

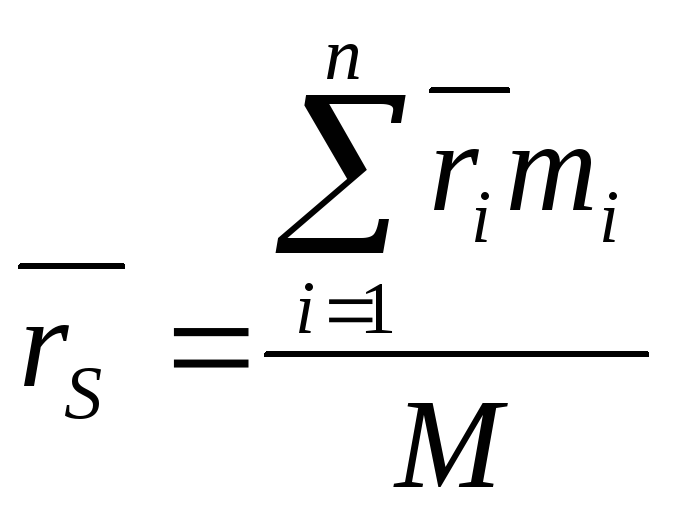
Статическое уравновешивание рычажных механизмов
Целью такого уравновешивания является
устранение переменных воздействий на
фундамент механизма. Вообще, как
говорилось ранее, уравновешенным
считается то механизм, у которого главный
вектор и главный момент сил инерции
равны нулю, но на практике довольно
часто ограничиваются только статическим
уравновешиванием, т.е.
![]() .
.
Практика показывает, что влияние вращения на инерционность механизма, как правило, чрезвычайно мала.
![]() ,
т.к.
,
т.к.![]() ,
то необходимо, чтобы
,
то необходимо, чтобы![]() .
Это условие можно выполнить, если
скорость центра масс механизма равна
нулю, или она постоянна по величине и
направлению. Обеспечить выполнение
условие постоянства скорости движения
центра масс в механизме практически
невозможно. Поэтому при статическом
уравновешивании обеспечивают выполнение
первого условия. Это возможно, когда
центр масс механизма лежит на оси
вращения звена -
.
Это условие можно выполнить, если
скорость центра масс механизма равна
нулю, или она постоянна по величине и
направлению. Обеспечить выполнение
условие постоянства скорости движения
центра масс в механизме практически
невозможно. Поэтому при статическом
уравновешивании обеспечивают выполнение
первого условия. Это возможно, когда
центр масс механизма лежит на оси
вращения звена -![]() ,или
когда он неподвижен
,или
когда он неподвижен![]() .
.
Из теоретической механики известно,
что
На практике наиболее часто статическое уравновешивание проводят:
выбирая симметричные схемы механизма;
устанавливая на звеньях механизма противовесы (или корректирующие массы);
размещая противовесы на дополнительных звеньях или кинематических цепях.
Метод замещающих масс.
При использовании метода замещающих масс, звено механизма с распределенной массой заменяется расчетной моделью, которая состоит из точечных масс.
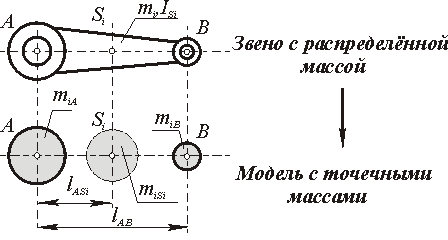
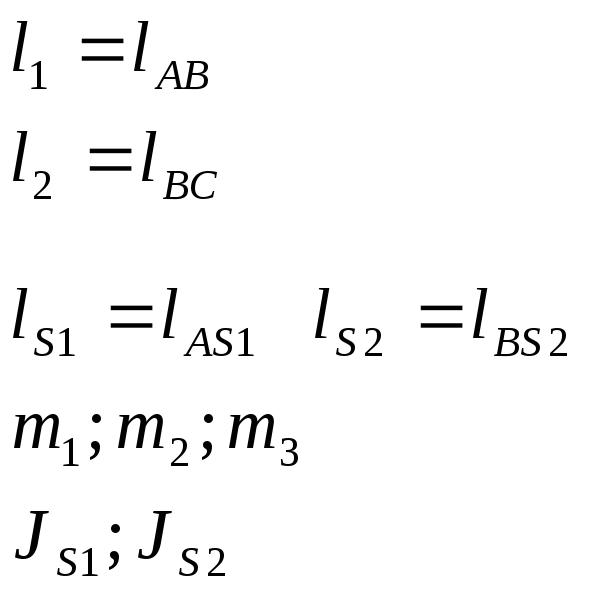
Условия перехода от звена с распределенной массой к модели с точечными массами.
Сохранение размеров звена
 .
.Сохранение массы звена:
Сохранение положения центра масс

Сохранение момента инерции

Очевидно, что выполнить три последних условия системой с двумя массами невозможно, поэтому при статическом уравновешивании механизмов ограничиваются выполнением только двух первых условий. Чтобы обеспечить выполнение всех трех условий необходимо ввести третью массу. Рассмотрим применение метода замещающих масс при полном и частичном статическом уравновешивании кривошипно-ползунного механизма.
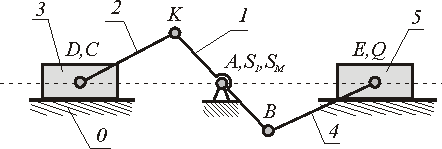
Полное статическое уравновешивание кривошипно-ползунного механизма.
П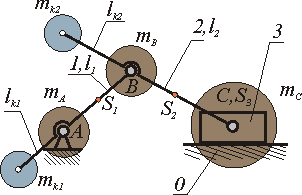 остановка
задачи:
остановка
задачи:
Дано:
Определить:Массы противовесов
для перемещения центра масс механизма
в неподвижную точку -![]() .
.
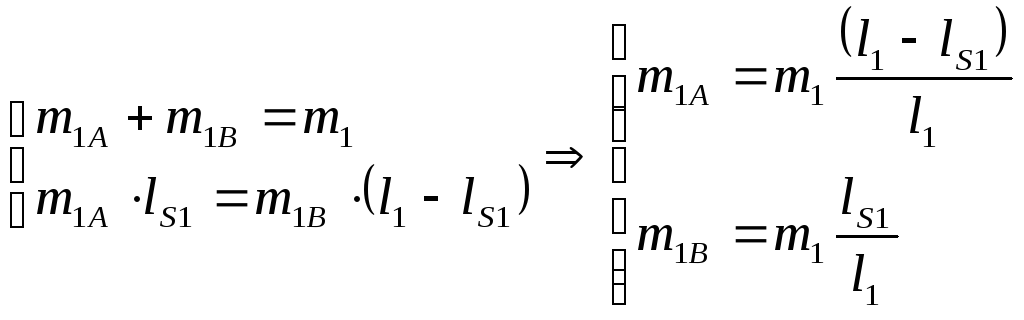
Распределим массы звеньев по методу замещающих масс и сосредоточим их в центрах шарниров. Тогда для шатуна:
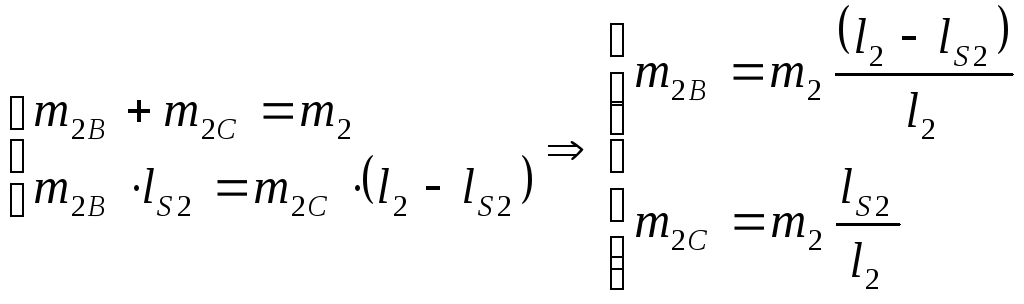
Так как в шарнире
![]() скреплены 2 и 3 звенья, то там сосредоточенна
масса
скреплены 2 и 3 звенья, то там сосредоточенна
масса![]() .
.
На продолжении звена 2 располагаем
противовес – корректирующую массу, для
того чтобы центр масс связки звеньев 2
и 3 (точечные массы
![]() )
переместился в шарнир
)
переместился в шарнир![]() ,
уравнение статических моментов запишется
в виде:
,
уравнение статических моментов запишется
в виде:
![]() .
.
Рассмотрим кривошип:
Теперь в шарнире
![]() сосредоточены массы
сосредоточены массы![]() .
На продолжении кривошипа располагаем
противовес – корректирующую массу, для
того, чтобы центр масс всего механизма
переместился в шарнир
.
На продолжении кривошипа располагаем
противовес – корректирующую массу, для
того, чтобы центр масс всего механизма
переместился в шарнир![]() - неподвижную точку. Уравнение статических
моментов относительно шарнира
- неподвижную точку. Уравнение статических
моментов относительно шарнира![]() запишется в виде:
запишется в виде:
![]()
B поставленной задачи, задаются либо расстоянием по условиям удобства размещения противовесов на механизме, а корректирующие массы рассчитывают, либо решают обратную задачу, задают корректирующие массы, а место их расположения рассчитывают по приведенным зависимостям.