

Задание для расчета нелинейной сау
Исследовать динамические режимы системы методом фазовой плоскости для заданной статической характеристики нелинейного элемента (НЭ).
Построить переходный процесс по полученной фазовой траектории.
Определить наличие автоколебаний в системе, оценить их устойчивость и рассчитать параметры.
Варианты задания для расчета нелинейной сау
|
Вариант задания |
Варианты структуры и нелинейного элемента |
|
|
|
|
|
h |
a |
b |
|
0 |
1 |
2 |
- |
- |
0,8 |
0,4 |
8 |
5 |
- |
|
1 |
2 |
5 |
2 |
6 |
- |
- |
1 |
1 |
- |
|
2 |
3 |
25 |
2 |
5 |
1 |
- |
1 |
1 |
2 |
|
3 |
1 |
3 |
- |
- |
0,7 |
0,8 |
4 |
3 |
- |
|
4 |
2 |
2 |
5 |
5 |
- |
- |
10 |
10 |
- |
|
5 |
3 |
6 |
5 |
2 |
4 |
- |
10 |
10 |
20 |
|
6 |
1 |
8 |
- |
- |
1 |
0,8 |
6 |
10 |
- |
|
7 |
2 |
1 |
10 |
2,5 |
- |
- |
10 |
10 |
- |
|
8 |
3 |
5 |
2 |
6 |
2 |
- |
15 |
15 |
30 |
|
9 |
1 |
2 |
- |
- |
1 |
0,8 |
5 |
5 |
- |
|
10 |
2 |
10 |
2 |
2 |
- |
- |
5 |
5 |
- |
|
11 |
3 |
1 |
5 |
2 |
6 |
- |
30 |
15 |
30 |
|
12 |
1 |
1 |
- |
- |
1 |
0,6 |
10 |
5 |
- |
|
13 |
2 |
4 |
5 |
5 |
- |
- |
5 |
5 |
- |
|
14 |
3 |
3 |
5 |
1 |
5 |
- |
25 |
10 |
30 |
|
15 |
1 |
0,5 |
- |
- |
0,8 |
0,6 |
10 |
20 |
- |
|
16 |
2 |
2 |
10 |
2,5 |
- |
- |
10 |
10 |
- |
|
17 |
3 |
8 |
2 |
2 |
4 |
- |
25 |
15 |
30 |
|
18 |
1 |
5 |
- |
- |
0,5 |
0,8 |
10 |
10 |
- |
|
19 |
2 |
4 |
5 |
4 |
- |
- |
10 |
10 |
- |
|
20 |
3 |
3 |
4 |
5 |
2 |
- |
10 |
15 |
25 |
|
21 |
1 |
5 |
- |
- |
1 |
0,15 |
20 |
10 |
- |
|
22 |
2 |
2 |
10 |
1 |
- |
- |
15 |
15 |
- |
|
23 |
3 |
3 |
5 |
2 |
5 |
- |
15 |
15 |
30 |
|
24 |
1 |
10 |
- |
- |
1 |
0,2 |
10 |
10 |
- |
|
25 |
2 |
4 |
5 |
5 |
- |
- |
10 |
10 |
- |
|
26 |
3 |
6 |
2 |
6 |
1 |
- |
10 |
25 |
35 |
|
27 |
1 |
5 |
- |
- |
1,5 |
0,3 |
20 |
10 |
- |
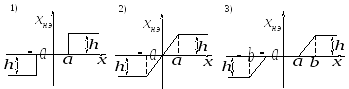
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Экзаменационные вопросы
Классификация систем автоматического управления.
Принципы линеаризации систем автоматического управления.
Использование дифференциальных и операторных уравнений при описании систем автоматического управления. Основные свойства преобразования Лапласа.
Передаточные функции систем автоматического управления.
Временные характеристики систем автоматического управления.
Частотные характеристики систем автоматического управления.
Характеристики пропорционального звена
Характеристики идеального дифференцирующего звена.
Характеристики апериодического звена первого порядка.
Характеристики реального дифференцирующего звена.
Характеристики инерционного звена второго порядка.
Характеристики звена чистого запаздывания.
Характеристики интегро-дифференцирующего звена.
Характеристики пропорционально-интегрирующего звена.
Эквивалентные преобразования структурных схем линейных систем автоматического управления.
Понятие устойчивости линейных систем автоматического управления. Необходимое и достаточное условия устойчивости. Прямой метод оценки устойчивости.
Алгебраический критерий устойчивости Гурвица.
Частотный критерий устойчивости Михайлова. Принцип аргумента.
Частотный критерий устойчивости Найквиста.
Устойчивость систем с запаздыванием.
Оценка качества процесса регулирования по переходной характеристике системы.
Частотные критерии качества.
Корневые критерии качества.
Интегральные критерии качества.
Оценка точности систем автоматического управления. Статические и астатические системы.
Коэффициенты ошибки системы.
Системы комбинированного управления.
Типы корректирующих звеньев в системах автоматического управления.
Частотный метод синтеза корректирующих устройств.
Последовательные корректирующие устройства..
Параллельные корректирующие устройства.
Техническая реализация корректирующих устройств.
Особенности нелинейных систем и методы их анализа.
Исследование нелинейных систем на фазовой плоскости.
Метод гармонической линеаризации нелинейных звеньев.
Методы определения параметров автоколебаний.