

Составление структурной схемы проектируемой сау
Структурная схема проектируемой системы приведена на рис. 13.2.
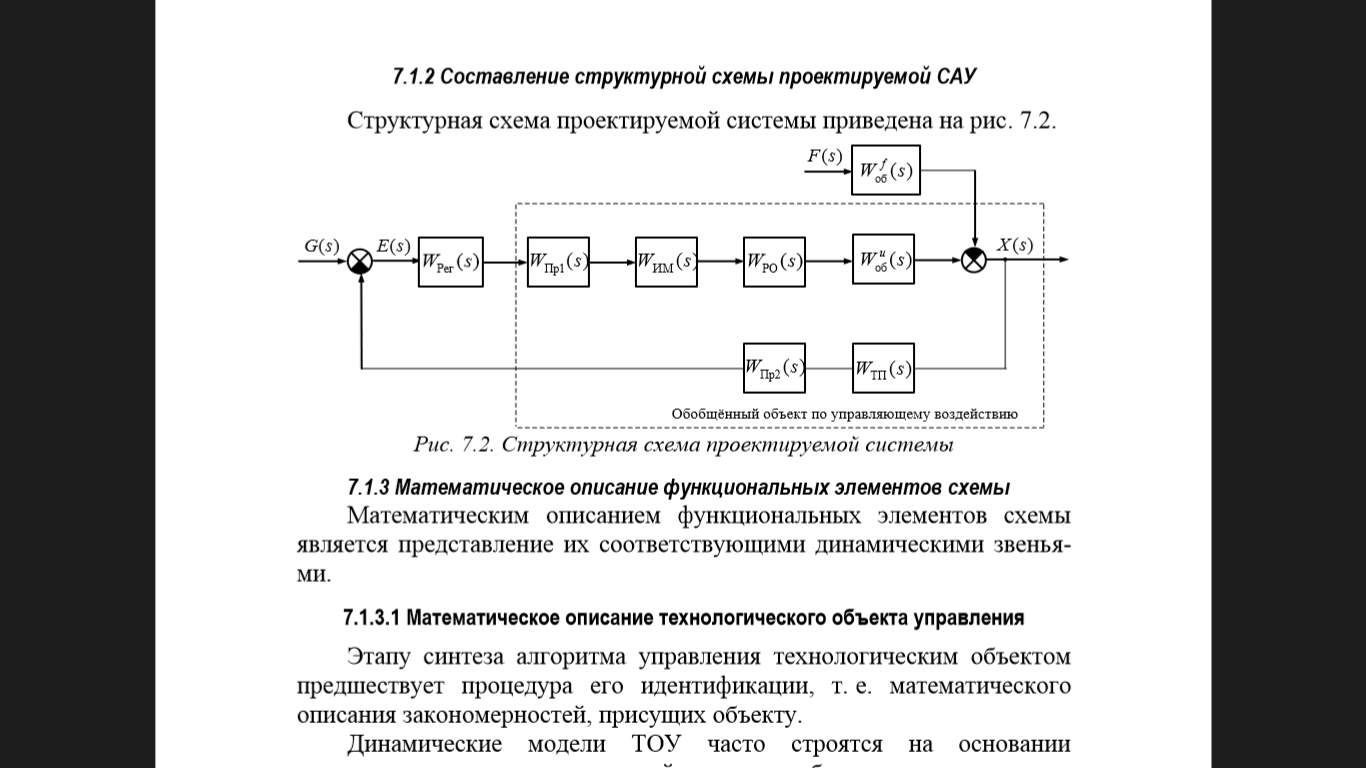
Рис. 13.2. Структурная схема проектируемой системы
Математическое описание функциональных элементов схемы
Математическим описанием функциональных элементов схемы является представление их соответствующими динамическими звеньями.
Математическое описание технологического объекта управления
Этапу синтеза алгоритма управления технологическим объектом предшествует процедура его идентификации, т. е. математического описания закономерностей, присущих объекту. Динамические модели ТОУ часто строятся на основании экспериментальных исследований реакции объекта на ступенчатое входное воздействие. Этот экспериментальный метод определения динамических характеристик промышленного объекта заключается в снятии кривой разгона (экспериментальной переходной функции) – рис. 13.3 и аппроксимации ее решением линейного дифференциального уравнения с постоянными коэффициентами. Для расчета параметров настройки регулятора проектируемой САУ необходима передаточная функция технологического объекта по управляющему воздействию.
Существует большое количество методик определения параметров искомой модели – коэффициентов дифференциального уравнения или передаточной функции исследуемого технологического объекта управления.
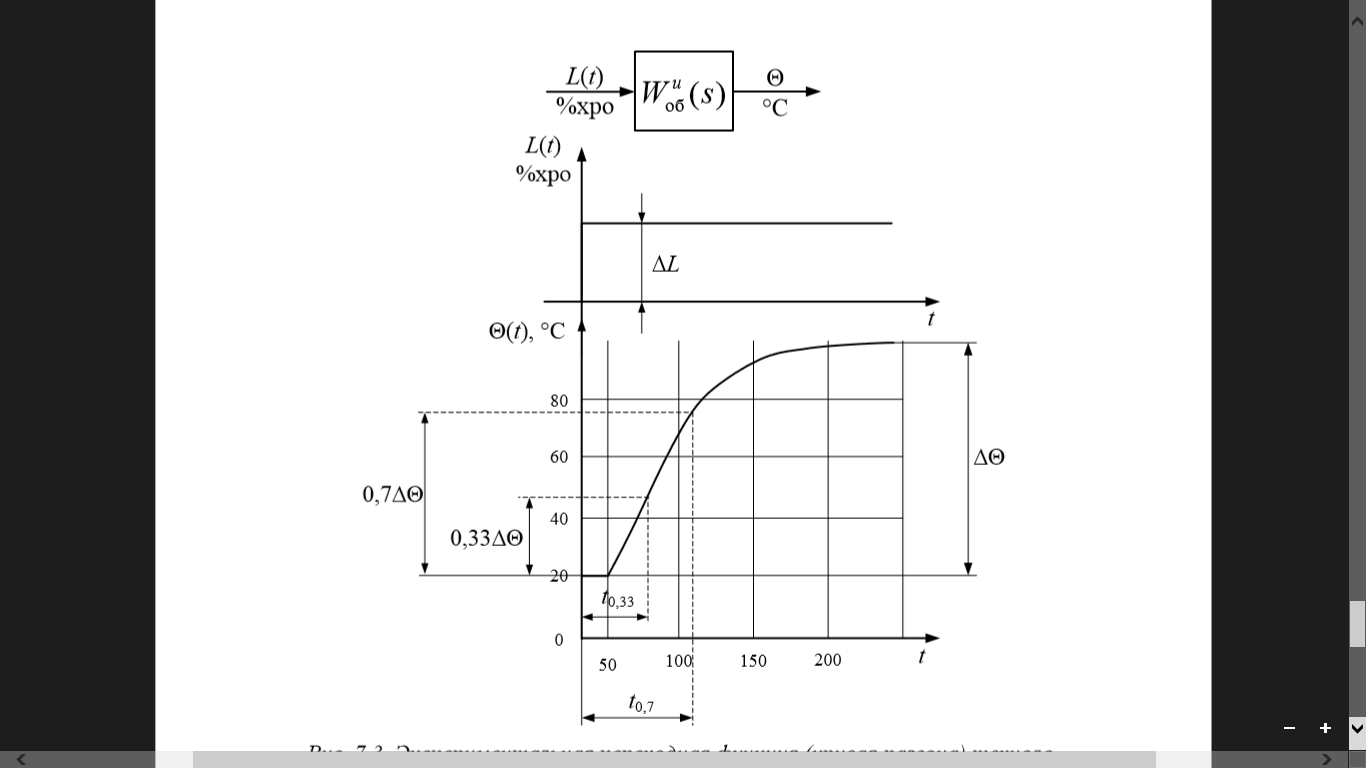
Рис. 12.5. Экспериментальная переходная функция (кривая разгона) технологического объекта управления
Рассмотрим процедуру вычисления параметров модели ТОУ по методу Орманса для объекта, динамические свойства которого описываются инерционным звеном 1 порядка с запаздыванием:
 .
(13.1)
.
(13.1)
 (13.2)
(13.2)
1. Находят коэффициент передачи объекта
 (13.3)
(13.3)
2. Находят по кривой разгона два временных отрезка
 при
при

 при
при
 (13.4)
(13.4)
3. Вычисляют величину запаздывания ТОУ по формуле
 (13.5)
(13.5)
4. Вычисляют величину постоянной времени ТОУ по формуле
 (13.6)
(13.6)
Полученное таким образом дифференциальное уравнение, описывает основное свойство динамической системы – ее инерционность. Целью управления динамическими системами является именно преодоление их инерции.
Динамические свойства промышленных объектов во многих случаях с достаточной точностью могут быть представлены в виде следующих моделей (таблица 13.1).
Таблица 13.1 Типовые математические модели технологических объектов управления с самовыравниванием
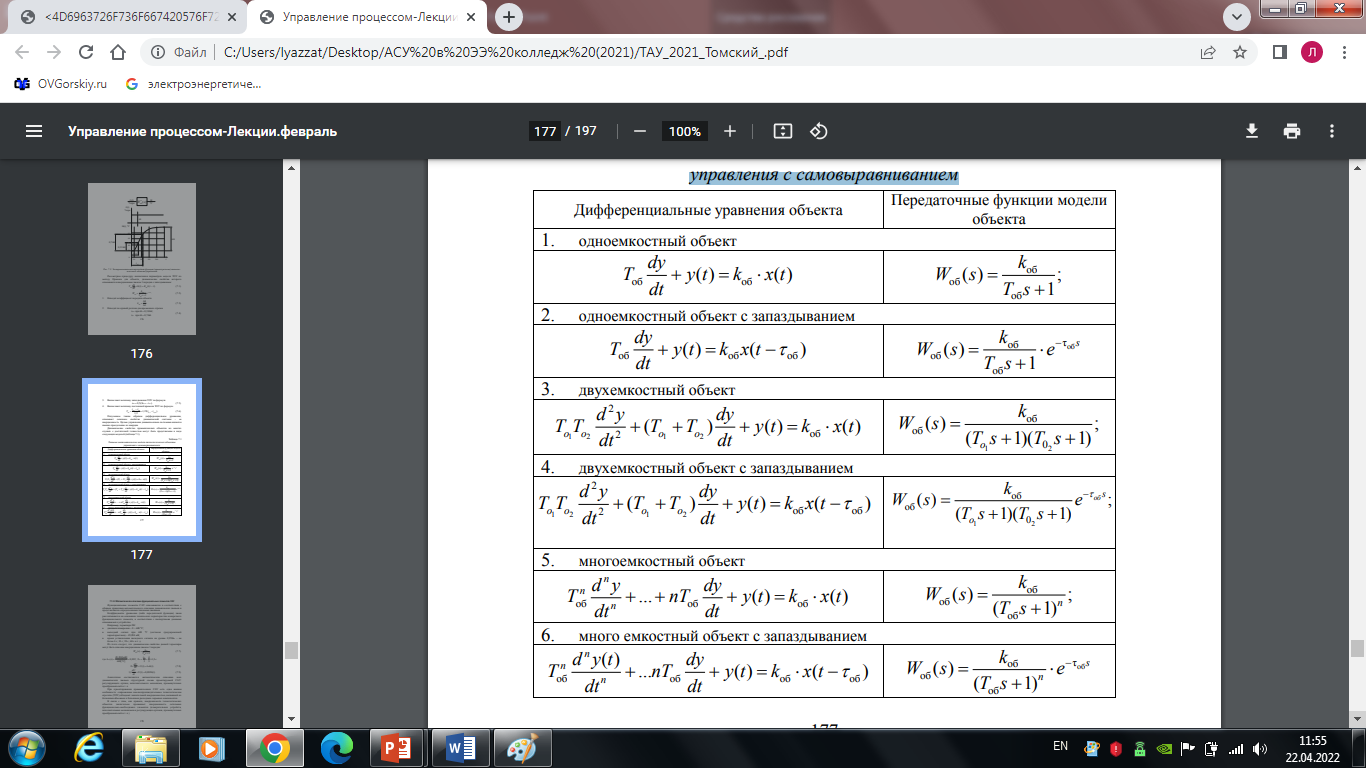
Дифференциальные уравнения объекта: 1. Одноёмкостный объект; 2. Одноёмкостный объект с запаздыванием; 3. Двухёмкостный объект; 4. Двухёмкостный объект с запаздыванием; 5. Многоёмкостный объект; 6. Многоёмкостный объект с запаздыванием.