

LEKTsIYa_9
.doc|
|
ЛЕКЦИЯ 9 |
|
Силовой расчет
Краткое содержание: Силовой расчет. Исходные данные для силового расчета. Порядок силового расчета. Метод Жуковского. Силы инерции, действующие на звенья кривошипно-ползунного механизма. Пример выполнения ДЗ№2.
![]()
Силовой расчет рычажных механизмов
Во время движения механизма в его кинематических парах действуют силы, являющиеся силами взаимодействия между звеньями. Напомним, что эти силы относятся к категории внутренних по отношению к механизму в целом. Нагруженность кинематических пар силами взаимодействия является важной динамической характеристикой механизма. Знание сил в кинематических парах необходимо для расчета звеньев механизма на прочность, жесткость, вибростойкость, износоустойчивость, для расчетов подшипников на долговечность и для проведения других подобных расчетов, выполняемых при проектировании механизма. Определение внутренних сил, а также — в целом ряде задач — сил и пар сил, приложенных к механизму извне, составляет содержание его силового расчета.
Изложение методов силового расчета будет сделано только для плоских механизмов. При этом примем, что механизм имеет плоскость симметрии, которая параллельна плоскости движения и в которой действуют все приложенные силы. Указанному условию отвечает очень большое число механизмов энергетических, технологических, транспортных машин и различных приборов.
Силовой расчет следует выполнять с учетом ускоренного движения звеньев, так как их ускорения в современных быстроходных машинах весьма значительны. Неучет ускоренного движения звеньев вызовет недооценку нагружающих сил, что может привести к ошибкам в дальнейших инженерных расчетах.
Учет ускоренного движения звеньев выполним методом кинетостатики, условно приложив к каждому подвижному звену механизма главный вектор, и главный момент сил инерции. Тогда для каждого звена можно записать уравнения кинетостатики.
Главный вектор, и главный момент сил инерции определяются по уравнениям:
![]()
эти уравнения предполагают, что главный вектор сил инерции приложен к центру масс и направлен в сторону противоположную соответствующему ускорению, а главный момент сил инерции направлен против углового ускорения и его удобнее разбивать на пару сил:
![]() .
.
Следует подчеркнуть, что
никакой силы
![]() ;
и никакой пары сил
;
и никакой пары сил
![]() к звену в действительности
не приложено. Главный вектор и главный
момент сил инерции не
имеют никакого физического содержания
и в расчетных уравнениях
играют роль не более чем чисто
математических величин, посредством
которых учитывается влияние ускоренного
движения звеньев.
к звену в действительности
не приложено. Главный вектор и главный
момент сил инерции не
имеют никакого физического содержания
и в расчетных уравнениях
играют роль не более чем чисто
математических величин, посредством
которых учитывается влияние ускоренного
движения звеньев.
Силы в кинематических парах, являющиеся искомыми, определяют из уравнений, в которых они содержатся в составе сумм. Поскольку значения сил инерции зависят от ускорений, искомые силы также зависят от ускорений. Следовательно, для проведения силового расчета надо знать закон движения механизма.
Исходные данные для силового расчета
-
Кинематическая схема механизма
-
Инерционные характеристики
-
Закон движения входного звена
-
Силовое нагружение.
Силовой расчет позволяет определить
-
Усилия в кинематических парах
-
Момент или движущую силу, которые могут преодолеть заданное сопротивление и обеспечивающие заданный закон движения механизма.
Порядок силового расчета
-
Структурный анализ механизма и определение порядка расчета. Порядок силового расчета является обратным порядку кинематического исследования, т.е. силовой расчет начинается с последней (считая от ведущего звена) присоединенной группы и кончается силовым расчетом начального звена.
-
Кинематическое исследование и определение ускорений центров масс всех звеньев механизма, а также угловые ускорения всех вращающихся и плоско движущихся звеньев.
-
Определение сил и моментов инерции. В общем случае, когда тело совершает плоское движение, все силы инерции приводятся к главному вектору и главному моменту сил инерции, который в свою очередь раскладывается на пару сил. Если движение тела поступательное, то главный момент сил инерции равен нулю, если вращение вокруг закрепленного центра масс – то главный вектор сил инерции равен нулю.
-
Определение усилий в кинематических парах и недостающей силовой нагрузки.
Принцип Д’Аламбера:
При движении механической системы активные силы, силы реакций связей вместе с силами инерции образуют равновесную систему сил для каждой точки системы. Таким образом, в конкретный момент времени можно к рассматриваемой системе применять уравнения статики:
![]()
При этом, если все моменты разложены на пары сил, а расчетные схемы построены в одном масштабе, то плечи для определения моментов берутся с чертежа в мм, а за положительное направление поворота принимают направление против часовой стрелки. Для нахождения сумм сил строятся планы сил в определенном масштабе, который может быть различным для различных расчетных схем.
Существует ряд правил, позволяющих упростить решение поставленной задачи:
-
Для звена, входящего в поступательную пару, если все силы проходят через одну точку, то и реакция поступательной пары будет проходить через эту точку, а, следовательно, останется только одна неизвестная – ее значение, а направлена эта реакция перпендикулярно направляющей.
-
Для звена входящего во вращательную пару известна точка приложения реакции – шарнир, но неизвестно направление и величина. Для упрощения вычислений довольно часто раскладывают эту реакцию на составляющие: нормальную - параллельно звену и тангенциальную – ему перпендикулярно.
-
Для звена входящего в две вращательные пары и ненагруженного внешними нагрузками – реакции в этих парах будут направлены вдоль звена, навстречу друг другу.
Для каждой расчетной схемы может быть решена задача с тремя неизвестными. Если в предложенной расчетной схеме две неизвестных величины (величина и направление одной силы; величины двух сил, при этом их направления известны), то результат можно получить, используя план сил.
Если в предложенной расчетной схеме три неизвестных (и при этом возможно составить уравнение моментов!) то:
-
Для нахождения одной неизвестной (направление силы известно, а величина нет) необходимо составить уравнение моментов относительно той точки, относительно которой полностью неизвестная сила (и величина и направления не заданы) не имеет плеча.
-
Составляют план сил для нахождения неизвестной силы.
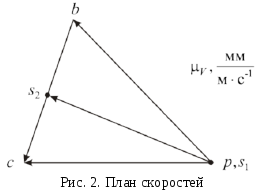
Метод Жуковского
Для применения этого метода
необходимо повернуть план скоростей
на
![]() (рекомендуется поворачивать в сторону
противоположную
(рекомендуется поворачивать в сторону
противоположную
![]() ).
Переносим все заданные силы, действующие
в рассматриваемый момент времени на
звенья механизма, в том числе и силы
инерции, в одноименные точки повернутого
плана скоростей, не изменяя при этом
величины и направления этих сил. (Силы
реакции в Рычаге Жуковского не участвуют!)
Составляем уравнение моментов всех
перенесенных сил относительно полюса
плана скоростей, т. е. рассматриваем
план скоростей как некоторый рычаг с
опорой в полюсе плана скоростей,
находящийся под действием всех
рассматриваемых сил в равновесии. Плечи
всех сил берутся непосредственно с
чертежа в мм.
).
Переносим все заданные силы, действующие
в рассматриваемый момент времени на
звенья механизма, в том числе и силы
инерции, в одноименные точки повернутого
плана скоростей, не изменяя при этом
величины и направления этих сил. (Силы
реакции в Рычаге Жуковского не участвуют!)
Составляем уравнение моментов всех
перенесенных сил относительно полюса
плана скоростей, т. е. рассматриваем
план скоростей как некоторый рычаг с
опорой в полюсе плана скоростей,
находящийся под действием всех
рассматриваемых сил в равновесии. Плечи
всех сил берутся непосредственно с
чертежа в мм.
![]()
Подобная геометрическая интерпретация принципа возможных перемещений представляет значительные удобства для решения многих задач динамики механизмов. Метод этот получил название метода Жуковского по имени ученого, которым он был предложен, а рычаг, которым пользуются в этом методе, назван рычагом Жуковского.
Метод Жуковского может быть применен для нахождения величины какой-либо одной неизвестной силы из числа сил, входящих в уравнение моментов, если точка приложения и направление этой силы заданы, а также заданы величины, направления и точки приложения всех остальных сил. В самом деле, в этом случае в записанном уравнении будет только одна неизвестная величина искомой силы, которая из него и определится.
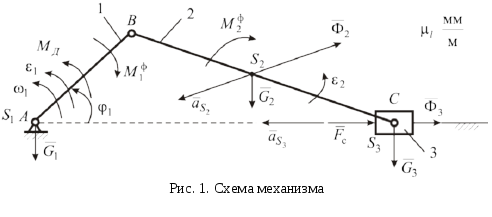
Силы инерции, действующие на звенья кривошипно-ползунного
механизма
1 Построение плана механизма в масштабе.
2. Кинематическое исследование механизма
Построение плана скоростей.
|
|
|
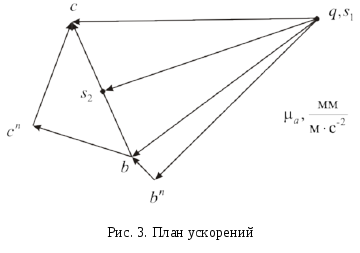
Построение плана ускорений.
|
|
|
 ;
;
3 Определение сил инерции.
Звено 1:
![]() ,
т.к.
,
т.к.
![]() ;
; ![]() .
.
Звено 2:
![]() ,
, ![]() .
.
Звено 3:
![]() ,
, ![]() ,
т.к.
,
т.к.
![]() .
.
Знак «минус» показывает, что силы инерции направлены противоположно ускорениям центров масс, а моменты сил инерции направлены противоположно угловым ускорениям.