

Лаба_1
.pdfМинистерство образования Российской Федерации Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» имени В.И. Ульянова (Ленина)
Кафедра автоматики и процессов управления
Лабораторная работа №1
по дисциплине «Адаптивное управление»
на тему:
««Исследование поведения нелинейного объекта и механизмов пассивной адаптации»»
Выполнили: Сафиулин Р.Р
Горбунова А.А.
Кудрявцев М.С.
Группа: 8391
Факультет: КТИ
Проверил: Никонов А.Н.
Санкт-Петербург
2012 год
Лабораторная работа №1
«Исследование поведения нелинейного объекта и механизмов пассивной адаптации»
Цель: отработка навыков численного моделирования с использованием пакета MATLAB Simulink, ознакомление с особенностями динамики нелинейных объектов, изучение механизмов пассивной адаптации на примере системы управления с ПИ-регулятором.
1.Описание объекта управления
Простейший пример нелинейного объекта — шаровая цементная мельница для помола клинкера. В процессе помола клинкер непрерывно подаётся в мельницу, в ней перемалывается и выгружается на выходе. Один из нелинейных эффектов заключается в образовании тромба вследствие перегрузки мельницы материалом. Упрощённая модель подобного процесса описывается уравнениями:
̇ ( ) ( ) ̇( ) ( )
где x — масса загруженного для помола материала [тонн]; u — скорость загрузки клинкера в
мельницу [тонн/час]; y — скорость выгрузки перемолотого материала [тонн/час]; d —
относительная жёсткость клинкера [безразмерный]; (x,d) — |
нелинейная характеристика |
мельницы; — загрузка мельницы в начальный момент времени (начальные условия) [тонн]. |
|
Поведение системы определяется нелинейной характеристикой |
(x,d), жесткостью клинкера |
d , скоростью загрузки u и начальным заполнениеммельницы . |
|
2.Анализ поведения системы
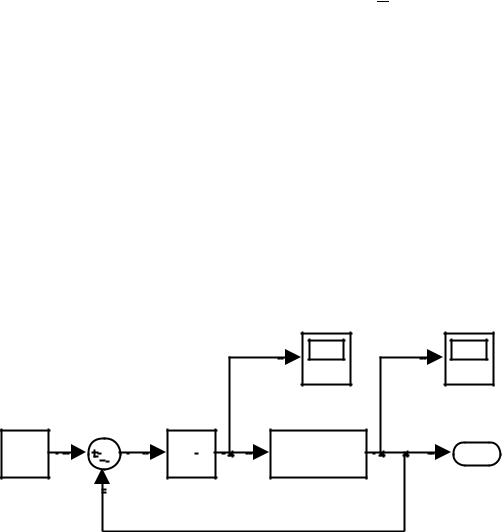
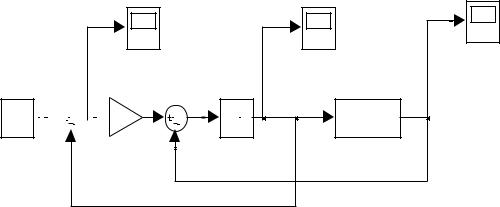
На рисунке 1 представлена математическая модель в программном пакете MATLAB
Simulink. При моделировании системы приняты числовые значения d=1.12 , u= 530 [тонн/час],
=10 [тонн]
|
|
x |
y |
|
530 |
1 |
f(u) |
1 |
|
s |
||||
|
|
Out1 |
||
u |
Integrator |
ф(x,d) |
||
|
Рисунок 1. Математическая модель системы в программном пакете MATLAB Simulink
2
Поиск точек положения равновесия происходит при помощи приравнивания производной к
0, а именно:
( )
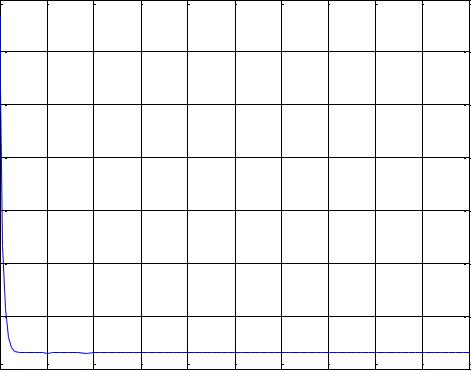
График функции при исходных данных (d=1.12) представлен на рисунке 2.
|
600 |
|
|
|
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
x* |
300 |
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
400 |
450 |
500 |
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
Рисунок 2. График функции |
( |
|
) |
|
|||
|
Как видно из графиков, при d=1.12 график функции не пересекает ось абсцисс, |
|||||||||||
следовательно, в системе отсутствуют точки положения равновесия. |
|
|||||||||||
|
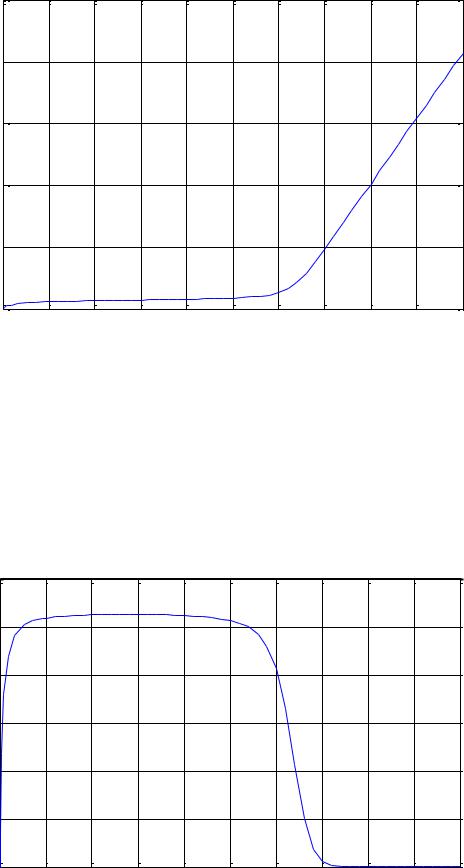
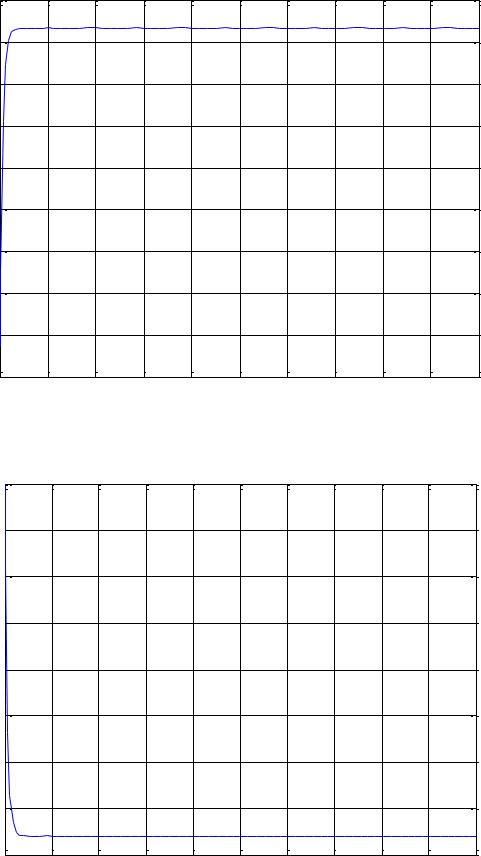
Графики переходных процессов системы по переменным x(масса загруженного для помола |
|||||||||||
материала [тонн]) и y(скорость выгрузки перемолотого материала [тонн/час]) представлены на |
||||||||||||
рисунке 3 и рисунке 4 соответственно. |
|
|
|
|
|
|
||||||
3
2500 |
|
|
|
|
|
|
|
|
|
|
2000 |
|
|
|
|
|
|
|
|
|
|
1500 |
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
00 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
t |
|
|
|
|
|
Рисунок 3. График переходного процесса системы по переменной х (масса для помола материала) |
||||||||||
Как известно из курсов математического анализа: внутренние точки области определения функции, в которых производная равна нулю или не существует,
называются критическими точками этой функции. Условно, в этих точках функция меняет знак,
то есть это и есть точки положения равновесия. Так как при исходных данных производная функции положительная и не равна 0, мы может объяснить поведение графика, представленного на рисунке 3: график монотонно возрастает.
|
600 |
|
|
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
y |
300 |
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
00 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
t |
|
|
|
|
|
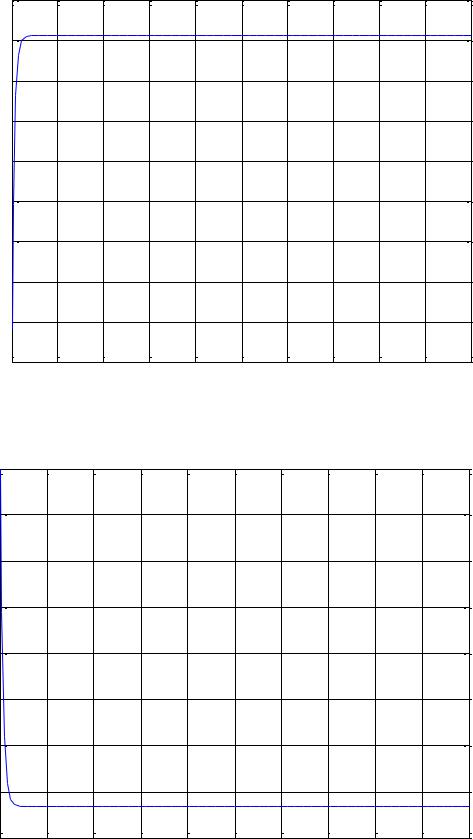
Рисунок 4. График переходного процесса системы для переменной у (скорость выгрузки |
|||||||||||
|
|
|
|
перемолотого материала) |
|
|
|
|
|||
Как было сказано ранее:
4
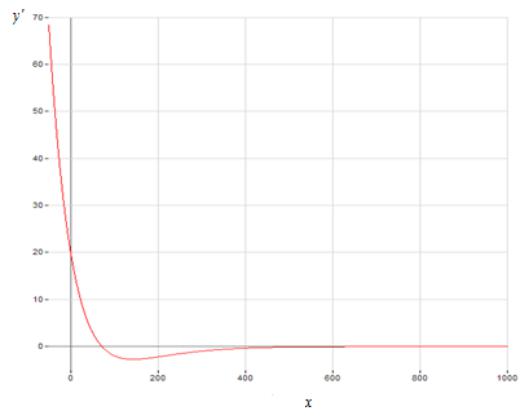
( |
) ( |
) |
|
|
|
|
|||
Производная данной функции ̇ |
( |
) имеет график, представленный на |
||
рисунке 5. |
|
|
|
|
Рисунок 5. График производной функции y
Аналогично рассуждениям, представленными к рисунку 3, объясняем поведение функции представленной на рисунке 4.
Анализ системы при вариации параметра d представлен в таблице 1.
Таблица 1
Значение параметра d |
Количество точек положения равновесия |
|
|
0.5 |
2 |
|
|
1 |
2 |
|
|
1.1 |
2 |
|
|
1.11 |
Точка бифуркации |
|
|
1.12 |
0 |
|
|
1.2 |
0 |
|
|
2 |
0 |
|
|
2.5 |
0 |
|
|
5

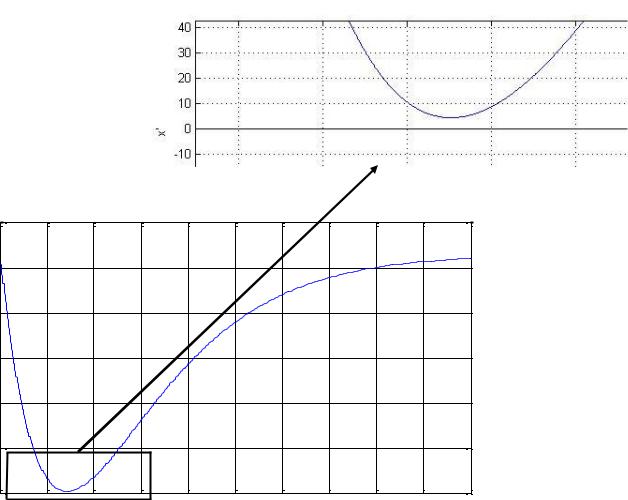
Заметим, что при исходном значении d, в системе отсутствуют положения равновесия. Из таблицы видно, что при значениях d<1.1 у объекта появляются 2 точки равновесия. Далее рассмотрим модель объекта при d=1. На рисунке 6 представлен график функции ̇при d=1.
600 
500 


400
300
x*
200
100
X: 48.73X: 122.4
Y: 0.0005236Y:- .07931
0 



-1000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
200 |
300 |
400 |
500 |
600 |
700 |
800 |
900 |
1000 |
||||||||||
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6. График функции ̇ |
( |
) |
|
|
|
|
|
|||||||||||
Из графика видно, что существуют 2 точки, при которых |
̇ |
: |
|
|
|
|
|||||||||||||
x1=48.73[тонн], x2=122.4[тонн].
3. Линеаризация объекта
Далее производим линеаризацию объекта управления в окрестности точки равновесия, но
сначала необходимо выяснить какое из положений равновесия устойчиво.
Данная процедура производится при помощи первого метода Ляпунова. Метод применяется для исследования устойчивости по линеаризованным уравнениям для малых вариаций
переменных.
Вектор координат исследуемого положения равновесия:
x1=48.73[тонн], x2=122.4[тонн].
Положим, что функция допускает разложение в степенной ряд в точках положения
равновесия. Пренебрегая малыми высшего порядка по сравнению с малыми вариациями ,
Получим вместо уравнения ̇линеаризованную систему А( ) , где А матрица первых производных нелинейных функций (матрица Якоби),
вычисляемые в точке равновесия.
6
( |
|
) |
( |
) ( |
|
))| ( |
) |
||||
|
|
||||||||||
|
|
|
|
|
| |
( |
|||||
|
|
|
|
|
|||||||
Далее находим матрицу А для каждого положения равновесия: |
|
||||||||||
|
|
|
|
А1 = ( |
|
( |
))| |
= -4.25 |
|
||
|
|
|
|
А2 = ( |
|
( |
))| |
= 2.31 |
|
||
Первый метод Ляпунова базируется на том, |
что об устойчивости «в малом» положения |
||||||||||
равновесия нелинейной системы можно судить по результатам анализа линеаризованной системы:
Если все собственные значения матрицы А имеют отрицательные действительные части,
т.е. линеаризованная система устойчива асимптотически, то положение устойчиво.
Если линеаризованная система неустойчива, то положение равновесия неустойчиво.
Следовательно, при положение равновесия устойчиво, при положение
равновесия неустойчиво.
Далее можно сделать вывод по о том что все собственные значения матрицы А имеют отрицательные действительные части (в данном случае один корень), т.е. линеаризованная система устойчива асимптотически, то положение устойчиво.
4. Синтез системы управления с П-регулятором
На рисунке 7 представлена математическая модель в программном пакете MATLAB Simulink
системы с П регулятором.
e
48.73 


 -K-
-K-
Constant  Gain
Gain
|
x |
y |
|
|
|
1 |
|
f(u) |
s |
|
|
|
|
|
Integrator |
|
ф(x,d) |
Рисунок 7. Математическая модель в программном пакете MATLAB Simulink системы с П-
регулятором.
Графики переходного процесса ошибки, массы загруженного для помола материала и скорости выгрузки перемолотого материала представлены соответственно на рисунке 8, рисунке 9,
рисунке 10.
Изначально система рассматривается с П-регулятором, усиление которого равно1.
7
|
|
|
График переходного процесса ошибки |
|||||||
47 |
|
|
|
|
|
|
|
|
|
|
46 |
|
|
|
|
|
|
|
|
|
|
45 |
|
|
|
|
|
|
|
|
|
|
44 |
|
|
|
|
|
|
|
|
|
|
43 |
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
42 |
|
|
|
|
|
|
|
|
|
|
41 |
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
39 |
|
|
|
|
|
|
|
|
|
|
380 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
t |
|
|
|
|
|
|
|
Рисунок 8. График переходного процесса ошибки |
|
|
||||||
|
|
|
График переходного процесса загрузки мельницы |
||||||||
|
10 |
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
x |
6 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
20 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
t |
|
|
|
|
|
Рисунок 9. График переходного процесса системы по переменной х (масса для помола материала) |
|||||||||||
8
|
График переходного процесса скорости выгрузки мельниц |
|||||||||
180 |
|
|
|
|
|
|
|
|
|
|
160 |
|
|
|
|
|
|
|
|
|
|
140 |
|
|
|
|
|
|
|
|
|
|
120 |
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
400 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
t |
|
|
|
|
|
Рисунок 10. График переходного процесса системы для переменной у (скорость выгрузки |
||||||||||
|
|
|
перемолотого материала) |
|
|
|
|
|||
Целесообразно стабилизировать неустойчивое положение равновесия, поэтому рассмотрим систему в точке положения равновесия x1 = 122.4[тонн]
Графики переходного процесса ошибки, масса загруженного для помола материала и скорость выгрузки перемолотого материала представлены соответственно на рисунке 11 рисунке
12, рисунке 13.
Изначально система рассматривается с П-регулятором, усиление, которого равно 1.
9
|
|
|
|
График переходного процесса ошибки |
|||||||
116.5 |
|
|
|
|
|
|
|
|
|
|
|
116 |
|
|
|
|
|
|
|
|
|
|
|
115.5 |
|
|
|
|
|
|
|
|
|
|
|
115 |
|
|
|
|
|
|
|
|
|
|
|
114.5 |
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
114 |
|
|
|
|
|
|
|
|
|
|
|
113.5 |
|
|
|
|
|
|
|
|
|
|
|
113 |
|
|
|
|
|
|
|
|
|
|
|
112.5 |
|
|
|
|
|
|
|
|
|
|
|
112 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
Рисунок 11. График переходного процесса ошибки |
|
|
|||||||
|
|
|
|
График переходного процесса загрузки мельницы |
||||||||
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
9.5 |
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
8.5 |
|
|
|
|
|
|
|
|
|
|
|
x |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
7.5 |
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
6.5 |
|
|
|
|
|
|
|
|
|
|
|
|
60 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
Рисунок 12. |
График переходного процесса системы по переменной х (масса для помола |
|||||||||||
материала)
10