

4336
.pdfФедеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования
«Воронежская государственная лесотехническая академия»
Т Е О Р Е Т И Ч Е С К А Я М Е Х А Н И К А
Раздел КИНЕМАТИКА
Методические указания и контрольные задания для студентов факультета заочного обучения
специальности 150200 (190601) – Автомобили и автомобильное хозяйство
Воронеж 2007
2
УДК 531.1
Смотрова, О. А. Теоретическая механика. Раздел Кинематика [Текст] : методические указания и контрольные задания для студентов факультета заочного обучения специальности 150200 (190601) – Автомобили и автомобильное хозяйство / О. А. Смотрова, Л. М. Кречко, О. Б. Иевлева ; Фед. агентство по образованию, ГОУ ВПО «ВГЛТА». – Воронеж, 2007. – 36 с.
Печатается по решению редакционно-издательского совета ГОУ ВПО «ВГЛТА»
Рецензент д-р техн. наук, заведующий кафедрой высшей математики и теоретической механики ВГАУ, проф. В.П. Шацкий
Научный редактор д-р техн. наук, заведующий кафедрой сопротивления материалов и теоретической механики ГОУ ВПО «ВГЛТА», профессор В.И. Харчевников
3
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТ. ВЫБОР ВАРИАНТОВ. ПОЯСНЕНИЯ К ТЕКСТУ ЗАДАЧ
Контрольная работа №2 состоит из четырех заданий. Задание К-1 относится к теме "Кинематика точки", задание К-2 – к теме "Передача простейших движений", К-3 – «Сложное движение точки», К-4 – «Плоское движение тела».
Приступая к решению задач контрольной работы, необходимо изучить теоретический материал по теме задачи, затем разобрать примеры задач на эту тему в учебнике и задачу, приведенную в данном методическом пособии.
По курсу теоретической механики студенты специальности АиАх факультета заочного обучения ВГЛТА выполняют три контрольные работы (по статике, кинематике и динамике), сдают один экзамен. Прием контрольных работ на рецензирование заканчивается за 5 дней до начала экзаменационной сессии.
Каждую контрольную работу следует выполнять в отдельной тетради, на обложке которой нужно написать свою фамилию и инициалы, специальность, курс, номер зачетной книжки, номер контрольной работы и вариант, который определяется по двум последним цифрам шифра. Две последние цифры номе-
ра зачетной книжки (шифр) являются основными при выборе варианта задачи. По последней цифре вбирается номер схемы, а по предпоследней цифре выбираются исходные данные в соответствующей таблице. Например, если две последние цифры номера зачетной книжки 54, то надо в задаче взять схему 4 и исходные данные в таблице к этой задаче соответствующие номеру 5.
При оформлении контрольной работы нужно оставлять поля для замечаний рецензента. Выполняя контрольные работы, необходимо полностью переписать текст каждой задачи и сделать относящийся к задаче чертеж, на котором должны быть изображены оси координат и все векторы, встречающиеся в ходе решения задачи (силы, скорости, ускорения). Чертеж выполняется аккуратно с учетом условий решаемого варианта: на нем все углы, действующие силы, расположение тел должны соответствовать этим условиям. Единицы измерения получаемых величин нужно обязательно указывать. При оформлении решения задачи следует руководствоваться примером решения этого типа задач, приведенного в данном методическом пособии. Ход решения должен сопровождаться краткими пояснениями (какие формулы или теоремы применялись, откуда получается тот или иной результат и т.п.).
4
Задачи, не относящиеся к вашему варианту и не отвечающие перечисленным требованиям, не проверяются, а работа возвращается для переделки. К работе, высылаемой на повторную проверку (если она выполнена в другой тетради), должна обязательно прилагаться незачтенная ра-
бота. Экзамен может сдавать студент только при наличии зачтенных контрольных работ.
При чтении текста задачи следует учитывать, что большинство рисунков дано без соблюдения масштаба. Все нити (тросы, веревки, канаты) не-
растяжимые и невесомые. Нити, перекинутые через блок, по блоку не скользят. Все катки катятся по плоскости без скольжения. Все связи, если не сделано других оговорок, считаются идеальными.
КИНЕМАТИКА. ОСНОВНЫЕ ПОНЯТИЯ
Кинематикой называют раздел механики, в котором изучаются геометрические характеристики движения тел без учета действующих на них сил.
Механическим движением тела называют изменение его положения в пространстве относительно других тел с течением времени. Движение одного и того же тела относительно разных тел оказывается различным. Для описания движения тела нужно указать, по отношению к какому телу рассматривается движение. С эти телом связывают систему координат – систему отсчета, позволяющую определять положение движущегося тела в любой момент времени. В Международной системе единиц (СИ) за единицу длины принят метр, а за единицу времени – секунда. Всякое тело имеет определенные размеры. Различные части тела находятся в разных местах пространства. Однако, во многих задачах механики нет необходимости указывать положения отдельных частей тела. Если размеры тела малы по сравнению с расстояниями до других тел, то данное тело можно считать его материальной точкой. Так можно поступать, например, при изучении движения планет вокруг Солнца. Если все части тела движутся одинаково, то такое движение называется поступательным. Поступательно движутся, например, кабины в аттракционе «Гигантское колесо», автомобиль на прямолинейном участке пути и т.д. При поступательном движении тела его также можно рассматривать как материальную точку. Тело, размерами которого в данных условиях можно пренебречь, называется материальной точкой. Понятие материальной точки играет важную роль в механике. Перемещаясь с течением времени из одной точки в другую, тело (материальная точка)
5
описывает некоторую линию, которую называют траекторией движения тела. Положение материальной точки в пространстве в любой момент времени (закон движения) можно задать тремя способами: векторным, координатным и естественным.
Основными физическими величинами в кинематике материальной точки являются пройденный путь σ, перемещение s , скорость v и ускорение a .
Путь σ является скалярной величиной. Перемещение s , скорость v и ускорение a . – величины векторные. Чтобы задать векторную величину, нужно задать ее модуль и указать направление.
СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
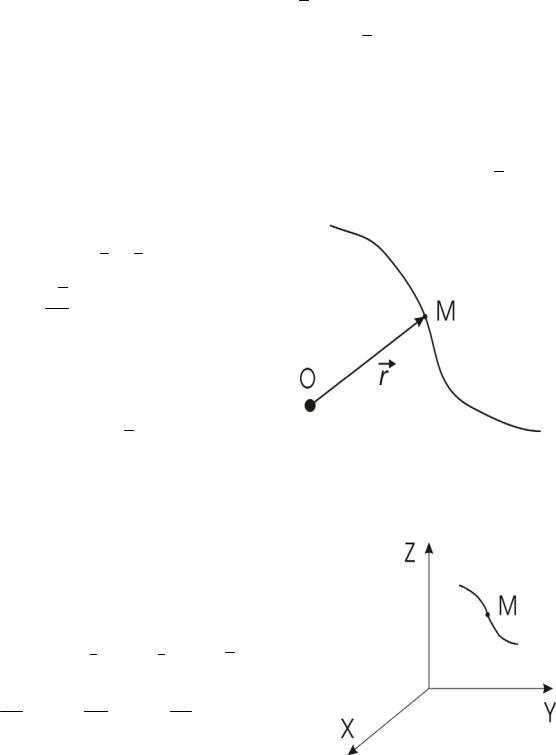
Векторный. Движение точки М описывается радиус-вектором r , который начинается в некоторой неподвижной точке О, а заканчивается в движущейся точке М.
Уравнение движения: r = r (t) .
Скорость: v = ddtr − 1-я производная от ра-
диус-вектора по времени. Вектор скорости направлен по касательной к траектории движения точки.
Ускорение: a = |
dv |
= |
d 2 |
r |
|
– 1-я производная |
dt |
dt 2 |
|
||||
|
|
|
|
|||
от вектора скорости или 2-я производная от радиус-вектора по времени. Вектор ускорения направлен в сторону вогнутости кривой, по которой движется точка.
Координатный. Движение точки М описывается ее координатами x, y, z (в заданной системе координат).
Уравнения движения: x=x(t), y=y(t), z=z(t).
Скорость: v = vX i + vY j + vZ k ,
где vX = dxdt , vY = dydt , vZ = dzdt – проекции вектора скорости на оси координат.
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
||||
Модуль скорости: v = |
v2X |
+ vY2 |
+ vZ2 . |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ускорение: a = aX i |
+ aY j + aZ k , |
|
|
|
|
|
|
|||||||||||||||
где a |
X |
= |
dvX |
= |
d 2 x |
, a |
= |
dvY |
|
|
= |
d 2 y |
, a |
Z |
= |
dvZ |
= |
d 2 z |
– проекции век- |
||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
dt |
|
dt 2 |
Y |
|
dt |
|
|
|
|
dt 2 |
|
dt |
|
dt 2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
тора ускорения на оси координат, i, j, k – единичные орты координатных осей
x, y, z. Модуль ускорения: a = a2 |
+ a2 |
+ a2 . |
X |
Y |
Z |
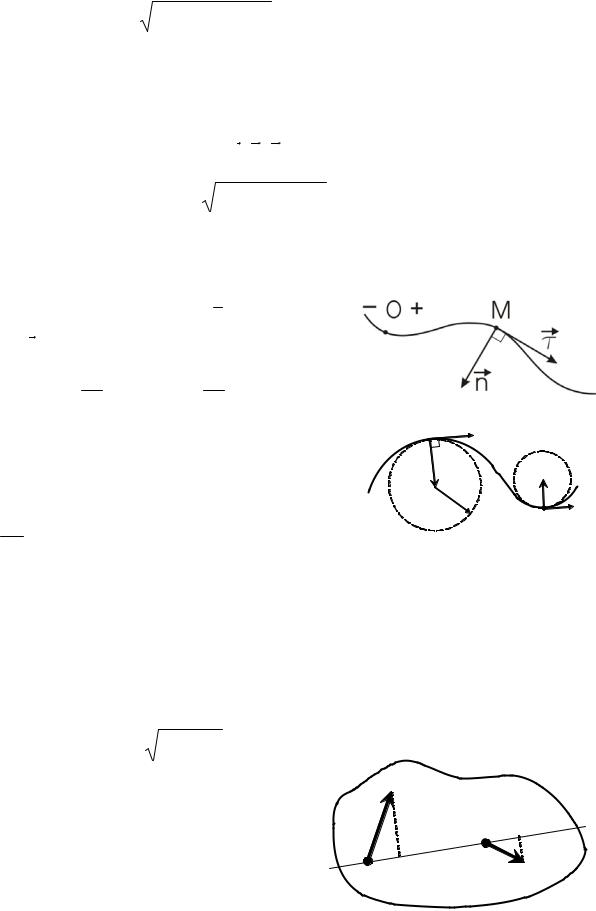
Естественный. Движение точки М описывается дуговой координатой s – длина дуги ОМ. Должны быть заданы траектория, начало отсчета, положительное направление отсчета.
Уравнение движения: s = s(t) , τ – орт каса-
тельной, n – орт главной нормали.
Скорость: v = ds |
τ, где v = ds – модуль век- |
|
|
|
dt |
dt |
|
aτ |
|
тора скорости – 1-я производная от дуговой ко- |
M |
|
||
|
|
|||
ординаты по времени. |
an |
|
|
|
Ускорение: a = aτ τ + an n , где |
|
|
||
ρ |
a |
n |
||
aτ = dv модуль касательного (тангенциального) |
|
|
aτ |
|
|
|
|
||
dt |
|
|
|
|
ускорения, а вектор aτ направлен вдоль касательной в случае ускоренного движения так же как скорость, в случае замедленного – в противоположную
сторону, an = |
v2 |
– модуль нормального ускорения, вектор an направлен |
|
ρ |
|||
|
|
вдоль нормали к центру кривизны кривой, ρ – радиус кривизны траектории.
Модуль ускорения a = a2 |
+a2 . |
|
|
τ |
n |
|
|
ОСНОВНАЯ ТЕОРЕМА КИНЕМА- |
|
vA |
|
ТИКИ: проекции скоростей двух точек |
|
В |
|
твердого тела на прямую их соединяющую |
А |
vB |
|
равны. |
|
||
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинематика |
|
|
|
|
|
|
|
|
Таблица 1 |
|||
|
|
|
|
Простейшие движения твердого тела |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Поступательное |
|
|
|
Вращательное |
|||||||||
|
|
|||||||||||||||
Поступательным называется |
Вращательным называется такое движе- |
|||||||||||||||
такое движение твердого тела, |
ние твердого тела, при котором какие-либо |
|||||||||||||||
при котором прямая, проведенная |
две точки |
тела остаются |
неподвижными |
|||||||||||||
через две произвольные точки те- |
(прямая, проведенная через эти точки, яв- |
|||||||||||||||
ла, движется параллельно своему |
ляется осью вращения). |
|
|
|
||||||||||||
первоначальному положению. |
Уравнение движения: ϕ = ϕ(t) , |
|||||||||||||||
Уравнение движения: |
где ϕ – угол поворота тела [рад]. |
|||||||||||||||
rC = |
rC (t), |
|
Угловая скорость: ω = |
dϕ |
[рад/c] |
|||||||||||
где |
rC – радиус-вектор центра |
dt |
|
|
||||||||||||
масс. |
|
(1-я производная от угла поворота по вре- |
||||||||||||||
Теорема. При |
поступательном |
мени). |
|
|
|
dω |
|
|
d 2ϕ |
|
||||||
движении все точки тела движут- |
Угловое ускорение: ε = |
|
= |
[рад/c2] |
||||||||||||
|
|
|||||||||||||||
ся по одинаковым траекториям и |
|
|
|
|
|
dt |
|
dt2 |
||||||||
(1-я производная от угловой скорости, или |
||||||||||||||||
имеют в любой момент времени |
||||||||||||||||
геометрически равные скорости и |
2-я производная от угла поворота по време- |
|||||||||||||||
ускорения. |
|
ни). |
|
|
|
|
|
|
|
|
|
|
||||
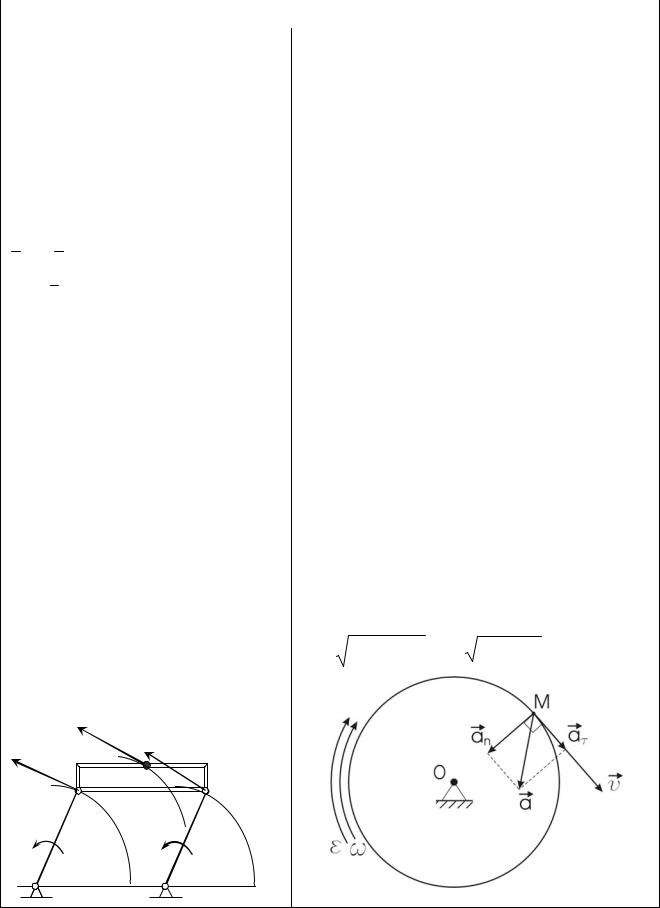
|
Скорость точки М: vM = ω R , vM OM . |
|||||||||||||||
Спарник АВС движется посту- |
||||||||||||||||
пательно (ОА = О1А), поэтому |
Ускорение точки М: aM = aτ + an |
|||||||||||||||
траектории, скорости и ускорения |
a = ε R, |
a |
|
OM , |
|
|
|
|||||||||
всех точек тела АВС одинаковы в |
τ |
|
τ |
|
|
|
|
|
|
|
|
|||||
данный момент времени: |
an = ω2 R , |
an – по ОМ к оси вращения. |
||||||||||||||
|
vA = vB = vC , |
a = aτ2 +an2 = R ε2 +ω4 |
||||||||||||||
|
aA = aB = aC |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
vC |
v |
|
|
|
|
|
|
|
|
|
|
|
|
vA |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
С |
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
А |
В |
|
|
|
|
|
|
|
|
|
|
|
||||
ОО1
|
|
|
|
8 |
|
|
|
|
|
Кинематика |
Продолжение табл. 1 |
||
|
|
Передача простейших движений |
|
|||
|
|
Вид передачи |
|
Кинематические |
||
|
|
|
соотношения |
|||
|
|
|
|
|
||
|
|
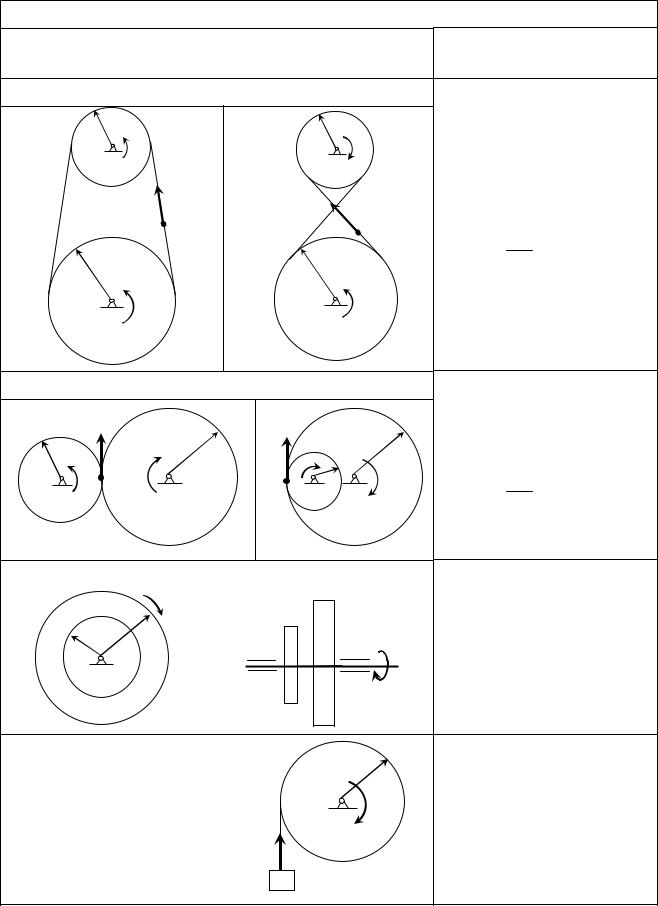
Ременная прямая и обратная: |
|
|
||
1 |
R |
|
|
R |
|
|
|
|
1 |
|
vA = ω1 R1 = ω2 R2 |
||
|
|
vA |
|
|
||
|
|
|
vA |
|
|
|
|
|
А |
|
|
|
|
|
|
|
А |
R1 = ω2 |
||
|
|
|
|
|
||
R2 |
|
|
R2 |
|
R2 |
ω1 |
2 |
|
|
2 |
|
|
|
Зубчатая с внешним и внутренним зацеплением |
|
|
||||
v |
A |
R2 |
vA |
R2 |
vA = ω1 R1 = ω2 R2 |
|
R1 |
|
|
|
|||
|
А |
А |
R1 |
R1 |
= ω2 |
|
1 |
|
|||||
|
|
|||||
|
|
|
1 |
|
R2 |
ω1 |
|
|
2 |
|
|
||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Фрикционная |
|
|
|
|
|
|
R2 |
1 |
2 |
|
|
|
|
|
ω1 = ω2 = ω |
|||
R1 |
|
|
|
|||
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Между телами, движущи- |
|
R1 |
|
|
||
|
1 |
|
|
|||
мися поступательно (груз Р) |
|
vP = ω1 R1 |
||||
|
|
|||||
и вращательно (вал 1) |
|
|
||||
vP |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|

9 |
|
Кинематика |
Продолжение табл. 1 |
Плоскопараллельное движение твердого тела
Плоским, или плоскопараллельным, называется такое движение твердого тела, при котором все точки тела перемещаются в плоскостях, параллельных некоторой неподвижной плоскости.
Плоское движение тела сводится к движению плоской фигуры в ее плоскости.
Уравнения движения плоской фигуры: xA = xA (t), yA = yA (t), ϕ = ϕ(t), где точка А – полюс.
Теорема. Скорость любой точки плоской фигуры равна геометрической сумме скорости полюса и скорости вращательного движения точки вместе с фигурой вокруг полюса. vB = vA + vB( A) ,
где vB( A) = ω AB , vB( A) AB
Терема. Ускорение любой точки плоской фигуры равно геометрической сумме ускорения полюса и ускорения вращательного
движения точки вместе с фигурой вокруг полюса.
aB = aA + aB( A) , где aB( A) = aBτ( A) + aBn( A) ,
aBτ( A) = ε AB , aBτ( A) AB
по направлению ε. aBn ( A) = ω2 AB ,
aBn( A) – по АВ от В к А
Мгновенным центром скоростей (МЦС)
плоской фигуры называется точка, жестко связанная с фигурой, скорость которой в данный момент времени равна 0.
Пусть Р – МЦС, т.е. vP = 0 , тогда скорости точек А, В и С тела определяются следующими соотношениями:
vA = ω AP , vA AP vB = ωBP , vB BP vC = ω CP , vC CP

|
|
|
10 |
|
|
|
|
|
|
|
Кинематика |
|
|
Окончание табл. 1 |
|||
|
|
Сложное движение точки |
|
|||||
Пусть |
относительно |
неподвижной |
|
Z |
|
|
|
|
системы координат XYZ движется под- |
|
|
L |
|
||||
|
|
z′ |
M |
|||||
вижная среда S, с которой связана под- |
|
|
|
|||||
|
|
|
|
y′ |
||||
вижная система координат x′y′z′. В под- |
|
|
|
S |
||||
вижной среде по траектории L движется |
|
|
|
|
|
|||
точка М. |
|
|
|
|
|
|
x′ |
|
Абсолютным движением точки |
М |
|
|
|
|
Y |
||
называется ее движение по отношению |
X |
|
|
|
||||
|
|
|
|
|||||
к неподвижной (абсолютной) системе |
|
|
|
|
|
|||
координат (XYZ). |
|
|
|
|
|
|
|
|
Траектория точки, ее скорость и ускорение называются соответственно абсо- |
||||||||
лютной траекторией, абсолютной скоростью vабс |
и абсолютным ускорением |
|||||||
aабс . Относительным движением точки М называется ее движение по отно- |
||||||||
шению к подвижной системе координат (x′y′z′). Траектория точки, ее скорость |
||||||||
и ускорение называются соответственно относительной траекторией, отно- |
||||||||
сительной скоростью vотн и относительным ускорением aотн. Переносным |
||||||||
движением, переносной скоростью vпер |
и переносным ускорением aпер точки |
|||||||
М называется движение, скорость и ускорение точки подвижной среды, совпа- |
||||||||
дающей в данный момент времени с точкой М, относительно неподвижной сис- |
||||||||
темы координат. |
|
|
|
|
|
|
|
|
Теорема. Вектор абсолютной скорости равен геометрической сумме векто- |
||||||||
ров относительной и переносной скоростей: vабс |
= vотн + vпер. |
|||||||
Теорема. Вектор абсолютного ускорения равен геометрической сумме трех |
||||||||
векторов: относительного, переносного и Кориолисова ускорений: |
||||||||
aабс = aотн + aпер + aкор . |
|
|
|
|
|
|
||
или в развернутом виде: aабс = aотнτ |
+ aотнn |
+ aперτ |
+ aперn |
+ aкор . |
||||
Вектор ускорения Кориолиса определяется формулой: aкор |
= 2 ωпер ×vотн. |
|||||||
Модуль ускорения Кориолиса aкор = 2 ωпер |
vотн sin (ωпер , vотн ). |
|||||||