

1. Типы сигналов
Случайным называется сигнал, значение которого в каждый момент времени является случайной величиной.
Сигнал, известный в любой момент времени, называется детерминированным.
1. Каузальным называется колебание, имеющее начало во времени, которое можно рассматривать как причинное, т.к. оно может определяться как следствие какой-то причины. При описании каузальных колебаний удобно совместить начало отсчета времени с началом колебаний, которое будет равно 0 при t < 0
2. Периодическим называется колебание, которое задается на интервале − ∞ ≤ t ≤ +∞ и любое значение повторяется через интервалы времени,
равные Т (период):S (t) = S (t + T ).
3. Финитным называется колебание, локализованное во времени, т.е. колебание равное нулю вне некоторого ограниченного интервала времени t А ≤ t ≤ tВ
4. Непрерывным называется колебание, которое рассматривается в каждой точке оси времени, т.е. такое колебание задано на несчетном временном интервале
5. Дискретное колебание рассматривается только в фиксированный момент времени, т.е. заданное на счетном множестве временных точек
Обычно в динамических системах важным свойством является способность преобразовывать анализируемые гармоники по амплитуде и фазе:
Соотношение входного и выходного сигналов может описываться
S вых (t) = ∫ S вх (r)h(t − r )dr
0
Если на входе идеального дискретизатора, осуществляющего взятие отсчетов с заданной скоростью, составляющей N отсчетов в секунду, действует сигнал x(t ) , то на его выходах формируется дискретизированный во времени сигнал, определенный как:
N −1
~x (t) = ∆t ∑ x(m∆t )δ (t − m∆t ) ,(1.5)
m = 0
где δ (t)
- функция Дирака.
δ (t)- функция, равная 0 всюду, кроме начала координат. В начале координат данная функция принимает бесконечное значение и интеграл от нее по любому интервалу, содержащему начало координат, будет равен 1:δ (t) =0 при t ≠ 0 ; δ (0) = ∞+ε
∫δ (t)dt = 1 при любом ε > 0
−ε
Функцию, обладающую такими свойствами, можно получить как предел прямоугольного импульса, имеющего единичную площадь, когда
длительность этого импульса стремится к 0.
2. Задачи анализа и синтеза сигналов.
Проблемы извлечения, передачи и обработки информация являются центральными для многих областей науки и техники, например, связь, автоматическое управление и регулирование, радиолокационные системы, распознавание образов. С физической точки зрения сигнал создается определенным процессом, протекающим во времени.
Важнейшими формами аналитического выражения сигнала является представление записи этого сигнала с помощью колебаний или спектра
(временное или частотное представление).
Колебание s(t ) описывает сигнал как функцию от времени. Это основная форма аналитического выражения, поскольку t - естественная координата, с которой связаны все реальные явления. В свою очередь, сигнал можно рассматривать как совокупность элементарных функций ηk (t ), умноженных на коэффициент Ck определенного типа: и составляющих систему функций {ηk (t)}
∞
s(t ) = ∑Ckηk (t ) . (1.1)
k = 0
Система функций {ηk (t )}носит название базисной системы а представление сигнала в виде (1.1) называется разложением сигнала по системе базисных функций. Основными задачами теории сигналов являются:
1. анализ сигналов (изучение их свойств);
2. синтез сигналов (нахождение сигнала, обладающего заданными свойствами).
Для
отображения исходной функции времени
x(t ) в спектральной области служит, к
примеру, прямое преобразование Фурье:
а для восстановления функции по ее спектру – обратное преобразование
Фурье:
![]()
Структуру, с помощью которой можно воспроизвести задачи анализа и
синтеза, можно представить (рис. 1.1):
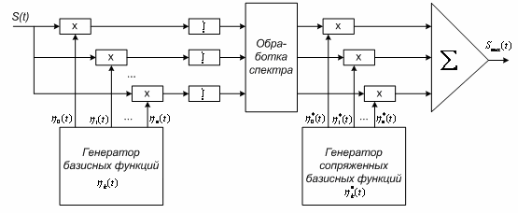
Рис. 1.1. Задачи анализа и синтеза сигналов