

7. Сложное движение точки
7.1. Основные определения. Абсолютная и относительная производные от вектора
В некоторых случаях целесообразно изучать движение точки одновременно по отношению к двум системам координат, одна из которых совершает заданное движение по отношению к другой (основной), принимаемой за неподвижную.
Будем называть сложным или «абсолютным» движением точки ее движение по отношению к системе координат, выбранной за основную. Движение точки по отношению к подвижной системе координат будем называть относительным. Под переносным движением будем понимать движение подвижной системы координат относительно неподвижной.
Далее мы встретимся
с необходимостью дифференцирования
вектора, определенного в системе
координат, которая может двигаться
произвольным образом. В связи с этим
введем понятия абсолютной и
относительной производных
вектора. Пусть даны основная система
координат и подвижная система координат,
которая совершает произвольное движение.
Пусть какой-либо вектор
определен в подвижной системе координат,
т.е. проекции этого вектора
![]() на оси подвижной системы – заданные
функции времени. Если i, j,
k – единичные векторы подвижной
системы координат, то вектор
на оси подвижной системы – заданные
функции времени. Если i, j,
k – единичные векторы подвижной
системы координат, то вектор
![]() может быть представлен в виде
может быть представлен в виде
![]() . (7.1)
. (7.1)
Дифференцируя обе части равенства (7.1) по времени, будем, иметь в виду, что векторы i, j и k вследствие движения подвижной системы координат меняют свое направление, т.е. являются функциями времени.
Таким образом, абсолютная производная вектора по времени будет равна
![]() . (7.2)
. (7.2)
Сумма первых трех слагаемых, представляющая собой производную от вектора в подвижной системе координат, называется относительной или локальной производной
![]() . (7.3)
. (7.3)
Заменяя в формулах (3.9) и (6.10) радиус-вектор последовательно на i, j и k, получим
![]() .
.
Поэтому сумма последних трех слагаемых в (7.2) может быть представлена в виде
 (7.4)
(7.4)
где – угловая скорость подвижной системы координат.
Следовательно,
![]() . (7.5)
. (7.5)
Таким образом, абсолютная производная вектора равна сумме относительной производной этого вектора и векторного произведения угловой скорости подвижной системы координат на этот вектор.
7.2. Теорема о сложении скоростей
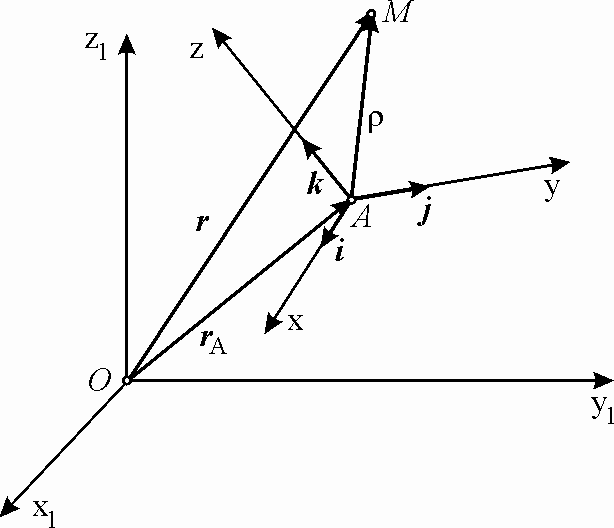
Рис. 7.1. |
Выбирая систему координат Oxly1z1 за основную, предположим, что система координат Ахуz движется по отношению к основной системе произвольным образом (рис. 7.1). Скорость произвольной точки М по отношению к основной системе координат называется абсолютной скоростью. |
Скорость
![]() точки по отношению к подвижной системе
координат называется относительной
скоростью. Переносной скоростью
точки по отношению к подвижной системе
координат называется относительной
скоростью. Переносной скоростью
![]() точки называется скорость той точки
подвижной системы координат, с которой
в данный момент совпадает движущаяся
точка.
точки называется скорость той точки
подвижной системы координат, с которой
в данный момент совпадает движущаяся
точка.
Если радиус-вектор
![]() определяет положение точки М по
отношению к системе координат Ох1у1z1,
радиус-вектор
определяет положение точки М по
отношению к системе координат Ох1у1z1,
радиус-вектор
![]() определяет положение начала системы
координат Ахуz в системе
Ох1у1z1,
а радиус-вектор
определяет положение начала системы
координат Ахуz в системе
Ох1у1z1,
а радиус-вектор
![]() определяет положение точки М в
системе координат Ахуz,
то в соответствии с рис. 7.1 имеем
определяет положение точки М в
системе координат Ахуz,
то в соответствии с рис. 7.1 имеем
![]() . (7.6)
. (7.6)
Пусть координаты
точки в подвижной системе координат
будут х, у и z; тогда ![]() ,
,
где i, j, k – единичные векторы осей подвижной системы координат.
По определению абсолютная производная радиуса-вектора по времени будет абсолютной скоростью точки. Следовательно, дифференцируя равенство (7.6) по времени, найдем абсолютную скорость точки
![]() . (7.7)
. (7.7)
Так как вектор определен в подвижной системе координат, то для нахождения абсолютной производной от него воспользуемся формулой (7.5):
![]() , (7.8)
, (7.8)
где – угловая скорость подвижной системы координат, а
![]()
представляет собой относительную производную от по времени. Согласно определению это будет относительная скорость точки, т.е.
![]() . (7.9)
. (7.9)
Подставляя выражения (7.8) и (7.9) в соотношение (7.7), получим
![]() , (7.10)
, (7.10)
где
![]() – скорость
начала подвижной системы координат по
отношению к основной.
– скорость
начала подвижной системы координат по
отношению к основной.
Для определения
переносной скорости точки закрепим ее
в подвижной системе координат, т.е.
положим в формуле (7.10)
![]() ,
тогда получим
,
тогда получим
![]() . (7.11)
. (7.11)
Таким образом, имеем
![]() , (7.12)
, (7.12)
т. е. абсолютная скорость точки равна геометрической сумме переносной и относительной скоростей.