

2. Судовой движитель
2.1. Общие положения
Прямолинейное равномерное движение судна происходит под действием движущей силы Т, уравновешивающей силу сопротивленияRx, следовательно, силаTдолжна быть равна силеRxпо величине и направлена в противоположную ей сторону.
Для создания и поддержания движущей
силы Tна судне устанавливают
специальное устройство, которое носит
название движителя. Как правило, движитель
является механическим. Поэтому на судне
располагают также источники механической
энергии, которую движитель преобразует
в энергию поступательного движения
судна. Часть ее при разгоне судна
запасается в виде кинетической энергии,
а другая часть расходуется на работу
по преодолению силы сопротивления. Как
было отмечено ранее, при установившемся
движении судна эта работа характеризуется
буксировочной мощностью, буксировочная
мощностьPδобеспечивается движителем. Она меньше
мощностиPT, подводимой к
движителю. Отношение
![]() называют
пропульсивным коэффициентом или КПД
комплекса движитель - корпус судна.
называют
пропульсивным коэффициентом или КПД
комплекса движитель - корпус судна.
Движитель расположен вне судна в
непосредственной близости от его
корпуса. Форма корпуса, влияя на картину
обтекания движителя потоком воды, может
ухудшать, а иногда и улучшать условия
работы движителя, снижая или повышая
его эффективность, что учитывается
коэффициентом влияния корпуса ηк.
Потери мощности в самом движителе
учитываются его КПД –ηв.
Таким образом,
![]() ,
где
,
где![]() ,аηкможет быть как меньше, так
и больше единицы.
,аηкможет быть как меньше, так
и больше единицы.
Мощность PT, подведенная к движителю, всегда меньше мощности на валу главного двигателяPе, на величину потерь в линии валопровода (в сальниковых уплотнениях дейдвута, в опорных и упорном подшипниках), что учитывается через КПД валоаровода –ηвп, а также в передаче (зубчатой, электрической и др.), если она имеется, через КПД передачи -ηпер.
Следовательно, PT=Peηвпηпер, или
![]()
Движители судов во принципу действия являются реактивными. Их движущая сила создается за счет отбрасывания с ускорением в сторону, противоположную направлению движения судна, масс жидкости или газа, захватываемых движителем из окружающей среды. Отбрасывание жидкости или газа осуществляется специально сконструированннми рабочими элементами, воспринимающими силу реакции отброшенных масс. Составляющая реактивной силы, совпадающая с направлением движения судна, называется силой упора или упором движителя.
Силы, возникающие на лопастях движителя обусловливаются сопротивлением лопастей движению их в жидкости (газе) и их подъемной силой. У большинства движителей основная часть силы упора создается за счет подъемной силы на лопастных элементах.
2.2. Идеальный движитель
Допустим, что массы жидкости, захватываемые движителем, отбрасываются в виде струи, в которой на достаточном удалении от движителя наблюдаются лишь скорости, противоположные направлению движения судна и равномерно распределенные по сечению струи. Если пренебречь потерями, обусловленными вязкостью, можно получить гидродинамическую схему, позволяющую вывести простые зависимости, характеризующие работу движителя. Такую схему называют схемой идеального движителя (рис.2.1). Теория идеального движителя основана на следующих допущениях: 1) жидкость идеальна, несжимаема, безгранична, течение в системе координат, связанной с движителем, стационарное; 2) размеры движителя в осевом направлении равны нулю, а сечение потока в движителе, называемое рабочим, или гидравлическим, принимается равным габариту рабочих деталей движителя в направлении, поперечном к направлению движения; 3) струя движителя далеко за ним имеет цилиндрическую форму, а давление там такое же, как и далеко перед ним [2,9].
Введем следующие обозначения (рис.2.1);
р0,Vs- давление и скорость потока на достаточном удалении перед движителем;

Vρ- скорость протекания жидкости через рабочее сечение;
Va- вызванная скорость на достаточном удалении за движителем;
ρ1,ρ2- давление непосредственно перед движителем и за ним;
Sp- гидравлическое сечение движителя;
I и IV - cечения потока на достаточном удалении перед и за движителем соответственно;
II и III - сечения потока, совпадающие с передней и задней пo отношению к направлению движения судна, поверхностями лопастного движителя.
Поскольку размеры движителя в аксиальном направлении приняты равными нулю, эти сечения совпадают с рабочим сечением.
Применим уравнение Бернулли сначала к участку линии тока от сечения I до сечения II
![]()
Аналогично для второго участка от сечения IIIдо сеченияIV
![]()
Уравнение Бернулли нельзя применить ко всей линии тока, поскольку в плоскости рабочего сечения подводится энергия, обусловливающая скачок давления и изменение постоянной Бернулли. Из (2.2) и (2.3) имеем соответственно


Упор, действующий на элемент dSpплощади рабочего сечения движителя, запишется в виде
![]()
а упор движителя в целом
![]()
Применим теперь для определения упора закон количества движения. Пусть dm– масса жидкости, протекающая за единицу времени через сечениеdSp. ТогдаdT=dmVa. Величинаdm=ρVpdSp, следовательно,dT=ρVpVadSpи
 (2.5)
(2.5)
Приравнивая правые части (2.4) и (2.5) имеем
Vp=Vs+Va/2
откуда следует, что аксиальная вызванная скорость в рабочем сечении идеального движителя равна половине вызванной скорости на достаточном удалении за ним.
Полезная мощность, развиваемая движителем при установившемся движении Pб=TVs, так какRx=T. Затрачиваемая идеальным движителем мощностьРТбольшеРб, поскольку часть ее расходуется на ускорение отбрасываемых масс воды. Масса жидкостиdmприобретает дополнительную скоростьVа, и, следовательно, кинетическую энергию
![]()
Всей массе жидкости, проходящей через рабочее сечение идеального движителя, сообщается кинетическая энергия
![]()
КПД идеального движителя будет
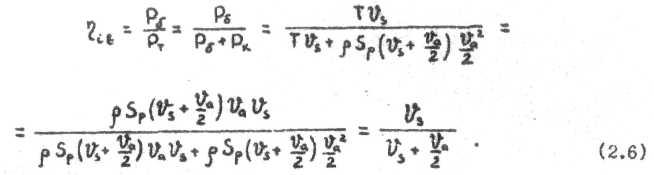
Из (2.4) и (2.6) следует, что чем выше вызванная скорость Va , тем больше сила упора и тем меньше КПД движителя.
2.3. Реальные движители
Судовые движители подразделяют на лопастные и водометные. У лопастных сила реакции воспринимается подвижными рабочими элементами, передается на упорный подшипник, а через него и на корпус судна. У водометных движителей значительная часть рекции отбрасываемых масс, а в некоторых конструкциях и вся, воспринимается неподвижными элементами и через них передается на корпус судна.
Между собой лопастные движители отличаются расположением оси вращения относительно осей судна, а также формой, расположением и числом лопастей. К лопастным движителям относятся: а) гребное колесо, б) гребной винт, в)крыльчатый движитель и г)воздушный винт. Наиболее распространенным движителем в настоящее время является гребней винт. Поэтому целесообразно остановиться на нем более подробно, выделив этот вопрос в отдельный параграф. А теперь кратко остановимся на менее распространенных.
Гребное колесо.Этот тип движителя является частично погруженным и располагается, как правило, по бортам судна. Имеет ось вращения, параллельную поперечной оси судна. Известны две конструктивные схемы гребных колес: с неподвижными (рис.2.2а) и поворотными (рис.2.26) плицами (лопастями).
На плицы работающего колеса (рис.2.2а) набегает поток, скорость которого V0, является геометрической суммой скоростиωr, обусловленной вращением колеса, и скоростиV3, поступательного движения судна. В результате обтекания плиц потоком на них развиваются гидродинамические силыR, примерно перпендикулярные поверхности плиц. Приложив к оси вращения две противоположные силыR1иR2, равные и параллельные силеR, получим пару силRиR2, момент которой преодолевается двигателем. Проекция силыR1, на направление движения даст силу упораТ.
При работе гребного колеса с неподвижными плицами возникают значительные потери энергии при входе плицы в воду и выходе ее из воды. С целью уменьшения потерь применяют колеса с поворотными плицами. Их снабжают эксцентриковым механизмом, обеспечивающим поворот плиц и уменьшение углов входа их в воду и выхода из воды. В итоге КПД колес повышается (0,5 - 0,6), однако их устройство усложняется, а масса увеличивается.
Схема колеса с поворотными плицами показана на рис.2.2б. Каждая плица шарнирно укреплена на оси А.
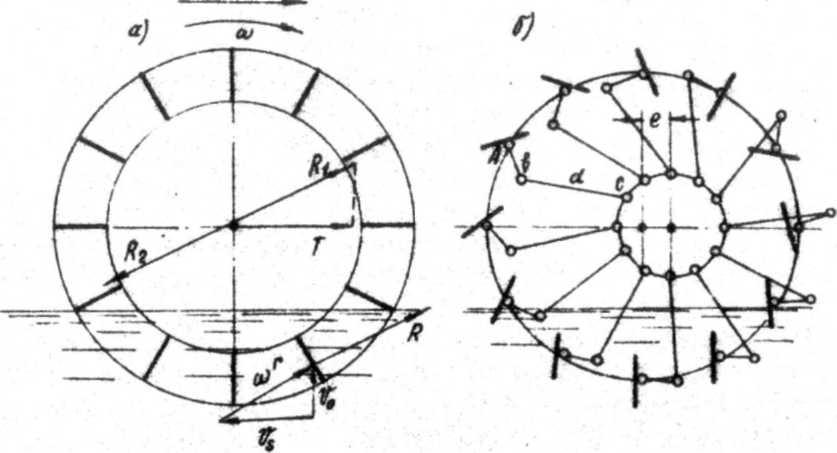
Рис. 2.2
К задней стороне плицы жестко прикреплен рычаг "b" (костыль), соединенный шарниром с тягой "d". Другой конец тяги "d" соединен с шарниром "с" эксцентрика, ось которого отстоит от оси колеса на расстоянии "e". Кинематика движения плицы ясна из рисунка.
Гребные колеса были первыми механическими движителями. В настоящее время они находят применение на мелкосидящих речных буксирах и грузопассажирских судах. Эти движители имеет большой упор, низкую частоту вращения (0,3 - 0,5 с-1) и плохие массо-габаритные показатели. Суда с такими движителями очень рыскливы при качке, в связи с чем от использования их на открытых водных пространствах отказались.
Крыльчатый движитель.Этот тал движителя с осью вращения, параллельной или почти параллельной вертикальной оси судна располагается в кормовой части днища судна. Представляет собой барабан, ось которого является осью вращения движителя. Барабан устанавливается так, чтобы его нижняя поверхность располагалась заподлицо с днищевой частью судна. По окружности барабана на равных угловых расстояниях расположены 4-7 лопастей, которые могут совершать колебательные движения вокруг своих осей. Форма лопасти в
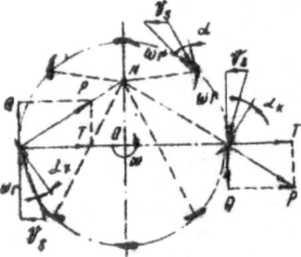
Рис. 2.3
плане напоминает форму самолетного крыла. Профиль поперечного сечения лопасти крылообразный, симметричный относительно дуги окружности барабана с закруглённой передней кромкой. Все элементы кинематической схемы, приводящей в действие лопасти движителя, размещаются внутри корпуса судна. За один оборот диска каждая лопасть совершит одно полное колебание. Кинематическая схема движителя представлена на рис.2.3. Угол поворота лопастей изменяется с помощью механизма, расположенного внутри корпуса движителя и устроенного так, что центр управления Nможет быть установлен в любой точке внутри окружности. Как видно из рисунка, лопасти поворачиваются так, что перпендикуляры и их хордам пересекаются в точкеN. Результирующая скорость потока, набегающего на лопасть, складываемся на вектора скорости,V3счет поступательного движения судна и вектораωrза счет вращения движители и образует с хордой лопасти угол атакиαк. При этом на лопасти возникает подъемная силаР. Проекция ее на направление движения дает упорТ. Проекция на касательную к окружностиQобразует момент, преодолеваемый двигателем. Сила упора является функцией длины отрезкаON, а направление - перпендикулярно ему. Перемещая центр управления в ту или иную точку окружности, можно изменить упор от нулевого до максимального значения по величине и от 0° до 360° по направлению.

Эта возможность иллюстрируется рис.2.4. Применение этого движителя не требует рулевого устройства и изменения частоты вращения двигателя. Судно, имеющее два крыльчатых движителя (рис.2.5) может двигаться лагом. Для этого упоры движителей Т1иТ2направляют так, чтобы направление их действия проходило через точку ЦБС (проекция центра бокового сопротивления на продольную ось). Результирующий упор в этом случае будет направлен перпендикулярно продольной оси судна. Такие движители целесообразно применять на судах с высокой маневренностью. Они эксплуатируются на буксирах, плавучих кранах и других судах технического флота.
В одометный
движитель.Он состоит из водопроточных
каналов, внутри которых расположен
насос того или иного типа. Насос засасывает
воду черва водозаборное отверстие и
выбрасывает ее через выходное сопло
(рис.2.6 .где 1,2- первая и вторая ступени
насоса (а,б - винт и контрпропеллер), 3 -
водометная труба, 4 - выходное сопло, 5 -
водозаборный). Реакция струи, выбрасываемой
в сторону, противоположную движению, и
является силой, движущей судно. Выброс
струи может производиться в атмосферу,
под воду или быть полуподводным. В
качестве рабочего органа применяют
осевые пропеллеры либо центробежные
насосы.
одометный
движитель.Он состоит из водопроточных
каналов, внутри которых расположен
насос того или иного типа. Насос засасывает
воду черва водозаборное отверстие и
выбрасывает ее через выходное сопло
(рис.2.6 .где 1,2- первая и вторая ступени
насоса (а,б - винт и контрпропеллер), 3 -
водометная труба, 4 - выходное сопло, 5 -
водозаборный). Реакция струи, выбрасываемой
в сторону, противоположную движению, и
является силой, движущей судно. Выброс
струи может производиться в атмосферу,
под воду или быть полуподводным. В
качестве рабочего органа применяют
осевые пропеллеры либо центробежные
насосы.
Ч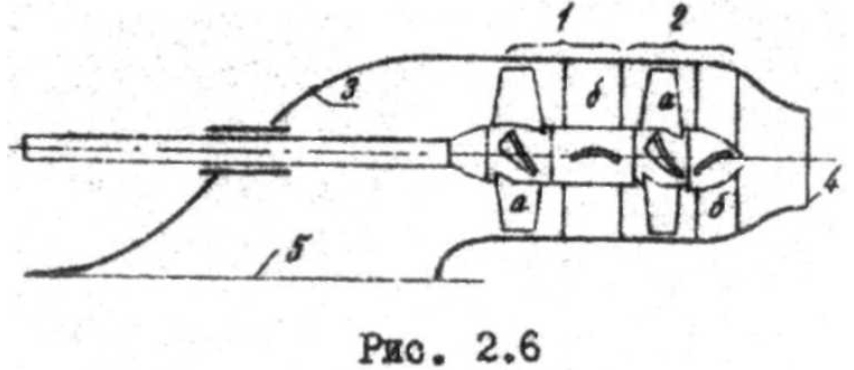 асто
водометные движители оборудуются
устройствами для поворота отбрасываемой
струи, а также специальными заслонками,
обеспечивающими ее реверс. Последние
позволяют изменять направление движения
судна (с переднего хода на задний) при
неизменном направлении вращения главного
двигателя.
асто
водометные движители оборудуются
устройствами для поворота отбрасываемой
струи, а также специальными заслонками,
обеспечивающими ее реверс. Последние
позволяют изменять направление движения
судна (с переднего хода на задний) при
неизменном направлении вращения главного
двигателя.
По КПД водометные движители на умеренных скоростях движения уступают гребным винтам. Применяются на судах, плавающих в условиях мелководья и загрязненной акватории, когда малая осадка и лучшая защищенность рабочего органа играют определяющую роль. При больших скоростях движения эффективность водометных движителей оказывается близкой к эффективности гребных винтов. Поскольку их применение обеспечивает ряд конструктивных и эксплуатационных преимуществ, в последние годы они стали применяться на судах с подводными крыльями я скеговых судах на воздушной подушке.
Р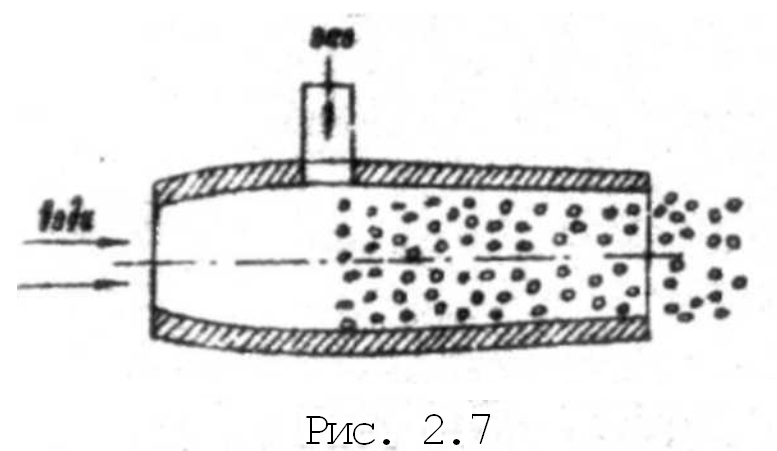
 азгон
воды в проточной части водометного
движителя можно осуществлять не только
с помощью насоса. Водометные движители,
не имеющие насосного рабочего органа,
часто называют гидрореактивными.
Такое название не является точным,
поскольку все движители по своему
принципу действия являются гидрорекактивными.
Схемы движителей без насосного
рабочего органа весьма разнообразны.
Их можно подразделить на две основные
группы: прямоточные и пульсирующие.
Прямоточный движитель (рис.2.7) состоит
из трубы переменного сечения, в которую
поступает вода и подается газ под
давлением. Образующаяся в трубе
двухфазная смесь выбрасывается в
сторону, противоположную движению
судна. Прямоточный движитель создает
тягу при движении, а начать движение с
его помощью нельзя.
азгон
воды в проточной части водометного
движителя можно осуществлять не только
с помощью насоса. Водометные движители,
не имеющие насосного рабочего органа,
часто называют гидрореактивными.
Такое название не является точным,
поскольку все движители по своему
принципу действия являются гидрорекактивными.
Схемы движителей без насосного
рабочего органа весьма разнообразны.
Их можно подразделить на две основные
группы: прямоточные и пульсирующие.
Прямоточный движитель (рис.2.7) состоит
из трубы переменного сечения, в которую
поступает вода и подается газ под
давлением. Образующаяся в трубе
двухфазная смесь выбрасывается в
сторону, противоположную движению
судна. Прямоточный движитель создает
тягу при движении, а начать движение с
его помощью нельзя.
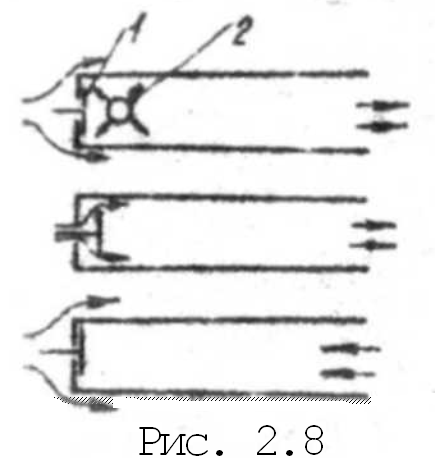
Пульсирующие движители (рис.2.8) лишены этого недостатка. Наличие клапана 1, позволяющего периодически перекрывать водоприемный канал, обеспечивает получение тяги и при отсутствии движения. Но такой движитель создает упор лишь при закрытом клапане, когда в трубу 2 подается газ. Поэтому его КПД ниже, чем у прямоточного движителя.
2.4. Гребной винт
Э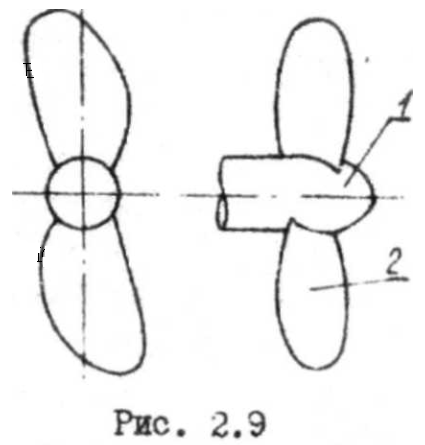 то
наиболее распространенный тип движителя.
Он применяется на судах всех типов,
отягчается простотой конструкции,
надежностью в эксплуатации, высоким
КПД (0,7 - 0,75) и относительно малой массой.
Осью вращения его является гребной вал,
параллельный оси судна или имеющий
небольшой наклон к ней. Один из его
концов, выходящий за пределы корпуса
судна, заканчивается ступицей (рис.2.9
,1 - ступица, 2 - лопасть), которая имеет
ряд лопастей (от 2-х до 8-и), установленных
радиально на одинаковом угловом
расстоянии друг от друга.
то
наиболее распространенный тип движителя.
Он применяется на судах всех типов,
отягчается простотой конструкции,
надежностью в эксплуатации, высоким
КПД (0,7 - 0,75) и относительно малой массой.
Осью вращения его является гребной вал,
параллельный оси судна или имеющий
небольшой наклон к ней. Один из его
концов, выходящий за пределы корпуса
судна, заканчивается ступицей (рис.2.9
,1 - ступица, 2 - лопасть), которая имеет
ряд лопастей (от 2-х до 8-и), установленных
радиально на одинаковом угловом
расстоянии друг от друга.
Гребные винты располагаются в кормовой оконечности судна. Лишь на некоторых тинах судов (паромы, ледоколы) могут дополнительно устанавливаться носовые винты. Обычно суда оборудуются либо одним винтом в диаметральной плоскости, либо двумя, расположенными симметрично по бортам. Реже встречаются трех- и четырехвивтовые суда.
Как правило, на каждом гребном валу устанавливают один гребной винт. Однако, в целях повышения КПД иногда применяют два соосных винта, вращающихся в противоположные стороны. В этом случае внутри полого вала размещает второй вал и один из винтов приводится во вращение наружным валом, а другой - внутренним. Подобные гребные винты называют "парными". Еще реже используют конструкцию с двумя винтами, вращающимися в одну сторону; такие винты принято называть винтами "тандем".
О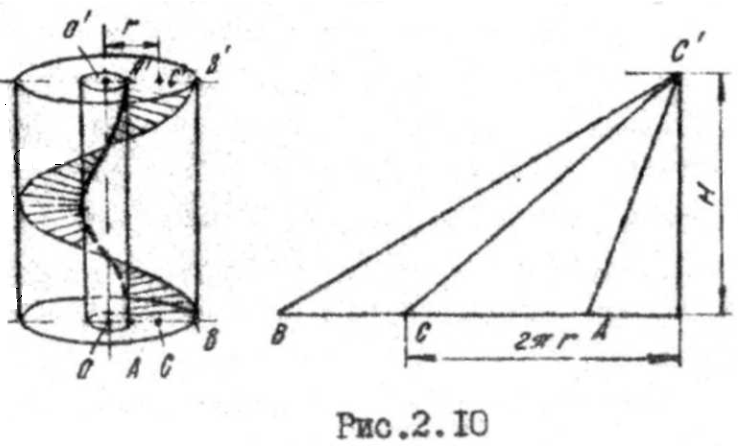 собенности
геометрии и конструкции гребного винта.Возьмем отрезок ОВ (рис. 2.10) и будем его
вращать вокруг00΄. Одновременно
будем его перемещать поступательно
вдоль оси00΄.ОтрезокАВпри этом описывает винтовую поверхность
и носит название образующей этой
поверхности. При равномерных поступательном
и вращательном движениях образующей
любой формы и произвольном угле наклона
к оси получается винтовая поверхность
постоянного шага. Если эту поверхность
пересечь несколькими соосными цилиндрами,
получим соответствующее число
винтовых линий постоянного геометрического
шага. Одну из таких линий опишет точкаСобразующейАВ, лежащая
на радиусеr.
Развернув винтовые линии постоянного
шага на плоскость, получим для каждого
сечены шаговый треугольник, катетами
которого служат шаг винтовой линии Н и
развертка основания соосного цилиндра2πr.Угол наклона винтовой линии, образующей
гипотенузу треугольника, назначают
шаговым углом, который определяется
соотношениемtgν=H/2πr.
Винтовая поверхность постоянного шага
называется правильной, если ее образующая
прямолинейна и перпендикулярна оси
вращения.
собенности
геометрии и конструкции гребного винта.Возьмем отрезок ОВ (рис. 2.10) и будем его
вращать вокруг00΄. Одновременно
будем его перемещать поступательно
вдоль оси00΄.ОтрезокАВпри этом описывает винтовую поверхность
и носит название образующей этой
поверхности. При равномерных поступательном
и вращательном движениях образующей
любой формы и произвольном угле наклона
к оси получается винтовая поверхность
постоянного шага. Если эту поверхность
пересечь несколькими соосными цилиндрами,
получим соответствующее число
винтовых линий постоянного геометрического
шага. Одну из таких линий опишет точкаСобразующейАВ, лежащая
на радиусеr.
Развернув винтовые линии постоянного
шага на плоскость, получим для каждого
сечены шаговый треугольник, катетами
которого служат шаг винтовой линии Н и
развертка основания соосного цилиндра2πr.Угол наклона винтовой линии, образующей
гипотенузу треугольника, назначают
шаговым углом, который определяется
соотношениемtgν=H/2πr.
Винтовая поверхность постоянного шага
называется правильной, если ее образующая
прямолинейна и перпендикулярна оси
вращения.
Лопасти гребного винта представляют собой тела, образованные винтовыми поверхностями. Поверхность лопасти винта, обращенную в корму судна при движении его передним ходом, называют нагнетающей поверхностью. На ней возникает повышенное давление. Поверхность лопасти, на которой создается пониженное давление, называется засасывающей, эта поверхность обращена в нос судна. При движении задним ходом засасывающая и нагнетающая поверхности меняются местами. У винтов наиболее простой геометрии нагнетающая поверхность представляет собой винтовую поверхность постоянного шага. Засасывающая поверхность всегда образуется неправильной винтовой поверхностью, шаг которой изменяется и по радиусу, и вдоль оси.
Линия пересечения нагнетающей и засасывающей поверхностей образует контур лопасти. Наиболее удаленная от оси вращения точка контура лопасти называется концом лопасти. Расстояние от конца до оси вращения представляет собой радиус винта R.Площадь круга, ометаемого лопастями винта при его вращении, рассматривают как гидравлическое сечение гребного винта.
Область примыкания лопасти к ступице называют корнем лопасти, а расстояние от корня лопасти до ее конца, измеренное по радиусу, - длиной лопасти l=R-ro (ro- радиус ступицы). Кромка лопасти, встречающая поток воды при движении судна передним ходом, называется входящей, а противоположная - выходящей. В зависимости от направления вращения образующей винты могут быть левого и правого вращения.
Контур спрямленной поверхности лопасти
может иметь различный характер (рис.2.11).
Если рассечь лопасть соосным с винтом
цилиндром и полученное сечение
развернуть на плоскость, то образуется
профиль сечения лопасти на данном
радиусе. На рис. 2.11 представлены
типичные формы контуров спрямленных
поверхностей лопастей и их профили: I -
симметричный (эллиптический), 2 -
несимметричный (саблевидный), 3 -
ледокольный, 4 - усеченный, а) - симметричный
авиационный, б) - несимметричный
авиационный, в) – двояковыпуклый
сегментный, г) - выпукло-вогнутый, д) -
сегментный, е) - ледокольный, ж) -
клиновой. В зависимости от типа гребного
винта и его назначения профили могут
быть различной формы. Их можно подразделить
на три группы профилей - сегментные,
а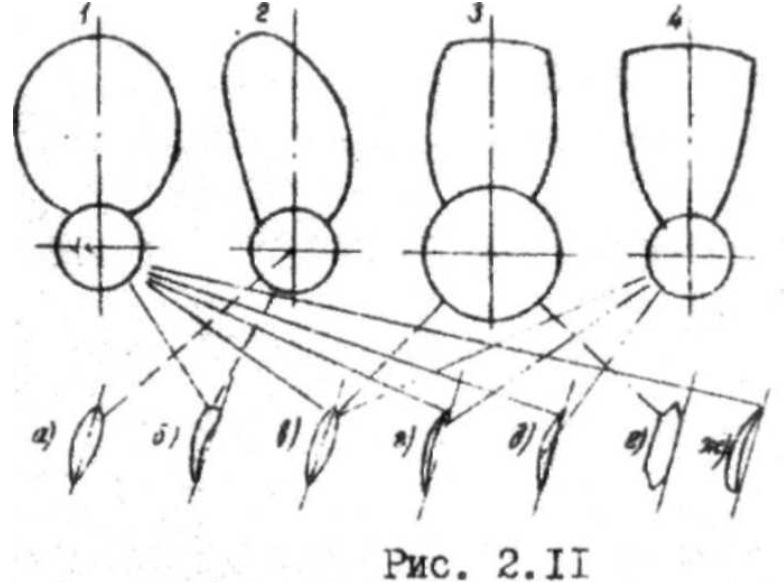 виационные
и клиновые.
виационные
и клиновые.
Для посадки винта на гребной вал в ступице имеется конусное отверстие с пазами для одной или нескольких шпонок.
Для изготовления гребных винтов широко используются бронзы и латуни, отличающиеся высокими механическими характеристиками и коррозийной стойкостью. На быстроходных судах иногда устанавливают гребные винты из титана. Нержавеющие стали используют для изготовления гребных вистов судов ледового плавания, чугун и углеродистые стали - для гребных винтов малых тихоходных судов. Некоторое распространение получили гребные винты из пластических материалов - полиамидов и стеклопластиков на эпоксидно-фенольной основе.
Некоторые гребные винты представляют собой монолитную конструкцию, другие выполняются со съемными лопастями. Металлические гребные винты изготовляют путем литья с последующей механической обработкой. Поэтому монолитные винты, кстати наиболее распространенные, называют цельнолитыми. Винты со съемными лопастями устанавливают в основном на судах ледового плавания, где существует повышенная вероятность поломки лопастей. Съемные лопасти имеют в корневом сечения фланец и крепятся с помощью болтов или шпилек. Из-за наличия фланцев диаметр ступицы винта относительно больше, чем у цельнолитого, а форма ступицы гидродинамически менее благоприятна. Поэтому КПД таких винтов на 2-5 % ниже, чем у цельнолитых. Цельнолитые винты и винты со съемными лопастями часто называют винтами фиксированного шага (ВФШ).
Упор гребного винта на переднем ходу судна воспринимается конусом гребного вала, а на заднем - гайкой, навинчиваемой на нарезном конце вала.
Образование силы упора гребного винта. Если принять, что гребной винт вращается в твердой среде, как болт в гайке, то за один оборот он переместится в осевом направлении на расстояние, равное геометрическому шагуН. Но гребной винт работает в жидкости, поэтому за один оборот, он переместится в осевом направлении на расстояниеh3< Н. Величинуh3называют абсолютной поступью гребного винта. Если осевая скорость винта в жидкостиV3, то абсолютная поступь определяется соотношениемh3 = V3 /n, гдеn- частота вращения винта.
Отношение абсолютной поступи h3к диаметру винтаDназывают относительной поступью
![]()
и рассматривают как основную безразмерную кинетическую характеристику, определяющую режим работы винта в жидкости.
Гребной винт, вращаясь вокруг своей оси и перемещаясь поступательно, воздействует на жидкость, проходящую через его рабочее сечение. Прямолинейный поток, протекая через диск винта, ускоряется в осевом направлении (рис.2.12). Это приводит к сжатию струи, протекающей через винт. В диске винта поток получает приращение момента количества движения относительно оси винта и струя жидкости закручивается в сторону его вращения.
Т аким
образом, помимо образования осевых
вызванных скоростей, возникают также
тангенциальные скорости, направленные
в сторону вращения винта и являющиеся
источником дополнительных потерь.
аким
образом, помимо образования осевых
вызванных скоростей, возникают также
тангенциальные скорости, направленные
в сторону вращения винта и являющиеся
источником дополнительных потерь.
Рассмотрим многоугольник скоростей элемента лопасти гребного винта (рис.2.13), расположенного на радиусе r. Обозначим вызванную осевую скорость в диске винтаVa1, окружную -Vt1, а их результирующую – V1, Будем полагать элемент неподвижным, а жидкость - набегающей на него с осевой скоростьюV3вследствие движения судна и окружнойVn=2πrnвследствие вращения винта.
Г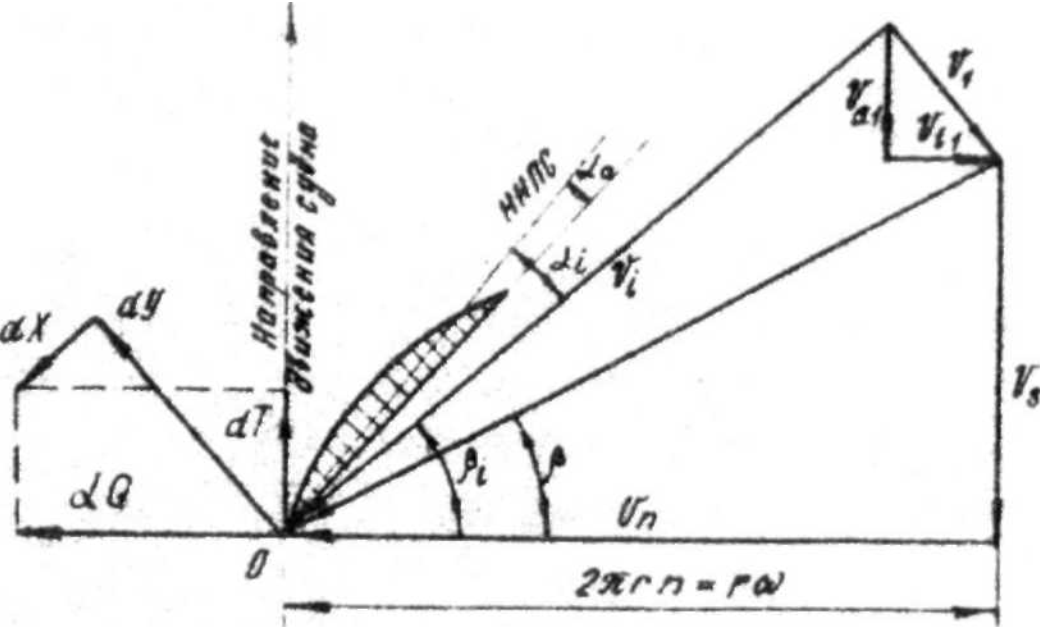 еометрическая
суммаV3,
Vn,
Va1,Vt1является результирующей скоростьюViпотока, набегающего на рассматриваемый
элемент лопасти. Эта скорость образует
с элементом некоторый угол атаки. Примем,
что силы, действующие на рассматриваемый
элемент и элемент крыла бесконечного
размаха с профилем той же формы, равны
при одинаковых углах атаки. Известно,
что на крыло, обтекаемое потоком под
некоторым углом атаки, действует
подъемная силаУ, перпендикулярная
скорости набегающего потокаVi,
и сила профильного сопротивленияX,
противоположная по направлению этой
скорости.
еометрическая
суммаV3,
Vn,
Va1,Vt1является результирующей скоростьюViпотока, набегающего на рассматриваемый
элемент лопасти. Эта скорость образует
с элементом некоторый угол атаки. Примем,
что силы, действующие на рассматриваемый
элемент и элемент крыла бесконечного
размаха с профилем той же формы, равны
при одинаковых углах атаки. Известно,
что на крыло, обтекаемое потоком под
некоторым углом атаки, действует
подъемная силаУ, перпендикулярная
скорости набегающего потокаVi,
и сила профильного сопротивленияX,
противоположная по направлению этой
скорости.
Гидродинамические характеристики профиля крыла определяются безразмерными коэффициентами подъемной силы Су и силы сопротивленияСх
![]()
и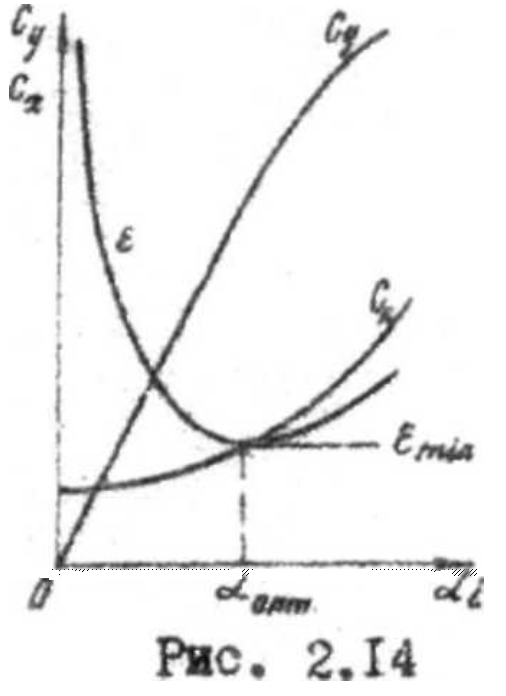 коэффициентом обратного качестваε,
который обычно называют "обратным
качеством":ε = X/У = Сх
/ Су, гдеS-
площадь крыла,р- плотность
среды.
коэффициентом обратного качестваε,
который обычно называют "обратным
качеством":ε = X/У = Сх
/ Су, гдеS-
площадь крыла,р- плотность
среды.
Коэффициенты Су и Схдля данного профиля являются функциями угла атаки. Угол атаки, при котором коэффициентСуобращается в нуль, называют углом нулевой подъемной силы, а направление потока, соответствующее этому углу, называют направлением нулевой подъемной силы (HНПC). Угол атаки удобнее отсчитывать от ННПС. Его называют гидродинамическим углом атакиαi, а образован он вектором скорости набегающего потока и ННПС. Характерные зависимостиСу.
Схиεот гидродинамического угла атакиαiпоказаны на рис. 2.14. Коэффициентε, характеризующий эффективность профиля, зависит от его формы, угла атаки и степени шероховатости поверхности. Существует такое значениеαi=αопт, при которомε= εmin принимает минимальное значение. Этот угол называют наивыгоднейшим или оптимальным углом атаки. Из рис.2.13 следует, что
![]()
а![]()
Угол βi, в свою очередь, является проекцией углаβ, характериюущего соотношение между осевой и окружной составляющими скорости потока без учета вызванных скоростей.
![]()
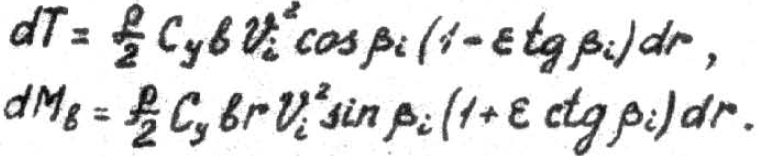
Если скорость Vi образует с ННПС элемента уголαi, на нем, как на крыле, возникает подъемная силаСу и профильное сопротивлениеСх. Проектируя эти силы на направление оси винта, получим упор, создаваемый элементом лопасти.
![]()
Проектируя силы dYиdXна направление окружной силы, получим касательную силыdQ, момент которойdMотносительно оси винта преодолевается двигателем и составляет
![]()
Из (2.8) и (2.9) следует, что упор элемента лопасти создается за счет его подъемной силы, а профильное сопротивление уменьшает упор и увеличивает касательную силу, а, следовательно, потребный момент на валу гребного винта.
Полагая площадь элемента крыла dS = bdr, гдеb- ширина крыла, создаваемый им упор и момент можно выразить через безразмерные коэффициенты:
Чтобы определить упор Tи моментMвсопротивления вращению на валу гребного винта, необходимо проинтегрировать (2.10) и (2.11) в пределах длины лопастиl=R-ro и умножить их на число лопастей винтаz:

Если в (2.12) вынесем за знак интеграла
![]() ,
а в (2.13) множитель
,
а в (2.13) множитель![]() ,
выражения упора и момента примут вид:
,
выражения упора и момента примут вид:

Интегралы в (2.14) и в (2.15) не имеют размерности. Это позволяет считать их коэффициентами k1иk2соответственно. Величинуk1называют коэффициентом упора винта, аk2- коэффициентом момента винта. Тогда

Мощность, необходимую для вращения винта, можно подсчитать по формуле
![]()
КПД винта в соответствии с 2.16, 2.18 и 2.7
![]()
Безразмерные гидродинамические характеристики k1,k2 иηв, представленные в функции относительной поступиλS, называются кривыми действия винта (рис.2.15). С их помощью можно определить упор, момент и КПД изолированного винта при различных режимах его работы.
Геометрически подобные винты при одинаковых отношениях Viиn будут иметь одинаковые значенияk1иk2как интегралов в (2.14) и (2.15). Поэтому кривые действия определяются по результатам бассейновых испытаний моделей гребных винтов.
В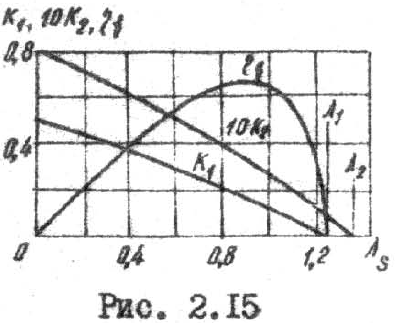 инты
регулируемого шага.Гребные винты
регулируемого шага (ВРШ) имеют съемные
лопасти, которые с помощью специального
механизма можно поворачивать при
вращающемся винте. Характеристики ВРШ
при установке его лопастей на номинальный
шаг, соответствующий расчетному режиму
работы, практически совпадают с
аналогичными характеристиками
обычного гребного винта. Небольшие
различия наблюдаются лишь в коэффициенте
полезного действия, который вследствие
относительно больших размеров ступицы
у ВРШ ниже на 1-2 %.
инты
регулируемого шага.Гребные винты
регулируемого шага (ВРШ) имеют съемные
лопасти, которые с помощью специального
механизма можно поворачивать при
вращающемся винте. Характеристики ВРШ
при установке его лопастей на номинальный
шаг, соответствующий расчетному режиму
работы, практически совпадают с
аналогичными характеристиками
обычного гребного винта. Небольшие
различия наблюдаются лишь в коэффициенте
полезного действия, который вследствие
относительно больших размеров ступицы
у ВРШ ниже на 1-2 %.
Для перекладки (поворота) лопастей ВРШ используются гидравлические, электромеханические, механические и ручные приводы. Наиболее распространенными являются гидравлические приводы.
Поворот лопастей производят перемещением штанги, расположенной э полом гребном валу. Для ВРШ гидравлического типа наиболее характерно расположение силового органа в линии валопровода внутри судна. В некоторых ВРШ гидравлический силовой орган расположен в ступице, а внутри гребного вала проходит штанга золотника и подается масло под давлением.
По характеру работы ВРШ являются всережимными и обеспечивают получение всех ходов от полных вперед до полных назад.
Основными узлами ВРШ с гидравлическим приводом является винт с поворотными лопастями (ВПЛ), полый гребной вал, механизм изменения шага (МИШ), который используется, если силовой орган находится в линии валопровода внутри судна. Если цилиндр с поршнем расположены в ступице, то в линии валопровода монтируется масловвод. Систему ВРШ обслуживает гидравлическая установка с масляными насосами и специальная система управления, связанная с постом управления в рулевой рубке.
Применение ВРШ позволяет производить пуск гребного двигателя при минимальном моменте сопротивления, так как лопасти для пуска устанавливаются в положение "СТОП", соответствующее нулевому упору. Судно с ВРШ может двигаться с какой угодно малой скоростью, при неизменной частоте вращения главного двигателя. При наличии ВРШ реверс главного двигателя производится как аварийная мера при отказе гидравлической системы управления перекладкой лопастей. Применение ВРШ на буксире позволяет производить натяжение буксирного троса чрезвычайно плавно, что исключает обрыв троса.
К недостаткам ВРШ следует отвести сложность конструкции, высокую стоимость, которая выше стоимости такого же ВФШ в 3-4 раза, сложность обслуживания и ремонта и повышенный момент трогания с места.
Работа гребного винта с направляющей насадкой. Направляющая насадка представляет собой кольцевое крыло, соосное с гребным винтом и охватывающее с небольшим зазором концы лопастей гребного винта. Профиль крыла обращен выпуклой поверхностью внутрь насадки, закругленная кромка профиля направлена в сторону движения судна. Площадь входного отверстия насадки больше площади выходного отверстия. В наиболее узком сечении насадки - в ее средней части располагается гребной винт. Если насадка жестко закреплена на корпусе судна, она называется неподвижной. Когда насадка используется как орган управления, она может поворачиваться с помощью баллера, расположенного на 0,35-0,4 длины насадки от входящей кромки ее профиля. Такие насадки называют поворотными.
Между работающим гребным винтом и насадкой развивается взаимодействие, в результате которого на насадке создается дополнительная сила упора. Благодаря поджатию потока, подтекающему к гребному винту, обтекание профиля направляющей насадки, происходит под некоторым углом атаки αи профиль работает как элемент крыла (рис.2.16). Вследствие этого на элементе насадки возникает подъемной сила и сила профильного сопротивления. При соответствующем углеαпроекция подъемной силы на направление движения оказывается больше проекции профильного сопротивления и дает составлявшую элементной силы упораΔТН. Сумма элементных упоров определяет упор насадкиТН.
Т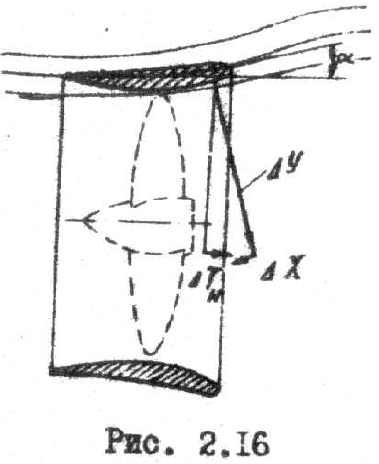 аким
образом упорТК,
комплекса винт-насадка можно представить
как суммуТК=Т+ТН,
гдеТ- упор винта.
аким
образом упорТК,
комплекса винт-насадка можно представить
как суммуТК=Т+ТН,
гдеТ- упор винта.
На ходовых режимах буксирных судов насадка позволяет повысить КПД комплекса на 20-30 %. Упор же при неподвижном судне (на швартовном режиме) увеличивается на 40-50 %.
2.5. Механические характеристики гребного винта
Режим работы винта подбирается так, чтобы винт в основном работал при максимальном значении ηв(рис.2.15), или близком к нему. В условиях спокойного состояния морской поверхности судно будет двигаться под действием силы упора с такой установившейся скоростью, при которой сила упора будет уравновешена только силой сопротивления движению самого судна. Зависимость между моментом на винтеМВи частотой его вращенияηвпри таких условиях носит название характеристики винта в "свободной воде" (рис,2.17). В соответствии с (2.17) она имеет вид квадратичной параболы. Каждой точке этой характеристики соответствует определенная установившаяся скорость движения судна. Чем дальше от начала координат находится точка, тем выше скорость судна.
Если судно неподвижно при работающем винте, значение k2в (2.Г7) выше, чем в предыдущем случав (λS= 0; рис.2.15). При тех же значениях частоты вращения винта значенияМВ будут больше. Механическая характеристика, соответствующая неподвижному судну, называется «швартовной»Мшв = аш nв2. Любой точке соответствует скорость судна
V3 = 0.
М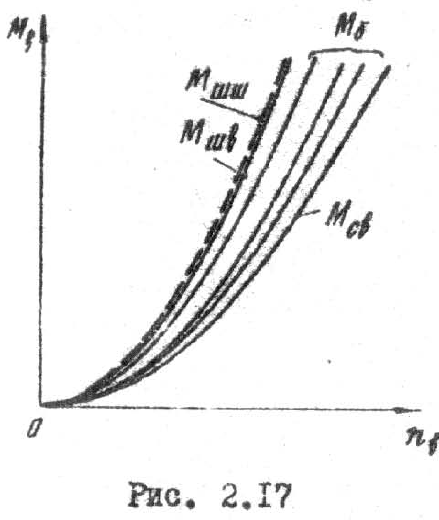 ежду
швартовной характеристикой и
характеристикой в свободной воде
располагаются так называемые
буксировочные характеристикиМδi=аδi
nв2.
Оки наблюдаются в том случае, если
сопротивление судна по тем или иным
причинам возрастает. Так же как и для
характеристики в свободной воде, на
буксировочных характеристиках каждой
точке соответствует свое определенное
значение скорости. В период ледостава
в воде находится много частиц снега,
отдельных кристаллов льда или мелких
частиц его. Такое состояние воды имеет
несколько, как правило, местных названий:
"ледяная каша", "шуга", "сало"
и др. Работа винта в таких условиях вше
напряженнее. Швартовная характеристика
в "шуге"Мшш =
ашш nв2проходит несколько вышеМшв,
так как плотность среды в этом случае
возрастает.
ежду
швартовной характеристикой и
характеристикой в свободной воде
располагаются так называемые
буксировочные характеристикиМδi=аδi
nв2.
Оки наблюдаются в том случае, если
сопротивление судна по тем или иным
причинам возрастает. Так же как и для
характеристики в свободной воде, на
буксировочных характеристиках каждой
точке соответствует свое определенное
значение скорости. В период ледостава
в воде находится много частиц снега,
отдельных кристаллов льда или мелких
частиц его. Такое состояние воды имеет
несколько, как правило, местных названий:
"ледяная каша", "шуга", "сало"
и др. Работа винта в таких условиях вше
напряженнее. Швартовная характеристика
в "шуге"Мшш =
ашш nв2проходит несколько вышеМшв,
так как плотность среды в этом случае
возрастает.
При заднем ходе судна характеристики аналогичны.
Рассмотренные характеристики относились к судну, движущемуся однонаправленно либо "вперед", либо "назад". При атом ходу "вперед" соответствует одно направление вращения винта, а ходу "назад" - противоположное. Швартовная характеристика может рассматриваться как частный случай движения со скоростью V3 = 0.
Рассмотрим характеристики при изменении направления вращения винта. Изменение направления вращения ВФШ производится с целью изменения направления движения судна на обратное. Такой маневр называют реверсом судна. Маневр изменения направления вращения винта называют реверсом винта. Поскольку гребной винт механически связан с главным двигателем, реверс винта производится путем реверсирования главного двигателя.
Время реверса зависит от инерционных масс, совершающих движение. Инерционность судна, движущегося поступательно, во много раз больше инерционности вращающегося винта и связанных с ним вала, присоединенных касс воды и движущихся частей главного двигателя. Они могут быть охарактеризованы их постоянными времени. Вследствие того, что постоянная времени судна на 1-2 порядка выше постоянной времени масс, связанных с вращательным движением винта, за время реверса винта скорость судна изменится незначительно, всего лишь на 2-5 %. Таким изменением скорости судна можно пренебречь, что позволит рассматривать реверс винта при неизменной поступательной скорости движения судна.
И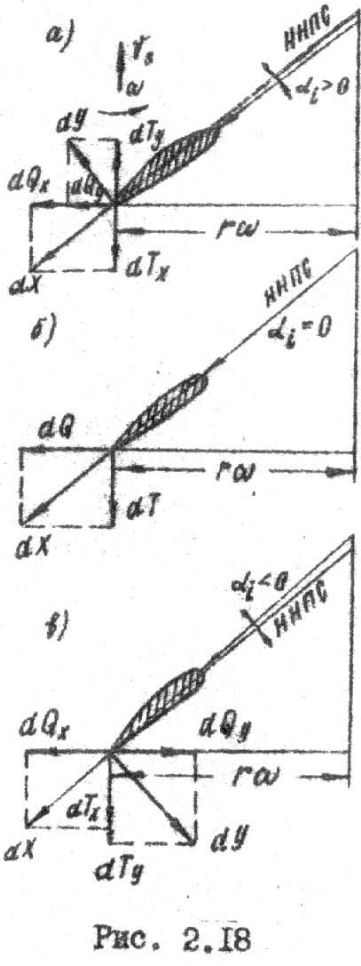 з
рис.2.13 и 2.15 можно видеть, что при работе
гребного винта на швартовахλS
= 0, аk1иk2
будут наибольшими, поскольку
углыαi
достигают при этом максимальных
значений. КПД винтаηв
= 0, посколькуλS
= 0. С увеличениемλSуглы на всех элементах лопасти
возрастают, что приводит к уменьшению
угла атакиαi,
сил, действующих на эти элементы, и
коэффициентовk1иk2 винта в целом.
При некотором значенииλS
= λ1, коэффициент упораk1, обращается в
нуль, а коэффициент моментаk2>0,
т.е.Т=0, аМв≠0.Условие, которым определяется режим
нулевого упора элемента лопасти винтаdТ=0, может быть записано в видеdYcos
βi
=dXsin βi(рис.2.18а); КПД элемента лопасти в этом
режиме будет равен нулю.
з
рис.2.13 и 2.15 можно видеть, что при работе
гребного винта на швартовахλS
= 0, аk1иk2
будут наибольшими, поскольку
углыαi
достигают при этом максимальных
значений. КПД винтаηв
= 0, посколькуλS
= 0. С увеличениемλSуглы на всех элементах лопасти
возрастают, что приводит к уменьшению
угла атакиαi,
сил, действующих на эти элементы, и
коэффициентовk1иk2 винта в целом.
При некотором значенииλS
= λ1, коэффициент упораk1, обращается в
нуль, а коэффициент моментаk2>0,
т.е.Т=0, аМв≠0.Условие, которым определяется режим
нулевого упора элемента лопасти винтаdТ=0, может быть записано в видеdYcos
βi
=dXsin βi(рис.2.18а); КПД элемента лопасти в этом
режиме будет равен нулю.
При некотором значении λS = λ0, причемλ1 < λS < λ2 угол атаки элементаαi= 0 и подъемная сила на нем не создаетсяdY= 0(рис.2.18б). Гребной винт в этом случае работает в режиме нулевой подъемной силы.
При дальнейшем росте λSдо значенияλS= λ коэффициентk2=0, аk1<0. Угол атакиαi<0 и подъемная сила на элементе лопасти также меняет свой знак (рис.2.18в). Гребной винт при этом работает в режиме нулевого момента. Он определяется условиемdМв = 0, илиdYcos βi =dXsin βiприdY<0.
Анализируя кривые действия винта, можно заметить, что в диапазоне 0< λS < λ1гребной винт развивает положительный упор и работает как движитель. При λS >λ1винт работает в режиме гидротурбины, создавая вращающий момент. В диапазоне поступейλ1 < λS < λ2, гребной винт не может быть использован ни как движитель (Т<0), ни как турбина (М>0).
Зависимость момента сопротивления винта от частоты его вращения при реверсе называют реверсивной характеристикой. На рис.2.19 показан типичный вид реверсивных характеристик ( ---- при направлении вращения винта, соответствующем ходу "вперед" и реверсу с хода "вперед" на ход "назад"; - - - - - обратного направления). Точками 1-5 показано значение частоты вращения, с которой начинается реверс. Каждой из точек соответствует свое значение скорости движения судна, причем VS1 >VS2 >VS3 >VS4 >VS5. Для каждой из реверсивных характеристикMР1–MР5 считаем, что скорость суднаVS1 –VS5остается неизменной.
Чтобы среверсировать винт, уменьшают его частоту вращения. При этом довольно быстро падает момент сопротивления (см., например, характеристику MР1,при которой реверс начинаем с точки I иVS1). Если принять координаты точки за единицу, то уже приnв=0.6 – 0.75Мв=0 (точка А). При дальнейшем уменьшенииnвмомент становится
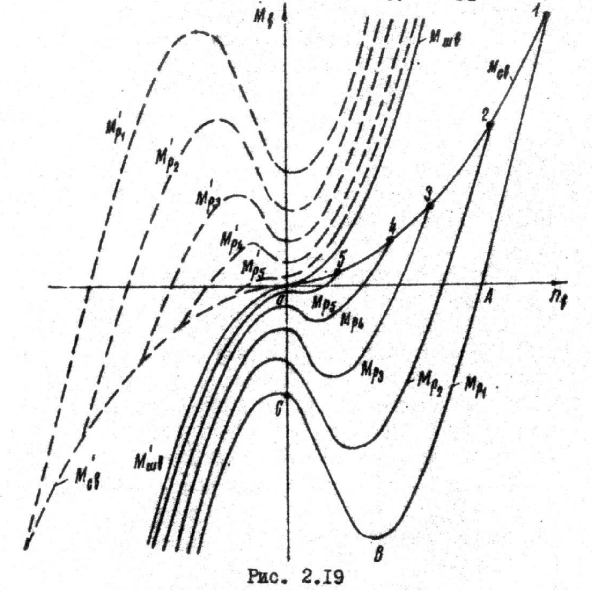
отрицательным, т.е. сам винт переходит в режим гидротурбины. Если продолжать снижать частоту вращения максимальное значение момента в режиме гидротурбины наступит в точке В, приnв=0.35.Мвможет достигать при этом 1,0 и даже выше. Если винт затормозить (nв=0; точка С) значение момента при этом будет по-прежнему отрицательным и равным 0,2-0,4. При вращении винта в обратную сторону отрицательный номинальный момент достигается уже пои частоте вращенияnв = - (0,3 – 0,35). По мере накопления опытного материала относительно поведения гребных винтов в режиме их реверсирования выяснилось, что обобщенной реверсивной характеристики не существует. Особенно это относится к участку, характеризующему режим работы гидротурбиной.
2.6. Взаимодействие гребного винта со льдом
Удары лопастей о лед и заклинивание винта являются наиболее тяжелыми режимами работы гребной установки. Чаще всего именно они вызывают повреждения винтов и валов.
При работе ледоколов в полях ровного льда каждая лопасть в соприкосновение со льдом, разрушает его и далее поворачивается в свободной воде. Соответственно этому меняется и момент сопротивления. Он значительно увеличивается во время разрушения льда лопастью.
Если момент сопротивления больше некоторого предельного значения, то установке не будет в состоянии преодолевать дополнительную ледовую нагрузку. Гребной винт окажется заклиненным попавшей под его лопасти льдиной.
Наблюдения при плавании ледоколов в ледяных полях показали, что лопасти гребного винта фрезеруют попавшие под них льдины. Когда под лопасть попадает льдина, которую винт не в состоянии разрушить, она "буксируется" судном. Если она упрется в ледовое поле, силы, воспринимаемые лопастью, могут оказаться настолько большими, что повредят винт (чаще всего его лопасть) или даже вал.
В соответствии со свойствами льда (текучесть и хрупкость) он разрушается или вследствие смятия, или за счет скалывания с одновременным смятием. Не рассматривая вопроса, как определить необходимые для разрушения льда моменты на винте, обратимся к рис.2.20.
П омимо
характеристик винта в свободной воде
и швартовной, на нем представлен характер
граничных значений моментов на винте,
необходимых для разрушения льда |4].
омимо
характеристик винта в свободной воде
и швартовной, на нем представлен характер
граничных значений моментов на винте,
необходимых для разрушения льда |4].
Теоретическая зависимость значений момента разрушения льда смятием показана кривой Мсм. Аналогичная зависимость за счет смятия и скалывания изображена какМсм+скПроверка этих зависимостей на опыте показала, что существует некоторое значение моментаМmin, ниже которого разрушение льда не происходит. Результирующее значение момента, которое должно быть обеспечено для разрушения льда, показfно кривойMвл, В диапазоне частот вращения винта0 ≤ n < n1она получается как суммаМшв и левой ветвиМсм. На участкеn1 ≤ n < n2- как суммаМшвиМmin. На участкеn2 ≤ n < n3- за счет сложенияМшвс правой ветвьюМсм, а приn ≤ n3, как суммаМшв+ Мсм+ск.
Вращающиеся части системы двигатель-валопровод-движителъ можно рассматривать, как некоторые материальные массы (двигателя и движителя), соединенные между собой механической связью (валопроводом). Валопровод же обладает упругими свойствами. Эта система, как и любая другая механическая система, имеет собственную резонансную частоту колебаний. Резонансные колебания возникают при определенной частоте вращения гребного вала. При резонансных явлениях возникают повышенные напряжения в материале механической системы. Если в диапазоне рабочих частот вращения действующие механические напряжения превышают допускаемые для длительной работы. Регистр СССР требует назначить запретную зону частот вращения. Она должна быть не меньше определенной по формуле
![]()
где np - расчетная частота вращения,nзап - запретные частоты вращения,nрез - резонансная частота вращения,τрез- механическое напряжение приnрезτдопдопустимое механическое напряжение [7].
Резонансные колебания, возникавшие при вращательном движении, носят название крутильных колебаний. Причиной их возникновения является неравномерность действующего в системе какого-либо механического момента. Источником такой неравномерности, например, является двигатель внутреннего сгорания.
На судах ледового плавания источником неравномерности момента является гребной винт, взаимодействующий со льдом. Возникающие при крутильных колебаниях напряжения создают опасность внезапного разрушения элементов системы.
Бороться с такими явлениями можно либо пассивным, либо активным способом. К пассивному способу борьбы относится изменение параметров колеблющегося элемента, что позволяет сместить резонансную частоту и вывести ее за пределы рабочего диапазона. В рассматриваемом случае такой способ неприемлем, поскольку для смещения резонансной частоты за верхний предел рабочего диапазона, необходимо увеличивать диаметр вала, который уже у современных ледоколов достигает примерно метра.
Активный способ борьбы предполагает установку колебательной системы, создающей колебания той же частоты, но в противофазе. Таким способом можно уменьшить (сдемпфировать) переменную составляющую механических напряжений.
Очевидно, что энергетическая характеристика такой системы должна соответствовать энергетической характеристике источника крутильных колебаний. Поэтому такое решение либо малоприемлемо, либо совсем неприемлемо. Учитывая, что почти на всех ледоколах и судах активного ледового плавания подвод мощности от первичных двигателей к гребным винтам осуществляется с помощью электропередачи, целесообразно использовать ее демпфирующие свойства. Это возможно, поскольку при колебательном процессе между механической и электрической частями электропривода возникает обмен энергией, часть которой при этом теряется.