

2.5 Дополнительные задания ддя самостоятельных исследований
2.5.1 Определить чувствительности преобразовательных элементов прибора. Вывести их функции преобразования. Оценить нелинейность функций преобразования.
2.5.2 Разделить погрешности преобразовательных элементов прибора.
2.5.3 Учесть влияние случайных погрешностей на суммарную погрешность прибора до и после юстировки, установить закон их распределения.
2.5.4 Произвести юстировку начального положения измерительного
прибора.
2.5.5 Выполнить юстировку параллельности измерительных наконечников.
2.6 Вопросы для контроля знаний
2.6.1 Какие погрешности прибора устраняются юстировкой его чувствительности?
2.6.2 Что такое длина общей нормали, для чего она нормируется?
2.6.3 Из каких преобразовательных элементов состоит измерительная цепь нормалемера?
2.6.4 Расскажите правила проектирования рычажных преобразователей.
2.6.5 Имеет ли индикатор часового типа регулировку чувствительности и почему?
2.6.6 Зачем производится проверка настройки нормалемера на ноль в процессе аттестации?
2.6.7 Что такое погрешность показаний и погрешность измерительного прибора?
2.6.8 Расскажите правила пользования концевыми мерами длины.
2.6.9 Какие дополнительные самостоятельные исследования по повышению точности нормалемера Вы выполнили?
ЛАБОРАТОРНАЯ РАБОТА № 3
ИССЛЕДОВАНИЕ ТОЧНОСТИ НАПРАВЛЯЮЩИХ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ НА ПЛОСКИХ ПРУЖИНАХ
3.1 Задание
3.1.1 Определить влияние неравенства жестких сторон пружинного параллелограмма на погрешность перемещения измерительного стержня.
3.1.2 Определить влияние неравенства упругих сторон пружинного параллелограмма на погрешность перемещения измерительного стержня.
3.2 Приборы и оборудование
3.2.1 Стенд для исследования точности направляющих поступательного
перемещения на плоских пружинах.
3.2.2 Индикатор ИЧ-10 по ГОСТ 577 – 2 шт.
3.2.3 Штангенциркуль ШЦ–II по ГОСТ 166. 3.2.4 Салфетка, спирт, перчатки.
3.3 Основные положения
Направляющие поступательного перемещения на плоских пружинах широко используются в измерительных приборах. Этому способствует более высокая точность таких направляющих, не имеющих зазоров и внешнего трения. Однако погрешности изготовления и сборки плоскопружинных направляющих могут привести к погрешностям поступательного перемещения измерительного стержня.
В направляющих поступательного перемещения (рисунок 3.1) измерительный стержень 1 подвешен на двух плоских пружинах 2 и 4 к неподвижному основанию 3.
Для обеспечения высокой точности перемещения измерительного стержня обязательным является условие равенства жестких сторон А1 и А3 (т.е. длины измерительного стержня между защемлениями плоских пружин и длины основания) и равенства упругих сторон В2 и В4 (т.е. длин незащемлённых частей плоских пружин).
В случае неравенства противолежащих сторон пружинного параллелограмма измерительный стержень при перемещении перекашивается, причем угол перекоса γ изменяется по мере перемещения измерительного стержня (рисунок 3.2). Перекос измерительного стержня является источником погрешности перемещения ∆Y направляющих на плоских пружинах. При соблюдение первого принципа Аббе эта погрешность находится по формуле
∆Y=(М /2)∙γ2 , (3.1)
где М – длина измерительного стержня.
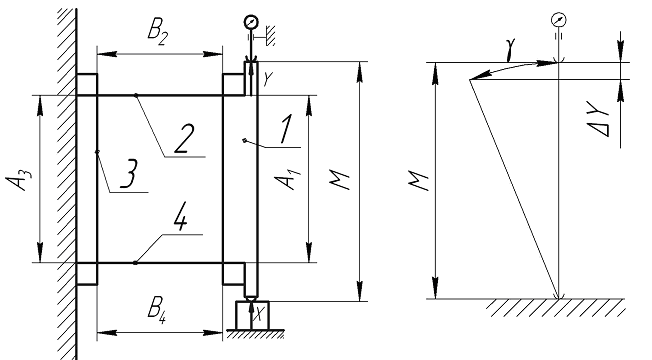
Рисунок 3.1. Схема направляющих поступательного перемещения на плоских пружинах |
Рисунок 3.2. Погрешность перемещения измерительного стержня, вызванная его перекосом |
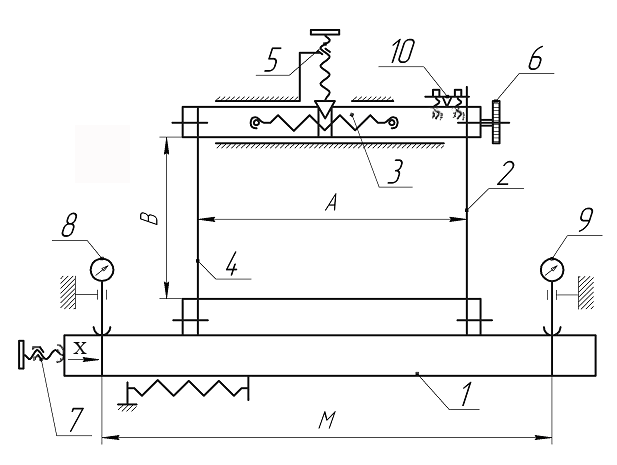
1–измерительный стержень; 2, 4–плоские пружины; 3–основание;
5,6–винты; 7–микровинт микрометра; 8, 9–индикаторы; 10–рычаг
Рисунок 3.3. Схема стенда для исследования точности направляющих на плоских пружинах
В случае неравенства жестких сторон ∆А = А1–А3 направляющих, угол перекоса стержня определяется по формуле
γ = 12 ∙ (∆А /А∙В) ∙ Х (рад), (3.2)
где Х – входной сигнал, или перемещение измерительного стержня из начального положения, соответствующего недеформированным пружинам.
В случае неравенства упругих сторон ∆В = В2–В4 направляющих
γ = 0,6 ∙ (∆В /А∙В2)∙Х2 (рад). (3.3)