

3.3. Типовые динамические звенья и их характеристики 3.3.1. Элементарные звенья
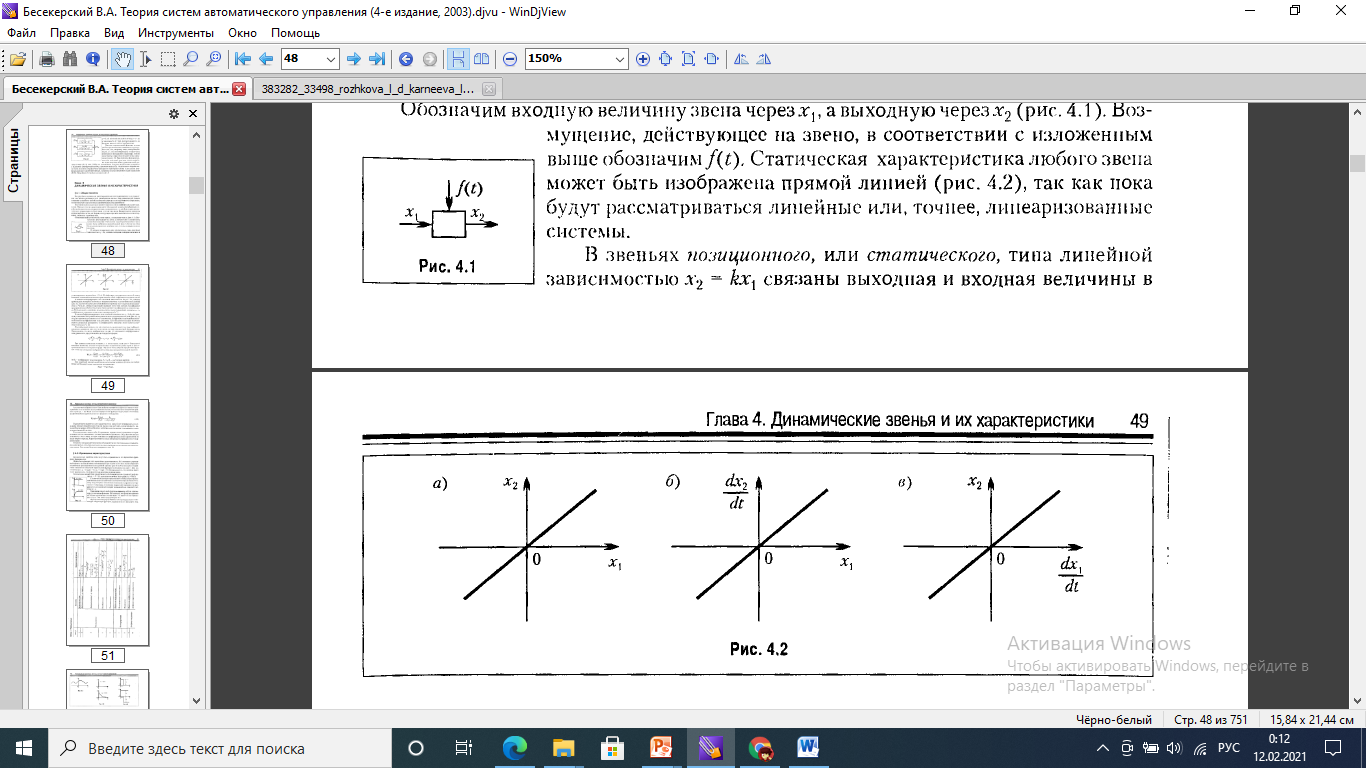

В звеньях позиционного, или
статического типа линейной зависимостью
 связаны выходная и входная величины в
установившемся режиме (рис. а). Коэффициент
пропорциональности k
между выходной и входной величинами
представляет собой коэффициент передачи.
связаны выходная и входная величины в
установившемся режиме (рис. а). Коэффициент
пропорциональности k
между выходной и входной величинами
представляет собой коэффициент передачи.
В звеньях
интегрирующего типа линейной
зависимостью
 производная
выходной величины и входная величина
в установившемся режиме (рис. б). В этом
случае для установившегося режима будет
справедлива равенство
производная
выходной величины и входная величина
в установившемся режиме (рис. б). В этом
случае для установившегося режима будет
справедлива равенство
 ,
откуда и произошло название этого типа
звеньев.
,
откуда и произошло название этого типа
звеньев.
В звеньях
дифференцирующего типа линейной
зависимостью
 связаны в установившемся режиме выходная
величина и производная входной (рис.
в), откуда и произошло название этого
типа звеньев.
связаны в установившемся режиме выходная
величина и производная входной (рис.
в), откуда и произошло название этого
типа звеньев.
Пропорциональное (безынерционное) звено. Пропорциональным звеном называют звено, которое описывается уравнением
 ,
,
где
 –
коэффициент усиления звена.
–
коэффициент усиления звена.
Это – наиболее простое звено, процессы в котором протекают без запаздывания. Его передаточная функция
 ,
амплитудно-фазовая характеристика
вырождается в точку на действительной
оси, логарифмическая амплитудная
частотная характеристика параллельна
оси частот во всем диапазоне частот и
проходит на уровне
,
амплитудно-фазовая характеристика
вырождается в точку на действительной
оси, логарифмическая амплитудная
частотная характеристика параллельна
оси частот во всем диапазоне частот и
проходит на уровне
 ,
фазовая частотная характеристика
совпадает с осью частот, так как
,
фазовая частотная характеристика
совпадает с осью частот, так как
 и, наконец, переходная функция этого
звена
и, наконец, переходная функция этого
звена
 повторяет без искажений входную
ступенчатую функцию (рис. 3.5).
повторяет без искажений входную
ступенчатую функцию (рис. 3.5).
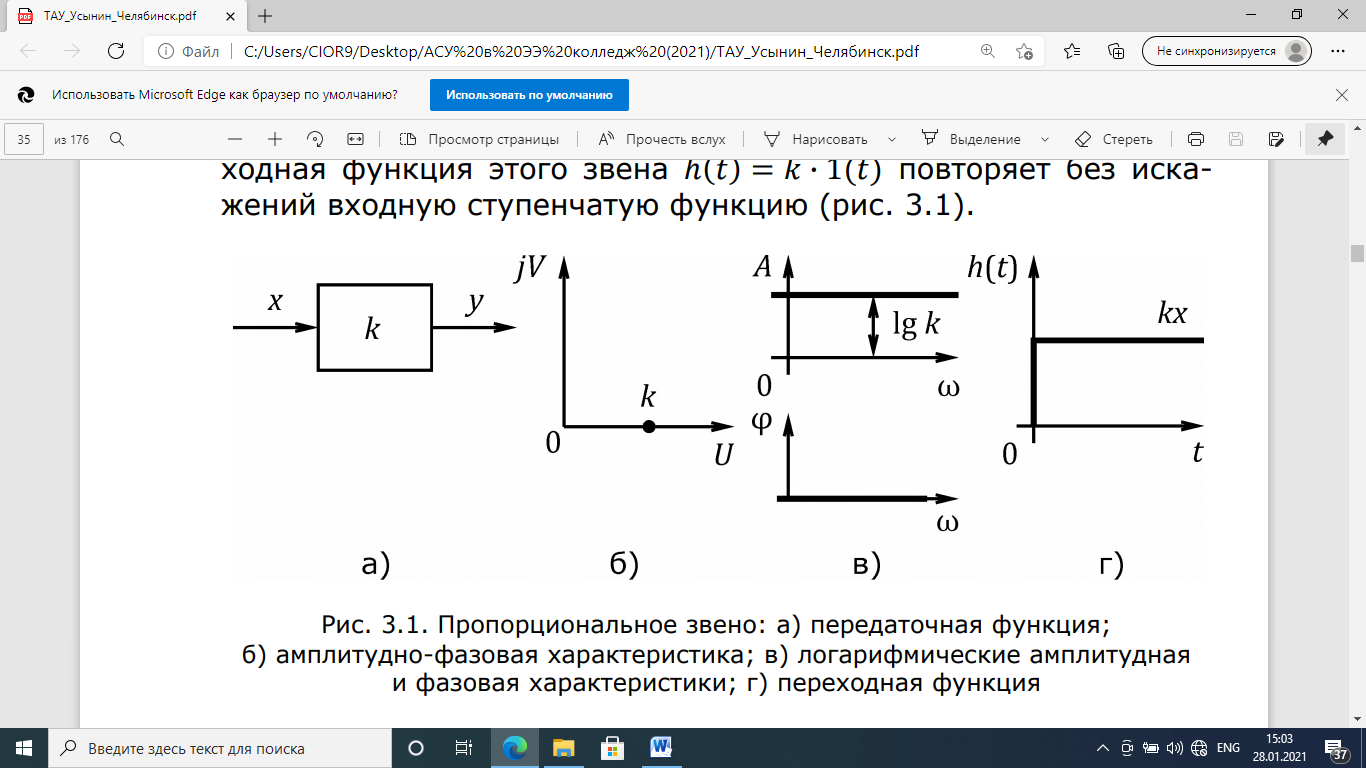
Рис. 3.5. Пропорциональное звено: а) передаточная функция; б) амплитудно-фазовая характеристика; в) логарифмические амплитудная и фазовая характеристики; г) переходная функция
Примерами пропорционального звена
(рис. 3.6) можно назвать делитель напряжения
(потенциометр), механический редуктор,
пропорциональный, или П-регулятор. В
последнем случае операционный усилитель
ОУ, имеющий очень высокий (до нескольких
сотен тысяч) коэффициент усиления,
охвачен схемой, содержащей резисторы
 и
и
 .
В результате регулятор – схема,
представляющая собой совокупность ОУ
и резисторов
и
,
– имеет передаточную функцию вида:
.
В результате регулятор – схема,
представляющая собой совокупность ОУ
и резисторов
и
,
– имеет передаточную функцию вида:
 .
.

Рис. 3.6. Примеры пропорциональных звеньев:
а) потенциометр;
б) механический редуктор; в) П-регулятор
Интегрирующее звено описывается уравнением:

а его передаточная функция
 .
.
Здесь
– коэффициент пропорциональности. Его
величина и размерность определяются
физической природой звена и размерностями
переменных
 и
и
 .
Амплитудно-фазовая частотная характеристика
описывается уравнением
.
Амплитудно-фазовая частотная характеристика
описывается уравнением
 .
.
Логарифмическая амплитудная частотная
характеристика
 интегрирующего звена имеет во всем
диапазоне частот вид наклонной прямой
с единичным отрицательным наклоном
(или –20 дб/декаду), а фазовая
интегрирующего звена имеет во всем
диапазоне частот вид наклонной прямой
с единичным отрицательным наклоном
(или –20 дб/декаду), а фазовая
 – горизонтальной прямой на уровне –90
градусов во всем диапазоне частот.
Переходная функция имеет вид наклонной
прямой с коэффициентом наклона, равным
(рис. 3.7).
– горизонтальной прямой на уровне –90
градусов во всем диапазоне частот.
Переходная функция имеет вид наклонной
прямой с коэффициентом наклона, равным
(рис. 3.7).
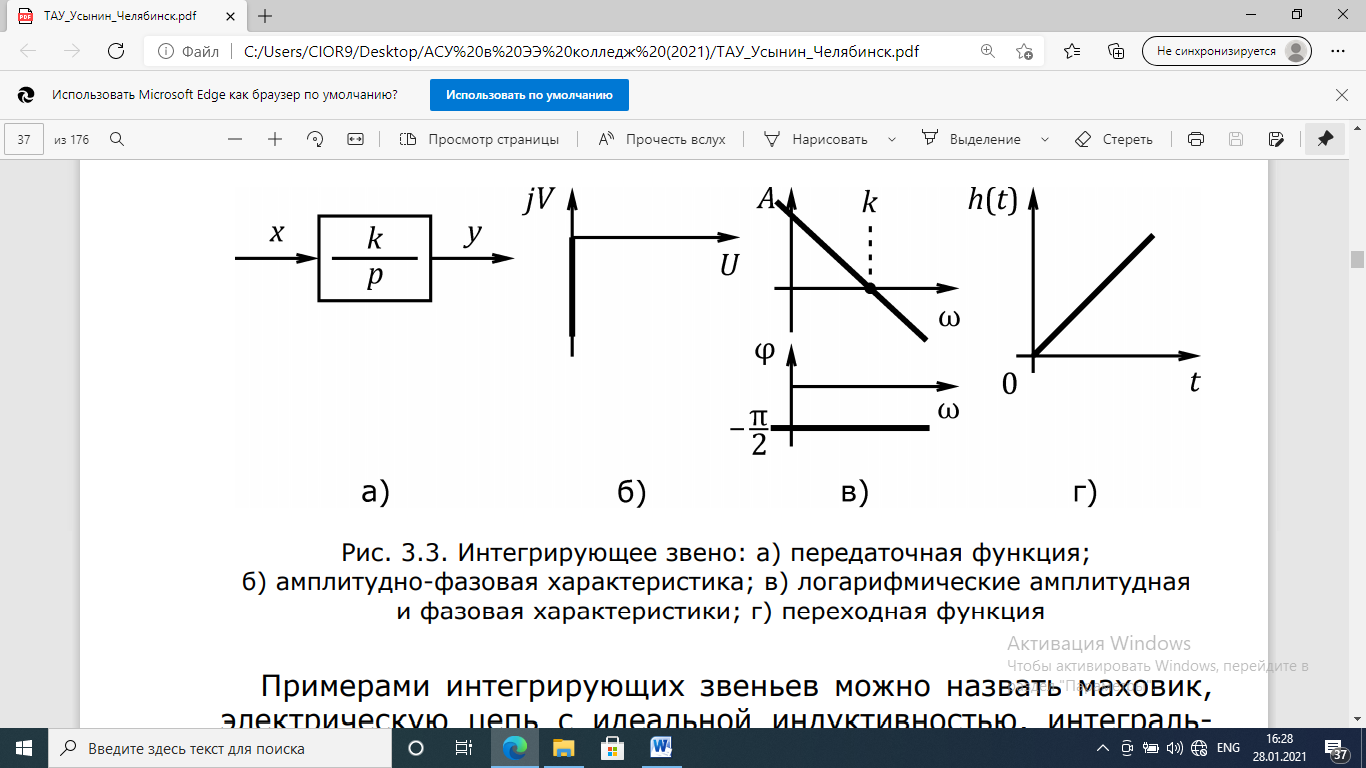
Рис. 3.7. Интегрирующее звено: а) передаточная функция;
б) амплитудно-фазовая характеристика; в) логарифмические амплитудная и фазовая характеристики; г) переходная функция
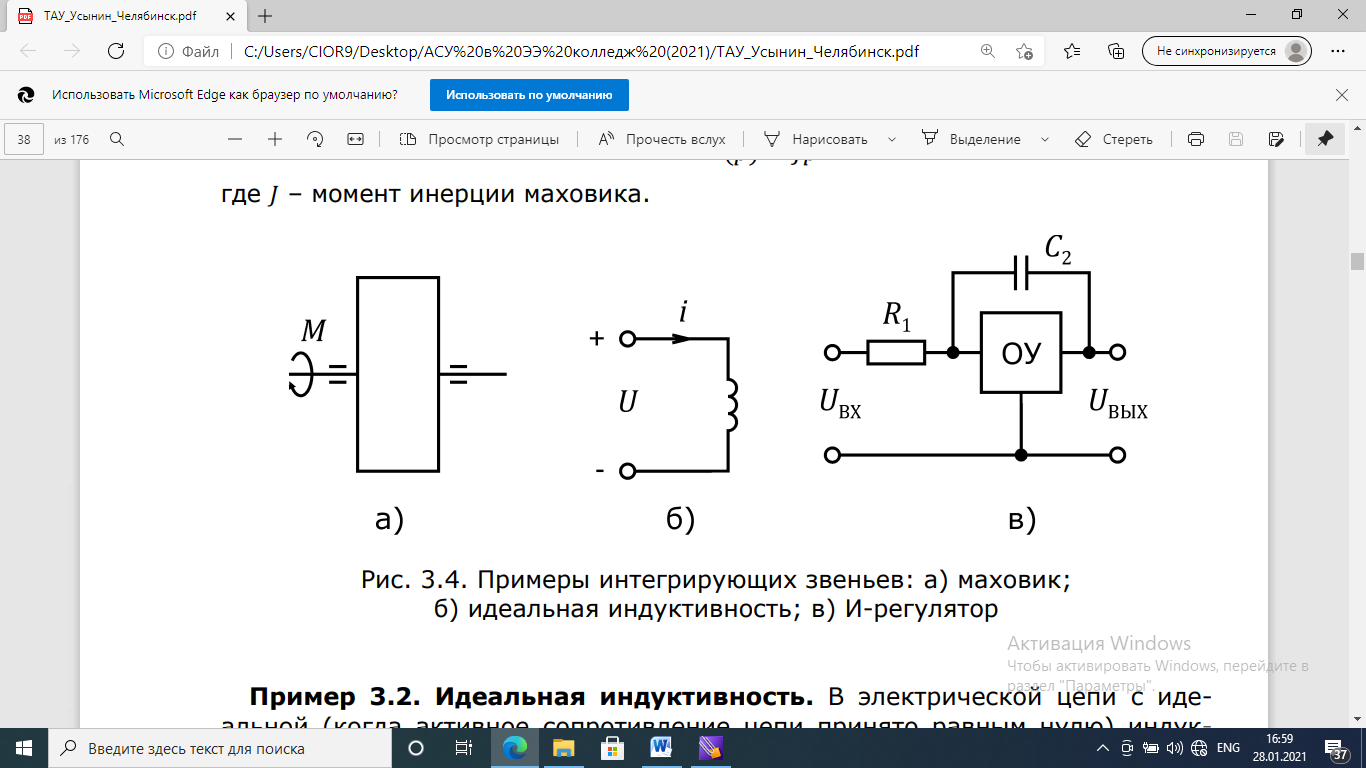 Рис. 3.8. Примеры интегрирующих
звеньев:
Рис. 3.8. Примеры интегрирующих
звеньев:
а) маховик; б) идеальная индуктивность; в) И-регулятор
Пример 3.1. Маховик. Движение
маховика (см. рис. 3.8 а) описывается
уравнением:

а его
передаточная функция по каналу “Вход
вращающий момент M –
выход угловая скорость
 ”
”
где J – момент инерции маховика.
Пример 3.2. Идеальная индуктивность.
В электрической цепи с идеальной (когда
активное сопротивление цепи принято
равным нулю) индуктивностью
 (см. рис. 3.8 б) напряжение
(см. рис. 3.8 б) напряжение
 на входе цепи и выходной ток
на входе цепи и выходной ток
 связаны уравнением
связаны уравнением

а передаточная функция этой цепи
 .
.
Пример 3.3. Интегральный (И-) регулятор (см. рис. 3.8 в). Этот регулятор имеет передаточную функцию

где
 ,
,
 –
входное сопротивление и сопротивление
цепи обратной связи в регуляторе.
–
входное сопротивление и сопротивление
цепи обратной связи в регуляторе.

Рис. 3.9. Примеры интегрирующих звеньев:
а) ОУ в режиме интегрирования;
б) гидравлический демпфер; в) серводвигатель;
г) интегрирующий привод.