

Структурное развитие систем автоматизации экспериментов. Эволюция структур.
Структурное развитие систем автоматизации экспериментов
Развитие средств автоматизации экспериментов в значительной степени определяется возможностями микроэлектроники, при этом можно выделить следующие типы систем (Рис 9.3).
1.Специализированные информационно-измерительные (ИИС) и информационно-управляющие системы (ИУС) с блочной структурой и радиальными связями создавались аппаратурно в виде набора блоков. Вывод результатов осуществлялся на устройства печати, графопостроители и перфоленты. Позже их стали соединять с ЭВМ для прямой передачи результатов измерений на обработку. Это, по существу, были специализированные автоматы со средствами измерения и регистрации. В отдельных случаях создавали измерительно-регистрирующие центры на основе общих блоков памяти и средств вывода данных, получаемых от одного или нескольких мест измерения . Произвольные радиальные связи блоков приводили к усложнению таких систем и увеличению затрат на разработку индивидуальных приборных интерфейсов. Поэтому начали использовать магистраль данных, но с радиальным управлением выборкой. В дальнейшем стали разрабатывать специальные средства сопряжения (адаптеры) измерительных и управляющих устройств с ЭВМ. Приборные подсистемы выделяли в виде измерительных станций, соединяемых дискретными каналами с ЭВМ (центром обработки), от которых использовали выносные терминалы (Рис. 9.3,а).
2. Измерительные и управляющие системы на основе интерфейса ЭВМ стали создавать в связи с массовым выпуском мини-ЭВМ, которые приблизили к отдельным экспериментам. Малые размеры ЭВМ позволили использовать центральный процессор (ЦП) в качестве управляющего устройства измерительно-вычислительных (ИВК) и управляющих (УВК) комплексов, а стандартную периферию— для регистрации и выводов результатов (печать, перфоратор, дисплеи, магнитные диски и ленты). Приборные устройства при этом сопрягали непосредственно с каналами ввода-вывода мини-ЭВМ.
Сопряжения были (рис. 9.4) зависимыми от используемого конкретно типа ЭВМ и подразделялись на:
а) радиальные (СМ-1, СМ-2, НР 2100 и др);
б) сопряжения с двумя отдельными магистралями для блоков ЗУ и периферии (NОVА, РDР-8 и др.);
в) сопряжения с общей магистралью для памяти и всех устройств (РDР-11, СМ-4, Электроника-60 и др.).
Однако разнообразие типов ЭВМ не позволяло создавать совместимых приборных подсистем, число которых катастрофически возрастало, что приводило к огромным неоправданным затратам. Возникла проблема создания специальных не зависящих от типа ЭВМ приборных интерфейсов для систем различного быстродействия.
Наибольшее распространение получили системы на основе общей магистрали мини-ЭВМ типа СМ-4 и совмещенной магистрали (для адресации и данных) микро-ЭВМ типа “Электроника-60”. В СССР также получили распространение управляющие вычислительные машины (УВМ) и комплексы (УВК), представляющие собой мини-ЭВМ, ориентированные на задачи управления измерениями и сбором данных. Преимуществом таких систем является прямая связь приборов с ЭВМ и использование стандартного программного обеспечения ЭВМ, а недостатком — несовместимость разных типов ЭВМ и систем.
3. Системы на основе специальных приборных интерфейсов, не зависящих от типа ЭВМ, сопрягаемых с мини-ЭВМ, решили проблему совместимости средств измерения и управления в системах. Наибольшее распространение в международной практике получили не зависимые от типа ЭВМ системы с байтовой магистралью типа НР (фирмы НР) и параллельные магистрально-модульные системы, удовлетворяющие международным стандартам КАМАК. Байтовые интерфейсы встраивали в приборы и соединяли магистральным кабелем связи с ЭВМ, что позволило обеспечить системную совместимость существующих приборов невысокого быстродействия с различными типами ЭВМ. Модульные системы на основе ЭВМ ориентированы на создание банков совместимых модулей (например, КАМАК) различными организациями и странами, имеющими стандартный интерфейс выхода на магистраль секции параллельного типа (до 24 разрядов) для быстрых систем сбора и управления.
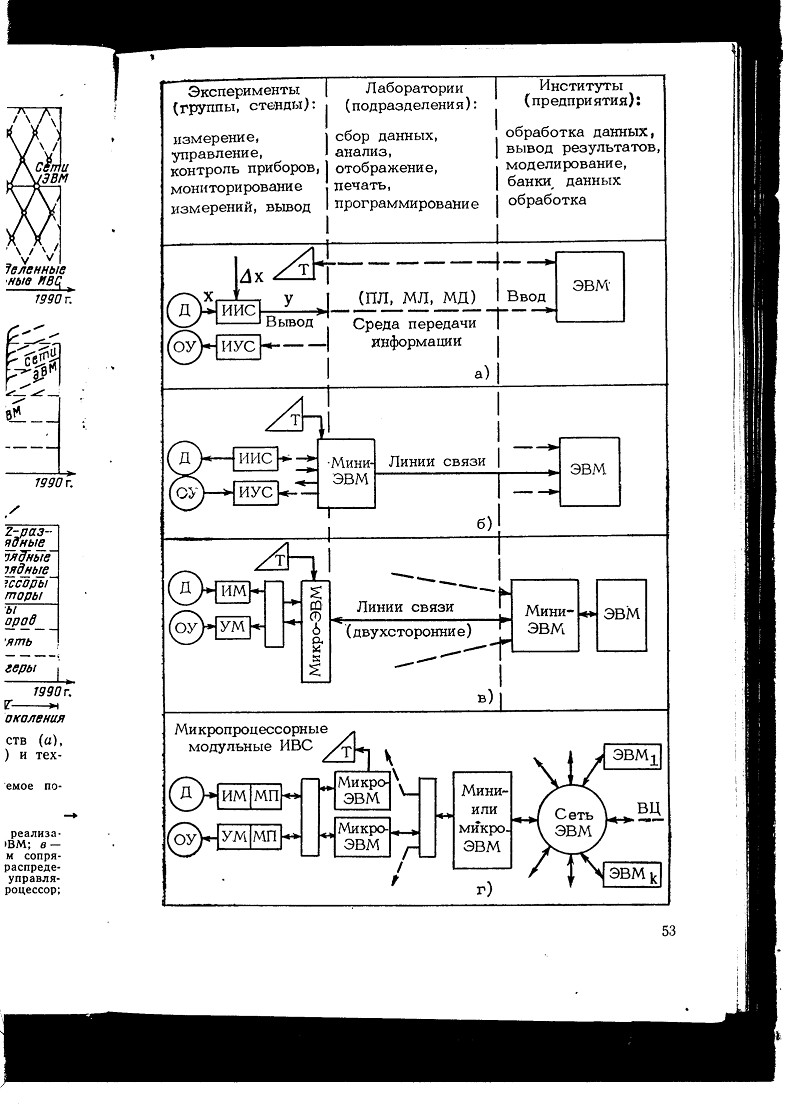
Рис. 9.3. Системы автоматизации на основе ЭВМ: а — измерительные ИИС и управляющие ИУС системы с аппаратурной реализацией; б — системы с индивидуальным сопряжением на основе мини-ЭВМ; в - магистральные информационно-измерительные системы со стандартным сопряжением; г — многопроцессорные магистральные модульные системы распределенного управления и обработки; ИМ — измерительные модули; УМ — управляющие модули; Т —терминал; ОУ — объект управления; МП — микропроцессор; ПЛ — перфолента; Д —датчики
В СССР такие системы на основе мини-ЭВМ получили название измерительно-вычислительных комплексов (ИВК). В качестве основного типа мини-ЭВМ была выбрана серия программно-совместимых машин типа СМ-4. Появление большого парка микро-ЭВМ позволило поставить задачу создания микро-ИВК с теми же возможностями. С появлением микропроцессов начали создавать встраиваемые модули на их основе, возникли модульные информационно-вычислительные системы (ИВС) в виде распределенных микропроцессорных структур.
4. Микропроцессорные распределенные информационно-вычислительные системы используют программно-совместимые серии процессоров, включая микропроцессоры, микро-ЭВМ и центральную мини-ЭВМ, мощность которой существенно возрастает в связи с переходом с 16-разрядных процессоров на 32-разрядные. Производительность микропроцессоров приближается к производительности мини-ЭВМ предыдущего поколения. На повестке дня уже не стоит разработка 32-разрядных микропроцессоров. Поэтому возникает проблема создания гибких микропроцессорных структур магистрально-модульного типа, наиболее согласованных с требованиями решаемых задач автоматизации, т. е. для малых систем невысокой производительности использовать 8-разрядные процессоры, для средней 16-разрядные, а для высокой производительности 32-разрядные процессоры.
Для разного быстродействия системы ориентируют на разную технологию: для низкого быстродействия КМОП, для среднего — ТТЛ, для высокого —ЭСЛ и ТТЛШ. Одновременно разрабатывают различные интерфейсы последовательного и параллельного типов с арбитражем магистрали для работы многих процессоров.
Новые модульные системы (Р-896, УМЕ, ФАСТБАС) включают как параллельный интерфейс для основных задач, так и последовательный интерфейс для контроля, инициирования сложных систем, диагностики и решения вспомогательных задач.
Во многих современных ИВС применяют стандарты типа НР (с байтовым кабельным интерфейсом) и КАМАК (с параллельным интерфейсом на магистраль секции). При этом малые ИВС иногда используют с микро-ЭВМ в бездисковом варианте (резидентное программное обеспечение), средние ИВС представляют собой обычно дисковые системы реального времени, а большие ИВС содержат несколько ЭВМ, объединяемых в сложные комплексы.
Микро-ЭВМ, входящие в состав измерительной и управляющей аппаратуры, работают с мини-ЭВМ в режиме разделения времени. Получает развитие новый класс систем, использующий много процессоров (ансамбль) для автоматизации одного эксперимента. При этом используют встраиваемые процессоры без периферии, работающие под управлением центральной ЭВМ
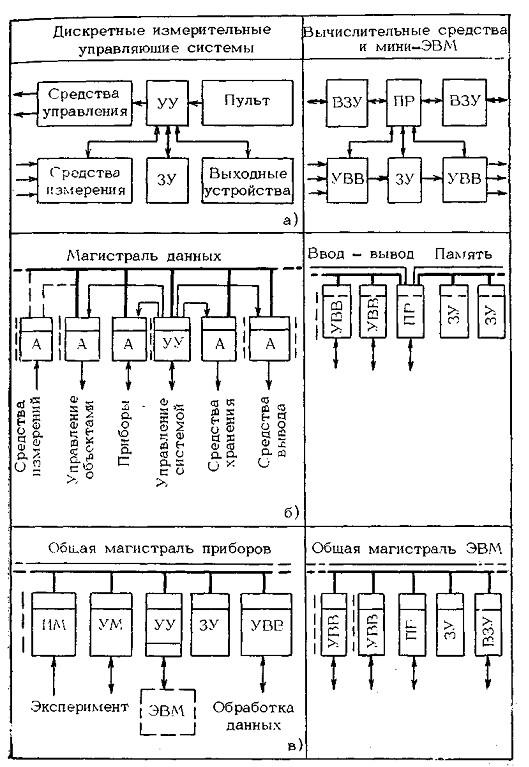
Рис. 9.4. Эволюция структуры измерительных и вычислительных систем: а — радиальная структура связей ИИС, ИУС и мини-ЭВМ; б — магистраль обмена данными в ИИС, ИУС и ЭВМ; в — общая магистраль данных, адресов и управления для ИИС и ЭВМ; А — адаптеры сопряжения; УУ — устройство управления; ИМ — измерительные модули; УМ — управляющие модули; ЗУ — запоминающее устройство; УВВ — устройство ввода-вывода; ПР — процессор; ВЗУ — внешнее запоминающее устройство.
. Другое направление развития — терминальные ИВС для измерения и управления, выполняемые в виде выносных рабочих станций с терминалом, имеющие доступ к файлам центральной ЭВМ. С развитием микропроцессоров и микро-ЭВМ оказывается возможным создавать достаточно мощные системы сбора и анализа данных из набора относительно дешевых средств. По существу с развитием модульных систем, включающих наряду с параллельным и последовательный канал связи, решается проблема создания локальных сетей модульных ИВС в экспериментах.
Важным качеством таких распределенных модульных систем является совместимость компонентов, основанная на использовании унифицированных аппаратурных и программных средств, при этом различают следующие требования к совместимости систем:
1) информационные, обеспечиваемые стандартизацией интерфейсов;
2) программные, обеспечиваемые выбором средств программирования (языков, операционных систем и прикладного программирования в реальном масштабе времени);
3) энергетические, основанные на унификации источников питания;
4) конструктивные, включающие стандартизацию секций (крейтов), модулей (блоков) и соединителей (разъемов);
5) метрологические, предполагающие единство средств измерения, обеспечивающих расчет характеристик с учетом аппаратурных и программных средств;
6) электрические, использующие типовые методы передачи и приема сигналов согласно стандартному протоколу связи.
Первые типовые ИВК были предназначены для автоматизации общефизических экспериментов (ИВК-1, ИВК-2), для оптических приборов в задачах спектроскопии (ИВК-3), для геофизических задач (ИВК-5) и др.
9.2.Физико-технические проблемы автоматизации научных исследований
При разработке систем автоматизации необходимо учитывать физико-технические возможности создания средств, что можно свести к следующим основным вопросам:
1) элементная база (технология), определяющая потенциальное быстродействие, надежность, потребляемую мощность, радиационную стойкость, функциональные возможности, габаритные размеры и другие характеристики разрабатываемых устройств;
2) унификация уровней взаимодействия и связи устройств, стандартизация их сопряжения, передача сигналов и сообщений;
3) функциональное магистрально-модульное построение систем в зависимости от выбора конструктивов и соединителей для выполнения электронного оборудования до общей структуры и организации систем;
4) энергетические проблемы (питание, разводка), охлаждение аппаратуры до рабочей температуры и др.
Развитие микропроцессоров показало, что они, как и мини-ЭВМ, достигают возможностей больших ЭВМ предшествующих поколений. Уже широко применяются в экспериментах как мини-ЭВМ, имеющие 32 разряда (например VАХ-11, IBM PC США),так и микропроцессоры такой же разрядности. При этом очень важен вопрос использования программно-совместимых серий микропроцессоров, микро- и мини-ЭВМ для совместного использования средств в единых системах.
Реализация программного обеспечения системы автоматизации экспериментов в SCADA TRACE MODE с использованием компонентных технологий.
Реализация программного обеспечения системы автоматизации экспериментов в SCADA TRACE MODE с использованием компонентных технологий
Разработка программного обеспечения современных систем автоматизации экспериментов (САЭ) на электрофизических установках представляет собой сложную и неоднозначную задачу. Ведь в создании данного ПО имеется ряд существенных особенностей: неоднородность потоков информации, отсутствие заданного технологического регламента работы, наличие сложных форм визуализации потоков информации. Все это предполагает альтернативный подход к решению данной задачи. Рассмотрим один из вариантов реализации СЭА в SCADA TRACE MODE с использованием компонентных технологий.
Система автоматизации экспериментов (САЭ) на термоядерной материаловедческой установке КТМ, проектируемой в настоящее время в Национальном ядерном центре Республики Казахстан, имеет трехуровневую структуру, представленную на рис. 1. Нижний уровень (уровень I) системы управления включает в себя малоканальные контроллеры, выполняющие задачи управления отдельными блоками и агрегатами технологических систем, системы цифрового управления источниками питания электромагнитной системы, а также модули сбора данных диагностических систем. Средний уровень (уровень II) включает промышленные контроллеры и компьютеры, обеспечивающие координацию работы контроллеров первого уровня в рамках технологической подсистемы и их синхронизацию в ходе эксперимента.
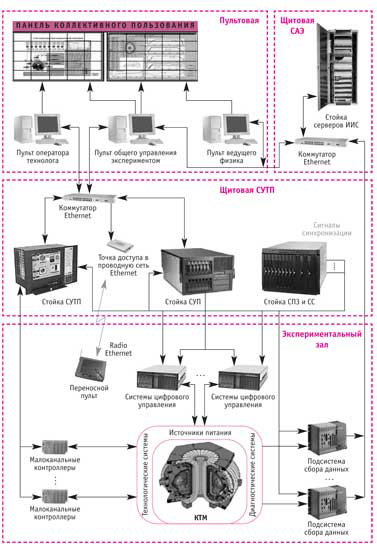
Рис. 1. Структурная схема системы автоматизации токамака КТМ
Верхний уровень (уровень III) САЭ токамака КТМ включает в себя:
к многотерминальный пульт главного оператора КТМ, который состоит из пульта общего управления экспериментом, пульта оператора технолога и пульта ведущего физика, обеспечивающих визуализацию на мнемосхемах параметров технологических систем и результатов физического эксперимента;
- панель коллективного пользования (ПКП), на которой отображается мнемосхема комплекса установки КТМ, выполняется предупредительная и аварийная сигнализация, а также представляются основные параметры эксперимента;
- стойка серверов информационно-измерительной системы (ИИС).
Основными функциями третьего уровня СУТП являются: объединение в одну управляющую систему всего технологического оборудования КТМ; обработка, регистрация, представление технологической и экспериментальной информации на графических мнемосхемах и ее документирование; анализ аварийных ситуаций, формирование сообщений предупредительной сигнализации, отработка алгоритмов общей аварийной защиты КТМ.
Общая структурная схема программного обеспечения системы показана на рис. 2 и состоит из следующих основных частей: программное обеспечение технологических и диагностических подсистем I уровня, программное обеспечение ЭВМ стойки СУТП, осуществляющей общее управление процессом вакуумно-технологической подготовки, программное обеспечение ЭВМ стойки СУП для управления плазменными процессами и источниками питания электромагнитной системы (ЭМС), программное обеспечение ЭВМ стойки системы синхронизации и противоаварийной защиты (СС и СПЗ), выполняющей координацию работы систем управления, их синхронизацию, а также функции защит и блокировок по комплексу в целом.
Важное место в структуре программного обеспечения САЭ занимает ПО верхнего уровня, поэтому уделим особое внимание макетированию функций, решаемых на данном уровне, и механизмов межуровневой передачи данных.
Разработка программного обеспечения современных систем автоматизации экспериментов (САЭ) на электрофизических установках представляет собой сложную задачу, успешное решение которой определяется многими факторами. В качестве наиболее значимых из них можно выделить:
- соответствие принятой на этапе технического проектирования САЭ архитектуры программного обеспечения системным требованиям;
- качество организации процесса разработки программного кода с возможностью контроля результатов разработки и их верификации;
- эффективность применения современных технологий программирования и специальных средств разработки, выбранных для реализации программного обеспечения системы.
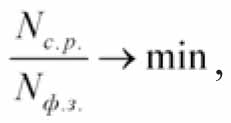
Настоящая статья посвящена третьему из названных факторов, а именно, рассмотрению вопросов повышения эффективности использования SCADA-системы TRACE MODE, как специального средства разработки программного обеспечения автоматизированных систем, при реализации САЭ термоядерной установки типа токамак. За критерий эффективности в этом случае принято следующее выражение:
 (1)
(1)
где Nc.p. - количество различных средств разработки и программных технологий, используемых при реализации программного обеспечения САЭ;
Nф.з. - количество функциональных задач системы, реализованных этими средствами.
Обеспечить минимум критерия (1), достигаемый при Nc.p. = 1 в случае САЭ, затруднительно, поскольку САЭ электрофизической установки, как отмечается в [1], характеризуется в отличие от АСУ ТП такими особенностями, как: отсутствие заданного технологического регламента работы, неоднородность потоков информации, циркулирующих в системе, и наличие сложных форм визуализации экспериментальных данных. Названные особенности САЭ заставляют разработчиков программного обеспечения наряду с классическими средствами SCADA-систем обращаться к использованию дополнительных инструментов, например, интерпретаторов командных языков, программ символьного анализа, ОС и СУБД реального времени, систем обработки и визуализации многомерных данных и результатов измерения быстропротекающих процессов. Следствием этого является существенное усложнение и удорожание всего программного комплекса САЭ.

Рис. 2. Архитектура программного обеспечения САЭ токамак КТМ
Авторами статьи принят альтернативный подход к разработке программного обеспечения САЭ, который предполагает расширение функциональных возможностей SCADA-системы TRACE MODE, как основного средства программирования алгоритмов управления технологическими процессами экспериментального комплекса, на основе применения компонентных технологий ActiveX и ОРС.
ActiveX-технология в данном случае рассматривается как гибкое средство, позволяющее практически неограниченно развивать пользовательский интерфейс оператора САЭ. Причем необходимость написания собственных ActiveX-объектов может быть сведена до минимума при условии приобретения стандартных библиотек ActiveX-компонентов, специально ориентированных на решение задач автоматизации, например, таких как Iocomp Instrumentation Components (“Iocomp Software”, Канада) или ComponentWorks (“National Instruments”, США).
OPC-технология, в свою очередь, рассматривается как средство развития возможностей SCADA-системы по обработке неоднородных потоков данных, а также как средство интеграции SCADA с программируемыми приборами, встроенными элементами управления и специализированными контроллерами с магистрально-модульной архитектурой (выполненными в стандарте VME, CAMAC), число которых в составе САЭ достаточно велико.
Остановимся более детально на рассмотрении проблем реализации визуальных форм пользовательского интерфейса для пультов САЭ с использованием ActiveX-компонентов и интеграции этих компонентов в SCADA-систему TRACE MODE. Следует отметить, что такой акцент в данном случае сделан не случайно и вызван повышенными требованиями, предъявляемыми в САЭ к функциям визуализации экспериментальных данных, как после экспериментальной обработки, так и в реальном масштабе времени при проведении экспериментов. Кроме этого, в состав средств отображения информации САЭ входит ряд пультов и панелей коллективного пользования (ПКП), различных по своему функциональному назначению, отличающихся составом и формой представления выводимой информации и обеспечивающих одновременную совместную работу операторов САЭ и ученых-исследователей по управлению экспериментальным комплексом и выполнению программы эксперимента. Следовательно, программное обеспечение пультов составляет существенную часть всего программного комплекса САЭ, которая фактически определяет эксплуатационную эффективность системы, и упрощение ее разработки является весьма актуальным.
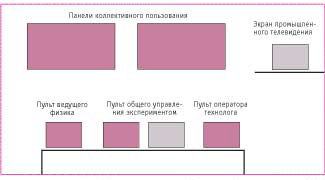
Рис.3. Размещение средств отображения информации в пультовой САЭ
Размещение средств отображения информации в пультовой САЭ показано на рис. 3.
Пульт оператора-технолога предназначен для наблюдения за процессами вакуумно-технологической подготовки камеры токамака к экспериментам. Для создания графического интерфейса этого пульта достаточно использования базовых возможностей TRACE MODE.
Пульт ведущего физика используется для отображения в паузах между плазменными разрядами результатов эксперимента, часть которых представлена функциями, зависящими как от пространственных, так и от временных координат.
Особое значение в САЭ имеет пульт общего управления экспериментом. Данный пульт используется главным образом в пусковом режиме работы установки, в течение которого инженер-исследователь должен иметь возможность на основе анализа комплексной информации о состоянии технологических систем и параметрах плазменных процессов оперативно вводить изменения в программу эксперимента, контролировать готовность подсистем САЭ к экспериментам, в интерактивном режиме вводить команды пуска и остановки плазменных разрядов.
ПКП предназначены для вывода обобщенной информации о ключевых параметрах технологических систем комплекса, результатов анализа аварийных и предаварийных ситуаций, целевых и достигнутых параметрах плазмо-физических процессов.
При разработке графического интерфейса пультов естественным является стремление применить единый инструментарий - TRACE MODE 5, что позволит сократить объем подготавливаемых визуальных форм отображения, обеспечит гибкость при компоновке и унификацию мнемосхем как в пределах графического пространства одного пульта, так и для группы пультов САЭ.
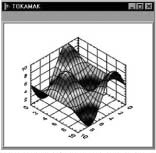
Рис.4. Active- X форма и компонент 3D graph
Далее рассмотрим процесс подготовки и включения ActiveX -объектов в графическое пространство TRACE MODE и покажем приемлемость этого решения для визуализации трехмерной функции распределения плотности тока Jp(R,z) по сечению плазменного шнура. В качестве базового при этом взят визуальный компонент 3DGraph из библиотеки ComponentWorks (рис. 4), который предоставляет трехмерное графическое ядро и позволяет строить 3D графики. Чтобы упростить разработку ActiveX-приложений, должна быть выбрана программная платформа, которая позволяла бы модифицировать базовые компоненты ActiveX, вне зависимости от среды разработки. В качестве такой платформы выбрана система программирования Delphi фирмы Borland, обеспечивающая гибкий механизм создания визуальных компонент ActiveX в специально созданной для этих целей среде программирования, называемой DelphiActiveX (DAX) [2].
Механизм создания ActiveX-компонент в среде DAX включает пять этапов. Подключение созданного средствами DAX-компонента 3D_Plot к TRACE MODE выполняется с помощью редактора представления данных (РПД), который позволяет разместить на экране проекта ActiveX-компонент из состава зарегистрированных в системе. При установке компонента автоматически открывается его страница свойств, в которой выполняется привязка свойств компонента к каналам TRACE MODE и выбирается направление передачи данных: привязка типа ВХОД - значение свойства канала передается свойству компонента; привязка типа ВЫХОД - значение свойства компонента передается свойству канала (рис. 5). На рис. 6 показан результат выполнения компоненты 3D_Plot в режиме эмуляции проекта TRACE MODE.
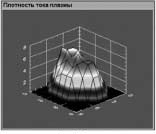
Рис. 5. Этап редактирования свойств в Trace Mode
Общая структурная схема программного комплекса САЭ подробно рассмотрена в [1]. С целью проверки работоспособности созданного компонента в условиях САЭ выделены основные элементы программной структуры, обеспечивающие получение, передачу и отображение измерительной информации. Схема взаимодействия этих программных элементов показана на рис. 7. Сервер архивирования и доступа к оперативным данным функционирует под управлением операционной системы Linux с ядром, модифицированным для решения задач реального времени. Назначение сервера заключается в координации информационных потоков между ЭВМ верхнего уровня САЭ и подсистемами управления технологическими процессами и диагностическими комплексами информационно измерительной системы. Программное обеспечение сервера сбора данных состоит из двух частей: часть, взаимодействующая с технологическими и диагностическими подсистемами через внешние порты, и часть, обеспечивающая обмен информацией с ЭВМ верхнего уровня, к которым, в частности, относятся и ЭВМ операторских пультов.
Промежуточным звеном между этими частями выступает динамическая база данных технологической и диагностической информации, размещаемая в оперативной памяти. Эта область памяти циклически обновляется в результате информационного обмена сервера доступа к оперативным данным с подсистемами управления и диагностики. Программное обеспечение сервера выполняет предварительную обработку получаемой измерительной информации и вычисление результатов косвенных измерений. Так, в частности, на основе результатов измерения внешнего магнитного поля плазмы вычисляются параметры профиля плотности тока Jp(R,z) в сечении плазменного шнура. Полученные при этом значения плотности тока плазмы в виде двумерного массива передаются в МРВ TRACE MODE, работающий на ЭВМ пульта общего управления. Так как прямой информационный обмен МРВ и сервера архивирования невозможен, для решения этой задачи выполнена разработка дополнительного программного модуля, называемого транслятор запросов.
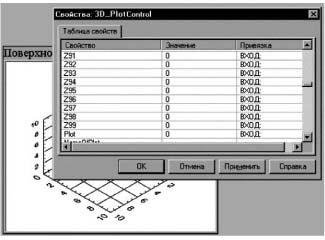
Рис. 6. Выполнение компонента в режиме эмуляции
Транслятор запросов выполняется на клиентской машине и преобразует программные запросы, поступающие от мониторов реального времени TRACE MODE, в формат, удобный для последующей передачи, по сетевому протоколу TCP/IP к серверу доступа к оперативным данным. В свою очередь, для передачи данных между транслятором и МРВ TRACE MODE используется протокол DDE, поддерживаемый TRACE MODE.
Важно отметить, что необходимость использования транслятора запросов отпадет при переходе на TRACE MODE версии 6, в которой для организации сетевого обмена будет использоваться транспортный протокол TCP/IP [3]. Поступающие в МРВ от транслятора запросов данные пересылаются в базу каналов TRACE MODE. Затем 3D_Plot-компонент отрабатывает поступающие из каналов МРВ значения, в результате чего происходит построение зависимости Jp(R,z) и ее перерисовка в темпе изменения плазменного процесса.
В результате проведенных испытаний программного комплекса, построенного в соответствии со схемой, показанной на рис. 5, была подтверждена работоспособность ActiveX-компонент совместно с монитором реального времени TRACE MODE.
Достигаемые при этом характеристики по скорости перерисовки форм и качеству графического представления данных измерения многомерных функций удовлетворяют системным требованиям. Повышение эффективности применения TRACE MODE достигается в данном случае за счет совмещения в общем графическом пространстве пульта общего управления экспериментом и пульта ведущего физика, а также панелей коллективного пользования как параметров технологических систем экспериментального комплекса, так и параметров плазмо-физических процессов. При этом исключается необходимость в использовании специализированных программ обработки и визуализации экспериментальных данных.
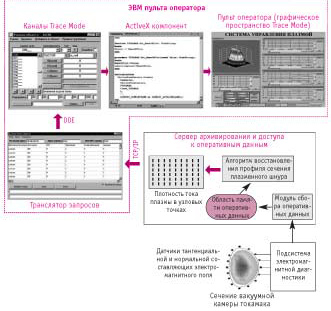
Рис. 7. Схема взаимодействия основных программных элементов САЭ