

2. Силы, действующие на ракету в полете
В полете на ракету действует
следующая система сил: полная
аэродинамическая сила
 ,
тяга реактивного
двигателя
,
тяга реактивного
двигателя
 и сила тяжести
и сила тяжести
 .
.
Аэродинамической силой называется сила взаимодействия воздуха с движущимся в нем телом. Она создается в результате неравномерного разрежения и сжатия воздушного потока около различных частей ракеты (движущегося тела), а также в результате вязкости воздуха и возникающего при этом трения его частиц о поверхность ракеты. Величина и направление аэродинамической силы зависят от размеров, формы и скорости ракеты, ориентации ее в воздушном потоке и физических параметров атмосферы.
Суммарное воздействие
потока воздуха на ракету можно привести
к одной силе
 ,
называемой полной
аэродинамической силой.
,
называемой полной
аэродинамической силой.
Полная аэродинамическая
сила приложена к
ракете в точке, называемой центром
давления и не совпадающей, как правило,
с центром масс ракеты. Для анализа силу
 целесообразно привести
к центру масс ракеты. Тогда воздействие
набегающего потока на ракету сводится
к полной аэродинамической силе
целесообразно привести
к центру масс ракеты. Тогда воздействие
набегающего потока на ракету сводится
к полной аэродинамической силе
 и полному аэродинамическому
моменту
и полному аэродинамическому
моменту
 .
.
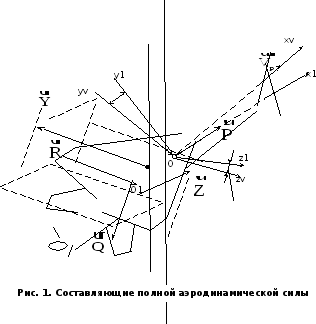
Полная аэродинамическая
сила
 для удобства исследования
разлагается на три составляющие -
проекции на оси скоростей системы
координат oxvyvzv.
Проекция полной
аэродинамической силы на ось оху
всегда направлена в
сторону, обратную вектору скорости, и
называется силой
лобового сопротивления
для удобства исследования
разлагается на три составляющие -
проекции на оси скоростей системы
координат oxvyvzv.
Проекция полной
аэродинамической силы на ось оху
всегда направлена в
сторону, обратную вектору скорости, и
называется силой
лобового сопротивления
 (рис.
1). Проекция на ось oyv
называется подъемной
силой
(рис.
1). Проекция на ось oyv
называется подъемной
силой
 ,
а проекция на ось ozv
- боковой силой
,
а проекция на ось ozv
- боковой силой

Нормальные силы (подъемная и боковая) изменяют направление полета зенитной управляемой ракеты, искривляют ее траекторию, являясь, таким образом, управляющими силами.
Условия возникновения и влияния на полет ракеты подъемной и боковой сил аналогичны.
Подъемная сила
 зенитной
управляемой ракеты в основном создается
крылом, в меньшей степени рулями и
корпусом ракеты. Для ее определения
используется формула
зенитной
управляемой ракеты в основном создается
крылом, в меньшей степени рулями и
корпусом ракеты. Для ее определения
используется формула
 ,
,
где
 -коэффициент подъемной
силы;
-коэффициент подъемной
силы;
- плотность воздуха;
Vp - скорость полета ракеты;
 - характерная площадь.
- характерная площадь.
Коэффициент подъемной силы при заданных конструктивных параметрах и аэродинамической компоновке ракеты в основном зависит от отношения скорости полета к скорости звука в данных условиях (числа М), угла атаки ракеты и угла отклонения рулей высоты В, т. е.
Зенитные управляемые ракеты имеют такую аэродинамическую форму, при которой при отсутствии угла атаки подъемная сила равна нулю:
 (1)
(1)
где
 ,
, - коэффициенты пропорциональности,
характеризующие приращение коэффициента
подъемной силы при изменении соответственно
угла атаки и угла отклонения рулей
высоты на единицу и зависящие от числаМ.
- коэффициенты пропорциональности,
характеризующие приращение коэффициента
подъемной силы при изменении соответственно
угла атаки и угла отклонения рулей
высоты на единицу и зависящие от числаМ.
По расположению крыльев и рулей различают следующие аэродинамические схемы ЗУР: нормальная 1 и 2, «утка» 3, «поворотное крыло» 4 (рис. 2).
В нормальной схеме рули располагаются позади крыльев в хвостовой части ракеты. При такой компоновке ЗУР подъемная сила, вызванная отклонением рулей, вычитается из подъемной силы корпуса и крыльев [в формуле (1) берется знак минус]. Происходит некоторая потеря управляющей силы, связанная с балансировкой ракеты.

Стремление получить значительную площадь крыльев при небольшом их размахе приводит к увеличению бортовой хорды, крыла. При этом рули оказываются расположенными непосредственно за крыльями и связываются с ними конструктивно. Такую разновидность нормальной схемы принято называть «бесхвосткой» 2.
В схеме «утка» рули располагаются впереди крыльев. При такой компоновке ракеты подъемная сила рулей совпадает по направлению с подъемной силой крыльев и корпуса [в формуле (1) берется знак плюс]. Однако расположение рулей в носовой части ракеты и возникновение скоса воздушного потока на них приводит к потере подъемной силы на крыльях. Поэтому схема «утка» с точки зрения потерь подъемной силы практически не имеет преимуществ перед «нормальной» схемой. Кроме того, скос воздушного потока на рулях обусловливает возникновение значительных моментов крена. Несмотря на эти недостатки, схема удобна в компоновке и может применяться в ракетах.
В схеме «поворотное крыло» функции крыльев и рулей выполняют одни и те же аэродинамические поверхности; в хвостовой части могут располагаться неподвижные поверхности, выполняющие роль стабилизаторов.
Характер зависимости
коэффициента
 от числаМ показан
на рис. 3.
от числаМ показан
на рис. 3.
При фиксированных числах М коэффициент подъемной силы линейно возрастает с увеличением угла атаки до его некоторого критического значения. При угле атаки больше критического происходит срыв воздушного потока и коэффициент Су резко уменьшается.
Зная коэффициенты
 ,
, скорость, высоту полета и угол атаки
ракеты, можно определить величину
подъемной силы:
скорость, высоту полета и угол атаки
ракеты, можно определить величину
подъемной силы:
 Рис.
3. Зависимость
коэффициента
Рис.
3. Зависимость
коэффициента
 от числаМ
от числаМ
или
Введем новые обозначения:
 и
и
Тогда:

Следовательно, для заданной ракеты подъемную силу можно считать функцией четырех параметров: скорости ракеты, высоты полета, угла атаки и угла отклонения рулей.
Сила лобового сопротивления Q создается сопротивлением воздушного потока движению всех элементов ракеты (корпуса, крыла, рулей и др.) и вычисляется по формуле

где
 —
коэффициент лобового сопротивления.
—
коэффициент лобового сопротивления.
Коэффициент
 зависит в основном
от числа М, угла
атаки и угла скольжения ракеты:
зависит в основном
от числа М, угла
атаки и угла скольжения ракеты:

или

Если эту функцию разложить
в ряд Тейлора в окрестностях нулевых
значений углов
и
то коэффициент
 можно представить в
следующем виде:
можно представить в
следующем виде:

При заданных углах
и
наиболее интенсивный рост коэффициента
 наблюдается при
приближении числа М
к единице (рис, 4). Это
объясняется формированием на ракете
местных и головного скачков уплотнения,
создающих так называемое волновое
сопротивление. При
наблюдается при
приближении числа М
к единице (рис, 4). Это
объясняется формированием на ракете
местных и головного скачков уплотнения,
создающих так называемое волновое
сопротивление. При
 коэффициент
коэффициент
 убывает, так как скачки уплотнения
становятся косыми и оказывают меньшее
сопротивление движению ракеты.
убывает, так как скачки уплотнения
становятся косыми и оказывают меньшее
сопротивление движению ракеты.
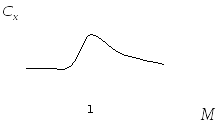
Рис.
4. Зависимость коэффициента
 от
числа М
от
числа М
Таким образом, при заданной конструкции и аэродинамической компоновке ракеты силу лобового сопротивления можно приближенно считать функцией четырех параметров: скорости Vр, высоты полета Нр, угла атаки и угла скольжения :

С увеличением скорости, углов атаки и скольжения ракеты сила лобового сопротивления растет, а с увеличением высоты уменьшается.
При расчетах, требующих большой точности, необходимо также учитывать приращение силы лобового сопротивления за счет отклонения рулей и элеронов ракеты.
Сила тяги Р создается двигателем и направлена вдоль продольной оси ракеты. Ее значение определяется по формуле
 (2)
(2)
где
 - секундный расход топлива;
- секундный расход топлива;
 - скорость истечения
газов из сопла двигателя;
- скорость истечения
газов из сопла двигателя;
 - ускорение свободного падения;
- ускорение свободного падения;
 - давление газа в выходном сечении сопла;
- давление газа в выходном сечении сопла;
 - атмосферное давление
на высоте;
- атмосферное давление
на высоте;
Sвых - площадь выходного сечения сопла.
Обозначив через
 атмосферное давление
на поверхности земли, прибавим и вычтем
в формуле (2)
атмосферное давление
на поверхности земли, прибавим и вычтем
в формуле (2)
 :
:

После преобразования получим
 (3)
(3)
Первые два слагаемых правой
части этой зависимости (3) характеризуют
величину тяги
 двигателя на земле, а третье слагаемое
- приращение тяги по мере увеличения
высоты.
двигателя на земле, а третье слагаемое
- приращение тяги по мере увеличения
высоты.
Тогда

Приращение тяги ракетного
двигателя по мере увеличения высоты
при одном и том же секундном расходе
топлива незначительно и не превышает
10 -12%
 .
.
Двигательная установка зенитной управляемой ракеты может включать не только маршевый двигатель, но и стартовый ускоритель. Разгон ракеты осуществляется большой силой тяги, во много раз превосходящей вес ракеты, После сброса ускорителей или окончания первого режима работы маршевого двигателя полет ракеты происходит под действием значительно меньшей силы тяги. При этом для получения наилучших характеристик зенитного ракетного комплекса сила тяги маршевого двигателя может регулироваться по программе, устанавливаемой до старта ракеты с учетом конкретных условий стрельбы. Регулирование тяги обеспечивается изменением секундного расхода топлива.
Сила тяжести
 ,
равная произведению массы ракеты на
ускорение силы тяжести, при полете
ракеты на активном участке траектории
постепенно убывает за счет выгорания
топлива. Для любого момента времени
сила тяжести ракеты определяется по
формуле
,
равная произведению массы ракеты на
ускорение силы тяжести, при полете
ракеты на активном участке траектории
постепенно убывает за счет выгорания
топлива. Для любого момента времени
сила тяжести ракеты определяется по
формуле

где
 - начальный вес ракеты;
- начальный вес ракеты;
t - время работы двигательной установки.