Лабораторная работа 1 обработка результатов измерений с многократными наблюдениями
Цель работы: изучение методики обработки результатов прямых измерений с многократными наблюдениями; приобретение навыков измерения сопротивлений резисторов цифровым омметром.
Описание измерительной схемы цифрового омметра
Измерительной схемой омметра является четырехплечий уравновешенный мост, представляющий собой прибор сравнения, в котором измеряемое сопротивление Rxопределяется путем сравнения с известными образцовыми сопротивлениями плеч моста R2, R3, R4(рис.1.1).
В схеме моста: Rx– измеряемое
сопротивление; R2– сопротивление
плеча сравнения; R3и R4–
сопротивления плеч отношения; СУ –
сравнивающее устройство; ИП – источник
питания.
схеме моста: Rx– измеряемое
сопротивление; R2– сопротивление
плеча сравнения; R3и R4–
сопротивления плеч отношения; СУ –
сравнивающее устройство; ИП – источник
питания.
Плечи R2и R3состоят из ограниченного набора точно известных сопротивлений, которые могут переключаться в процессе уравновешивания моста; плечо отношения R4 – это пятидекадный магазин сопротивлений. СУ омметра представляет собой усилитель постоянного тока и переключающее устройство со схемой управления уравновешиванием моста.
При равновесии моста потенциалы точек а и б равны, Uаб= 0, поэтому на основании второго закона Кирхгофа можно записать:
RxI1= R3I3;
R2I1=R4I3,
откуда условие равновесия моста можно представить в виде:
![]() .
.
В цифровом омметре процесс уравновешивания моста полностью автоматизирован. Уравновешивание начинается с автоматического поиска поддиапазона измерения, при котором определяются необходимые величины сопротивлений R2и R3. После выбора поддиапазона уравновешивание продолжается за счет изменения сопротивления R4.
Изменение сопротивления R4осуществляется «сверху», т.е. в соответствии с алгоритмом уравновешивания сопротивление уменьшается от максимального значения до необходимого. При этом сопротивление отключается, если это приводит к условию:
![]() .
.
Величина сопротивлений R2и R3определяет в цифровом отсчете место десятичной запятой и единицу измерения:– омы, К – килоомы или М – мегаомы, а величина сопротивления R4– численное значение измеряемого сопротивления.
Весь цикл работы – определение поддиапазона и уравновешивание моста – осуществляется за десятки миллисекунд. Информация о результатах измерения может быть использована во внешних устройствах (например, ЭВМ), регистрация результатов измерения при необходимости осуществляется подключаемой к омметру цифропечатающей машинкой.
На передней панели корпуса омметра расположены следующие элементы: а) выключатель (тумблер) «Сеть»; б) кнопка «Пуск»; в) табло отсчетного устройства; г) ручка потенциометра «Время индикации»; д) разъем для подключения измерительного кабеля.
Погрешности измерения цифровым омметром
Источниками погрешностей измерений сопротивлений цифровым омметром могут быть:
погрешность дискретности, возникающая в связи с тем, что образцовые сопротивления плеч при уравновешивании моста изменяются ступенями, дискретно;
неточность изготовления плеч моста;
погрешность из-за влияния наведенных на измеряемый объект ЭДС переменного тока с частотой питающей сети или больших индустриальных импульсных помех;
погрешность от наличия конечного значения порога чувствительности сравнивающего устройства и его изменения (дрейфа);
погрешность из-за изменения температуры окружающего воздуха, колебания напряжения питания и т.д.
Указанные погрешности по закономерности подразделяются на систематические и случайные. Систематическая погрешность при повторных измерениях одной и той же величины остается постоянной или изменяется по известному закону. Случайная погрешность при повторных измерениях одной и той же величины изменяется случайным образом. Примерами систематических составляющих погрешностей могут быть погрешности из-за неточности изготовления резисторов плеч моста, из-за медленных изменений температуры воздуха. К случайным составляющим погрешности можно отнести погрешность дискретности, погрешность от наличия порога чувствительности сравнивающего устройства и его дрейфа, погрешности из-за влияния наводок, помех, колебаний напряжения питания и т.д.
Систематические погрешности могут быть исключены или существенно уменьшены благодаря устранению самих источников погрешностей (например, точной подгонкой сопротивлений резисторов плеч моста, применением термостабильных элементов и схем), а также путем введения поправок в показания прибора.
Указанные меры позволили в цифровом омметре свести к минимуму систематическую составляющую погрешности, которой можно пренебречь по сравнению со случайной составляющей.
В отличие от систематических погрешностей случайные погрешности не могут быть исключены из результатов измерения, так как возникают вследствие одновременного воздействия многих известных и неизвестных, зависимых и независимых причин, они непостоянны по абсолютной величине и знаку. Единственный путь уменьшения случайных погрешностей – увеличение количества измерений в одинаковых условиях. По полученным значениям определяется среднеарифметическое, которое считается наиболее вероятным значением измеряемой величины.
Для оценки точности результата измерений необходимо знать закон распределения случайных погрешностей. В практике электрических измерений один из наиболее распространенных законов распределения случайных погрешностей – нормальный закон (Гаусса).
Математическое выражение нормального закона распределения случайных погрешностей при измерении сопротивлений имеет вид:
 , (1.1)
, (1.1)
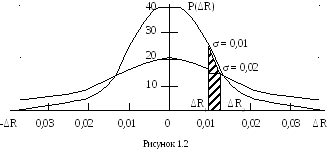
где P(∆R) – плотность вероятности случайной погрешности ∆R; σ – среднеквадратическая погрешность ряда из n наблюдений. Характер кривых, описываемых уравнением (1.1) для двух значений σ, показан на рис. 1.2.
Из кривых следует, что чем меньше σ, тем чаще встречаются малые случайные погрешности, т.е. тем точней выполнены измерения. Кривые симметричны относительно оси ординат, так как положительные и отрицательные погрешности встречаются одинаково часто. Вероятность P появления погрешности со значениями от ∆R1до ∆R2определяется площадью заштрихованного участка на рис.1.2 и вычисляется как определенный интеграл от функции P(∆R):
 .
.
Значения этого интеграла вычислены для различных пределов ±∆R и сведены в таблицы, приведенные в математических справочниках, а также в табл.1.3 настоящих методических указаний. Интеграл, вычисленный для пределов от ∆R1= – ∞ до ∆R2= +∞, равен единице, т.е. вероятность появления случайной погрешности в интервале от –∞ до +∞ равна единице. Это естественно, так как все погрешности имеют конечные значения.