергетической и дифференциальной форме
Как говорилось ранее, механизм машинного агрегата обычно является многозвенной системой, нагруженной силами и моментами, приложенными к различным ее звеньям. Определение закона движения такой сложной многозвенной системы представляет собой сложную задачу. Как правило, рассматриваемые в этом курсе машинные агрегаты, имеют одну степень свободы. Это значит, что, прежде всего, необходимо определить закон движения всего лишь одного звена, которое будет являться начальным. Заменяем весь сложный многозвенный механизм одним условным звеном – динамической моделью.