

35. Мостовые методы измерения параметров компонентов цепей. Четырехплечие измерительные мосты для измерения r,l,c.
Идея-уравновеш мостовой схемы с неизв компл сопротивл путем подбора образцов сопротивл.
Существует несколько разновидностей мостовых схем измерения параметров R,L,C на переменном токе: четырехплечие, шестиплечие (двойные), уравновешенные, неуравновешенные и процентные. Управление этими мостами может быть как ручным, так и автоматическим. Наиболее распространены схемы четырехплечих уравновешенных мостов.
Схема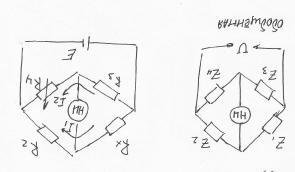
К одной из диаг моста подвед синусоид напряж от генератора. Индикатор регистрир напряж, возник в друг диаг моста. Искомое полн сопротивл вводят в одно из плеч моста. Мост уравновеш. Сост баланса фиксир по нулевому показ индикатра-уравновеш мост.
НН показ, когда точки а и в имеют одинак потенциалы.
Сопротивления четырехплечевого моста в общем случае носят комплексный характер:Z̊1=Z1exp(jφ1) и т.д., где Z1,Z2,Z3,Z4 – модули комплексных сопротивлений, а φ1-4 – их соответствующие фазы.
Условия равновесия четырехплечного моста определяются равенствами: Z1Z4=Z2Z3 и φ1+φ4=φ2+φ3
Надо как миним 2 парам варьировать. Все варианты мостов имеют цель получить наилучшую точность, высокую чувствит к регулировке.
Для R:
Rx=(R3/R4)(длительное)*R2(плавное) можно регулир R4, a R2,R3-опред диапазон. Точность-доли%.
При переходе к точке нуля меняется полярность тока.
Погрешность метода: погр установки образц рез, погр установки нуля.
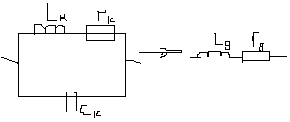
Для достижения равновесия четырехплечного моста с активным сопротивлением достаточно иметь один регулируемы параметр (например, сопротивление резистора R4) как показано на рисунке. Пределы измеряемых сопротивлений для подобных мостов составляют от 10^-2 до 10^7 Ом. Погрешности измерения – от сотых долей процента до нескольких процентов в зависимости от диапазона измерения.
Наименьшие погрешности лежат в диапазоне измерений от 100 Ом до 100 кОм. При малых измеряемых сопротивлениях резисторов вклад в погрешность измерения вносят сопротивления отдельных соединительных проводов, при больших - сопротивления утечек.
Д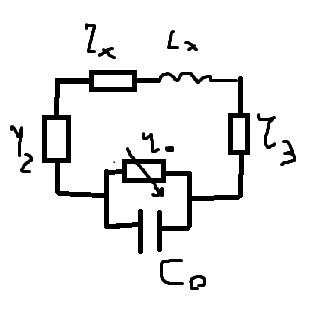 ля
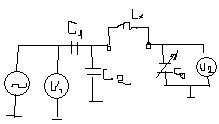
L:
ля
L:
(Rx+jwLx)*1/(1/Ro)*+jwCo=R2*R3
Rx=R2*R3/Ro
wLx=R2*R3*wCo
Lx=R2*R3*Co
R2*R3 – коэф пропорциональности
QLx = wLx/Rx = wCoR2R3RO/R2R3 = wCoRo
Т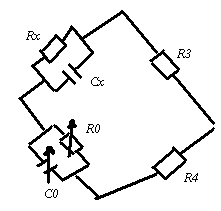 акая
схема наиб удобна, тк надо менятьR0C0(а неL0,R0
как можно было бы сделать)
акая
схема наиб удобна, тк надо менятьR0C0(а неL0,R0
как можно было бы сделать)
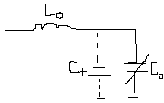
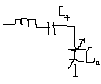
Для С:
Tgδ=G/B=1/(Rx*w*Cx)
(1/R0 +i*w*C0)^(-1)R3=R4/(1/Rx +i*w*Cx)
i*w*C0*R4+R4/R0= i*w*Cx*R2+R2/Rx
Отсюда: Rx=R0R3/R4
Cx=C0R4/R3
Tg=1/(Rx*w*Cx)= 1/(R0*w*C0)
Достоинства: высок чувствит, высок стабильность при измер мостовым методом, можно использ эталонные Эл-ты.
Недост: метод узкополосный, образц Эл-ты имеют частотн зависим, на высок част возник перекрестн.связи между плечами, у моста нет баланса.
36. Трансформаторные мосты, их использование для измерения полных сопротивлений.
Применяют в широком диапазонечастот- до сотен МГц. Отсутствие паразитных связей в схеме, хорошая защищенность от помех, возможность автоматиз.
В таких мостах плечи образованы обмотками трансформаторов, поэтому их иногда называют трансформаторными мостами. Трансформаторные мосты выполняют по разным схемам.
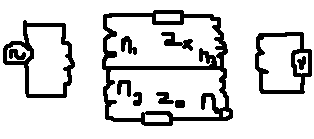
Один из вариантов:
(1ое) n
Трансформатор напр(ХХ)-ист напр
Трасф тока(в реж кз)-малые сопрот обмоток
Сильная индуктивн связь между обмотками и переменное число витков(коммутатор)
U1/U2=n1/n2
Числа витков выполн услов равновес n4I0=Ixn3 магнитн поток =Ø и напряж на вторичн обмотке =Ø
I0=U2/Z0 Ix=U1/Zx – при пренебрежимо малом сопротивл обмоток n3 n4
Zx=Z0*(n1n3/n2n4)
Число обводок можно сдел большим-диапазон измер увелич(до 10^7), погрешн опред точностью Z0 и точн уравновешив.

Напряжение питания U от генератора G подводят к первичной обмотке w1 трансформатора Т1. К его вторичным обмоткам w2 и w7 присоединены измеряемый конденсатор с потерями (Сх и Rx) и образцовые элементы C0 и R0, соединенные с первичными обмотками w6 и w5 трансформатора Т2. Сигнал ошибки Uвых снимают с его вторичной обмотки w4.
Если
не учитывать индуктивностей обмоток,
то получим токи ![]() ;
;
![]() ;
;
![]()
Условие баланса моста (Uвых=0) получается при равенстве нулю магнитного потока в сердечнике трансформатора Тр2, т.е. при выполнении условия I3w3=I5w5+I6w6. Подставив сюда значения токов после выделения действительной и мнимой частей равенства, получим: Rx=R0w2w3/(w7w6); Cx=C0w7w5/(w2w3); tgδ=w6/(w5ωR0C0)
Для индуктивности направл тока меняем знак w7=-w7’
Проблема-чтобы U1 и U2 не зависили от измеряемой величины. Делается с помощью операцион усилителей с преобразованием сопротивл(проводим) в напряж. Трансформ напряж не нужен.
Такие мосты уравновешивают, изменяя параметры образцовых элементов или число витков трансформаторов. На основе трансформаторных мостов строят цифровые мосты с автоматической балансировкой. Метод трансформаторного моста реализован в выпускаемых промышленностью приборах, позволяющих измерять L,C,R и tgδ с основной погрешностью не менее 0.1% на частоте 1 кГц в широком диапазоне значений измеряемых параметров.
37. Резонансные методы измерения параметров компонентов цепей. Действующие значения индуктивности катушки и емкости конденсатора и методы их измерения. Погрешности резонансного метода.
Основа метода -вкл послед элемента в резонансн контур. Добиваясь услов резон, получ знач для расч L C R. Измер действующ знач эл-та.
Cx-паразитная емкость м/ду витками
iwCk+1/(iwLk+rk)=1/(iwLg+rg)
(iwLk+rk)/(iwCkrk+1-w^2CkLk)=iwLg+rg
При rg<<1
Lg=Lk/(1-w^2CkLk)
rg=rk/(1-w^2CkLk)
f0=1/2π√LkCk
Вывд-измер Lк надо делать многочастотн методом-измерять на 2, 3 частотах Lg и расчетным путем опред Lк(и Ск)
Аналогично у конденсаторов.
Резон метод-измер косвенные путем помеш измеряемого элемента в резонансн контур и путем установки резонанса добиваемся простых условий. Измерение индуктивн-косвен метод.
V2-высокочаст вольтметр сRвх↑Свх↓(амплит вольтм с закрытым вход)
Метод: 1.устанавлив частоту(на котор Lg=Lk)
2.меняя емкость образц конденсатора, настраиваем в резонанс показан вольтметра(макс). Фиксируем С0
3.расчет
![]()
4.добротность катушки – по V2/V1 или V1-const – V2-градуир в Q-это добротность контура! ≈Q2
Погрешности:
1.погрешность градуировки образц конденс
2.погр установки частоты генер
3.погр фиксации момента резонанса(завис от чувствит вольтметра, от добротн всего контура)
Метод пригоден для цепей с малыми потерями.

Измерение емкость-метод замещения
Подключ образц нагрузку с Q↑(ее индуктивность должна быть резонанс с Со)
Находим Со1. Затем подключ парал-но Сх(для малых Сх) и находим второй резонанс Со2
Сх=Со1-Со2
Для больших Сх
 Сх=Со1Со2/Со2Со1
Сх=Со1Со2/Со2Со1
Tgδопред расчетным путем изменения добротностиQ1-Q2-меньше за счет потерь в Сх
Погрешн те же, ктоме установки частоты-она влияет только на расчет tgδ