

6.3. Ускорения точек тела, имеющего одну неподвижную точку
Введем прежде всего понятие углового ускорения. Угловым ускорением называется производная угловой скорости по времени, т.е.
![]() . (6.15)
. (6.15)
Рис. 6.4. |
Из определения видно, что вектор углового ускорения можно рассматривать как скорость конца вектора (рис. 6.4). Угловое ускорение направлено по касательной к годографу вектора угловой скорости (рис. 6.4), поэтому его направление может быть каким угодно в зависимости от закона изменения |
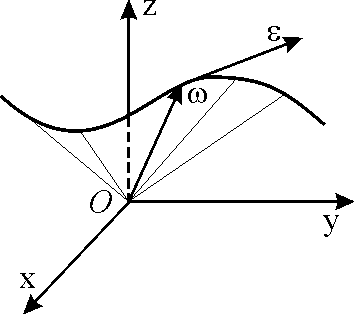
вектора угловой скорости. Заметим попутно, что годограф вектора угловой скорости – кривая, лежащая на неподвижном аксоиде (рис. 6.4).
Перейдем теперь к определению ускорения произвольной точки тела. Исходя из определения ускорения и используя равенство (6.10), получим
![]() .
.
Но ![]() , а
,
, а
,
следовательно,
. (6.16)
Таким образом,
ускорение
может быть представлено как сумма двух
ускорений:
![]() и
и
![]() .
.
Ускорение
![]() называется вращательной
составляющей ускорения. Модуль этого
ускорения равен
называется вращательной
составляющей ускорения. Модуль этого
ускорения равен
![]() ,
,
где ![]() – расстояние
от точки М до вектора
.
Направлено это ускорение перпендикулярно
плоскости векторов
и
в ту сторону, откуда кратчайший переход
от вектора
к вектору
виден против хода часовой стрелки.
Заметим, что вследствие несовпадения
направлений угловой скорости и углового
ускорения вращательная составляющая
ускорения может быть направлена по
отношению к направлению скорости под
любым углом, оставаясь перпендикулярной
вектору
.
В этом существенное различие между
вращением твердого тела вокруг неподвижной
оси и движением тела, имеющего одну
неподвижную точку.
– расстояние
от точки М до вектора
.
Направлено это ускорение перпендикулярно
плоскости векторов
и
в ту сторону, откуда кратчайший переход
от вектора
к вектору
виден против хода часовой стрелки.
Заметим, что вследствие несовпадения
направлений угловой скорости и углового
ускорения вращательная составляющая
ускорения может быть направлена по
отношению к направлению скорости под
любым углом, оставаясь перпендикулярной
вектору
.
В этом существенное различие между
вращением твердого тела вокруг неподвижной
оси и движением тела, имеющего одну
неподвижную точку.
Рис. 6.5. |
Ускорение
направлено по перпендикуляру к
плоскости векторов
и
,
т.е. по направлению вектора d
(рис. 6.5), имеющего начало в точке М
и конец в основании перпендикуляра,
опущенного из точки М на мгновенную
ось вращения. Модуль векторного
произведения
равен т.к. |
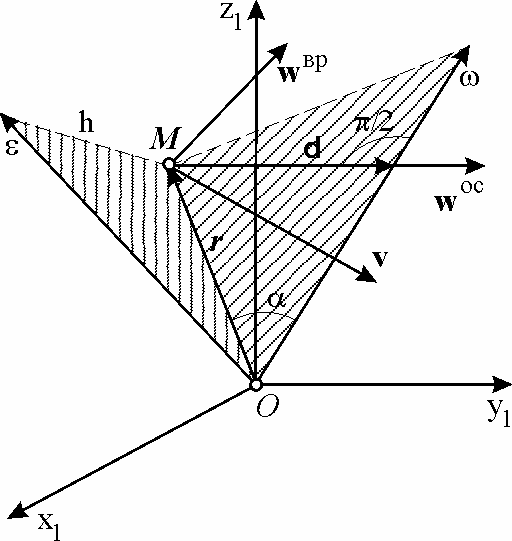
Следовательно, можно записать
![]() . (6.17)
. (6.17)
Это ускорение называется осестремительной составляющей ускорения.
Итак, ускорение любой точки тела равно сумме вращательной и осестремительной составляющих ускорения
![]() . (6.18)
. (6.18)
6.4. Движение свободного твердого тела
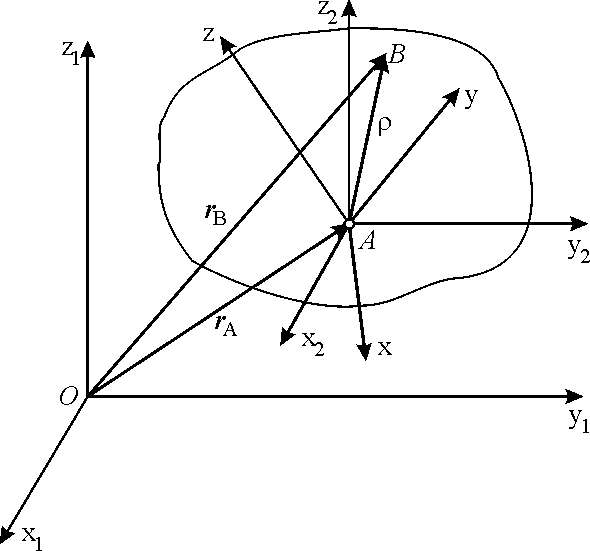
Рассмотрим движение свободного твердого тела. Введем, кроме неподвижной системы координат Ох1y1z1 еще подвижную систему координат Aх2y2z2, перемещающуюся поступательно относительно осей Ох1y1z1 и связанную с телом только в одной точке – точке А, и подвижную систему координат Axyz, жестко связанную с телом (рис. 6.6). В подвижной системе
Рис. 6.6. |
координат Aх2y2z2
тело имеет одну закрепленную в ней
точку – точку А, следовательно,
тело в этой системе координат участвует
в движении, рассмотренном нами в
предыдущем параграфе. Для того чтобы
задать положение тела в подвижной
системе координат Aх2y2z2,
можно ввести три угла Эйлера
|
положения относительно неподвижной системы координат нужно, кроме того, задать положение точки А, для чего потребуется знать еще три величины: xlA, ylA, zlA. Таким образом, положение свободного твердого тела определяется шестью независимыми параметрами: xlA, ylA, zlA, .
Перейдем к определению скоростей точек свободного тела. Скорость произвольной точки В равна производной от ее радиуса-вектора по времени. Пользуясь рис. 6.6, найдем
.
Следовательно,
![]() . (6.19)
. (6.19)
Заметим, что
![]() – скорость
точки А; кроме того, вектор
– скорость
точки А; кроме того, вектор
![]() представляет собой скорость точки В
относительно подвижной системы координат
Aх2y2z2,
в которой тело имеет одну закрепленную
точку. Следовательно, согласно формуле
(6.10)
представляет собой скорость точки В
относительно подвижной системы координат
Aх2y2z2,
в которой тело имеет одну закрепленную
точку. Следовательно, согласно формуле
(6.10) ![]() .
.
Таким образом, формулу (6.19) можно переписать в виде
![]() . (6.20)
. (6.20)
Здесь – угловая скорость вращения тела относительно системы координат Aх2y2z2. (Так же как и для плоского движения, можно показать, что угловая скорость не зависит от выбора полюса).
Формулу (6.20) можно прочитать следующим образом: скорость любой точки свободного твердого тела геометрически складывается из скорости произвольно выбранного полюса и скорости этой точки во вращательном движении тела относительно полюса.
Пользуясь формулой (6.20), можно доказать следующую теорему:
Проекции скоростей двух точек свободного твердого тела на прямую, проходящую через эти точки, равны, между собой.
Согласно равенству (6.20) имеем
![]() ,
,
но вектор
![]() перпендикулярен вектору
перпендикулярен вектору
![]() ;
следовательно,
;
следовательно,
![]() и
.
Определим ускорения точек свободного
твердого тела. Для этого продифференцируем
по времени равенство (6.20):
и
.
Определим ускорения точек свободного
твердого тела. Для этого продифференцируем
по времени равенство (6.20):
![]() . (6.21)
. (6.21)
Замечая, что
![]() ,
– угловое
ускорение тела в подвижной системе
координат Aх2y2z2,
а
,
получим
,
– угловое
ускорение тела в подвижной системе
координат Aх2y2z2,
а
,
получим
![]()
Используя (6. 17), можно записать
![]() .
.
где
![]() – вектор,
имеющий начало в точке В, а конец в
основании перпендикуляра, опущенного
из В на
(рис. 6.7).
– вектор,
имеющий начало в точке В, а конец в
основании перпендикуляра, опущенного
из В на
(рис. 6.7).
Рис. 6.7. |
В окончательном виде ускорение точки свободного тела выражается следующим образом:
Два последних члена дают ускорение точки В в ее движении вокруг полюса. Таким образом, ускорение точки свободного тела равно |

геометрической сумме ускорения полюса и ускорения этой точки в ее движении вокруг полюса.