7.2. Первичные регуляторы частоты вращения турбин
В начальный период развития энергосистем поддержание частоты на определенном уровне возлагалось на центробежные регуляторы частоты вращения (РЧВ), которыми снабжаются все тепловые и
гидравлические турбины. Эти регуляторы получили наименование первичных ре г у ля то ров. Принцип устройства одного из типов РЧВ показан на рис. 7.2.
Измерительным органом РЧВ является центробежный маятник 1, вращаемый ротором турбины или синхронным электродвигателем, который питается напряжением от специального измерительного ге-
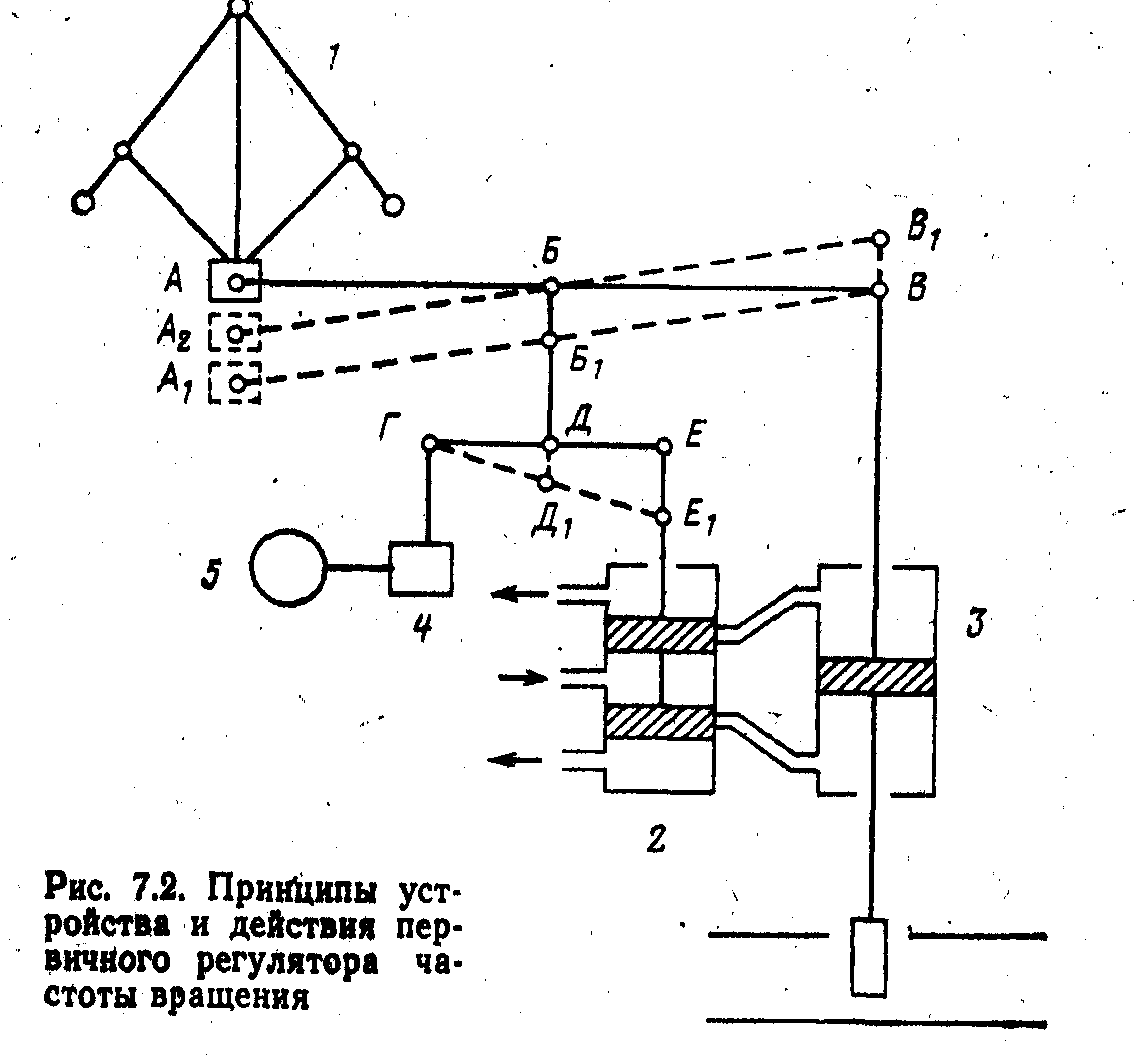
нератора, связанного с валом турбины. При уменьшении частоты вращения и понижении частоты сети шары маятника опускаются и его муфта из положения А перемещается в положение Аи При этом рычаг АВ, поворачиваясь относительно точки В, опускает шарнир В в положение fii и поворачивает рычаг ГЕ относительно точки Г. В результате перемещается вниз поршень золотника 2 и масло под давлением поступает под поршень масляного двигателя 3. Поршень поднимается и увеличивает впуск пара (или воды) в турбину, что приводит к увеличению частоты вращения и перемещению. муфты маятника в положение Л2.
Одновременно рычаг АВ, поворачиваясь относительно точки At, поднимает шарнир Б, а также точки Д и Е рычага ГЕ в прежнее положение, что приводит к закрытию золотника и прекращению процесса регулирования. Новому положению поршня- масляного двигателя 3 и соответственно новому положению муфты в точке А% соответствует меньшая, чем была, частота вращения маятника /, а следовательно, и ротора турбины. Таким образом, рассмотренный РЧВ . компенсирует возросшую нагрузку турбины увеличением впуска па« ра (или воды), но не возвращает частоту вращения турбины к первоначальному значению. Такие РЧВ называются статическими (см. §7.3).
Для восстановления номинального значения частоты вращения в РЧВ, а также для ручного управления турбиной предусмотрен специальный механизм управления турбиной (МУТ) (блок 4 на рис. 7.2), с помощью которого можно изменять положение точки Г. Так, при перемещении точки Г вверх рычаг ГЕ повернется относительно точки Д и опустит поршень золотника 2. При этом масляный двигатель 3 увеличит впуск пара (или веды), частота вращения тур« бины увеличится и муфта маятника вернется в исходное положение А. Механизм управления турбиной имеет дистанционное управление с помощью электродвигателя 5.
Наряду с рассмотренным имеются РЧВ, которые возвращают частоту вращения турбины к первоначальному значению. Такие РЧВ называются астатическими (см. § 7.3).
7.3. Характеристики регулирования
ЧАСТОТЫ ВРАЩЕНИЯ ТУРБИН
И ЭЛЕКТРИЧЕСКОЙ ЧАСТОТЫ СЕТИ
Первичные регуляторы частоты вращения, а также вторичные регуляторы частоты сети (см. ниже) могут иметь характеристики регулирования двух типов: астатическую и статическую (см. гл. 1).
Регулятор, имеющий астатическую характеристику, поддерживает частоту вращения п или частоту сети [ неизменной при изменении нагрузки генератора от холостого хода до номинальной (прямая 2 на рис. 1.3),что является положительным свойством регулирования по астатической характеристике. Недостатком же этого вида регулирования является невозможность параллельной работы нескольких генераторов из-за неопределенности в распределении нагрузки между ними.
Так, если параллельно работают два генератора с астатическими РЧБ и при номинальной частоте они имеют определенную загрузку, то при понижении частоты оба регулятора начнут загружать свои генераторы, стремясь восстановить частоту. При этом они будут загружаться совершенно произвольно, и может даже оказаться, что генератор, регулятор которого оказался более чувствительным, воспримет щю дополнительную нагрузку, а второй не загрузится совсем или начнет загружаться только тогда, когда нагрузка первого генератора достигнет максимальной, а частота еще не восстановится.
Регулятор, имеющий статическую характеристику, поддерживает такую частоту вращения (электрическую частоту), которая по характеристике регулятора со-
ответствует данному значению нагрузки генератора.
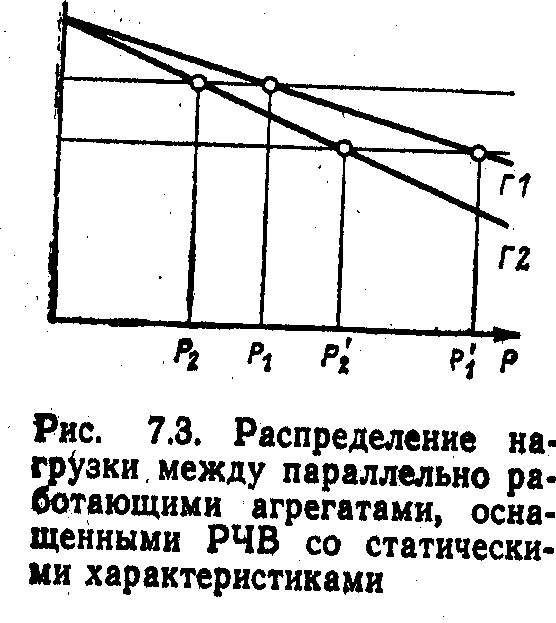
Применение РЧВ со статическими характеристиками в случае параллельной работы нескольких генераторов обеспечивает их устойчивую работу и заданное распределение нагрузки между ними.
Так, если при частоте /i (рис. 7.3) два генератора работали параллельно и по своим характеристикам несли нагрузку Pi и Р2, то при понижении частоты до значения ft каждый генератор загрузится до вполне определенной величины Pj и Pi соответственно. Изменяя наклон характеристик РЧВ, можно обеспечить необходимое долевое участие генераторов в регулировании нагрузки электростанции. Рассмотренная особенность является положительным свойством регулирования по статическим характеристикам. Недостатком же работы по статическим характеристикам является невозможность поддержания неизменной частоты.
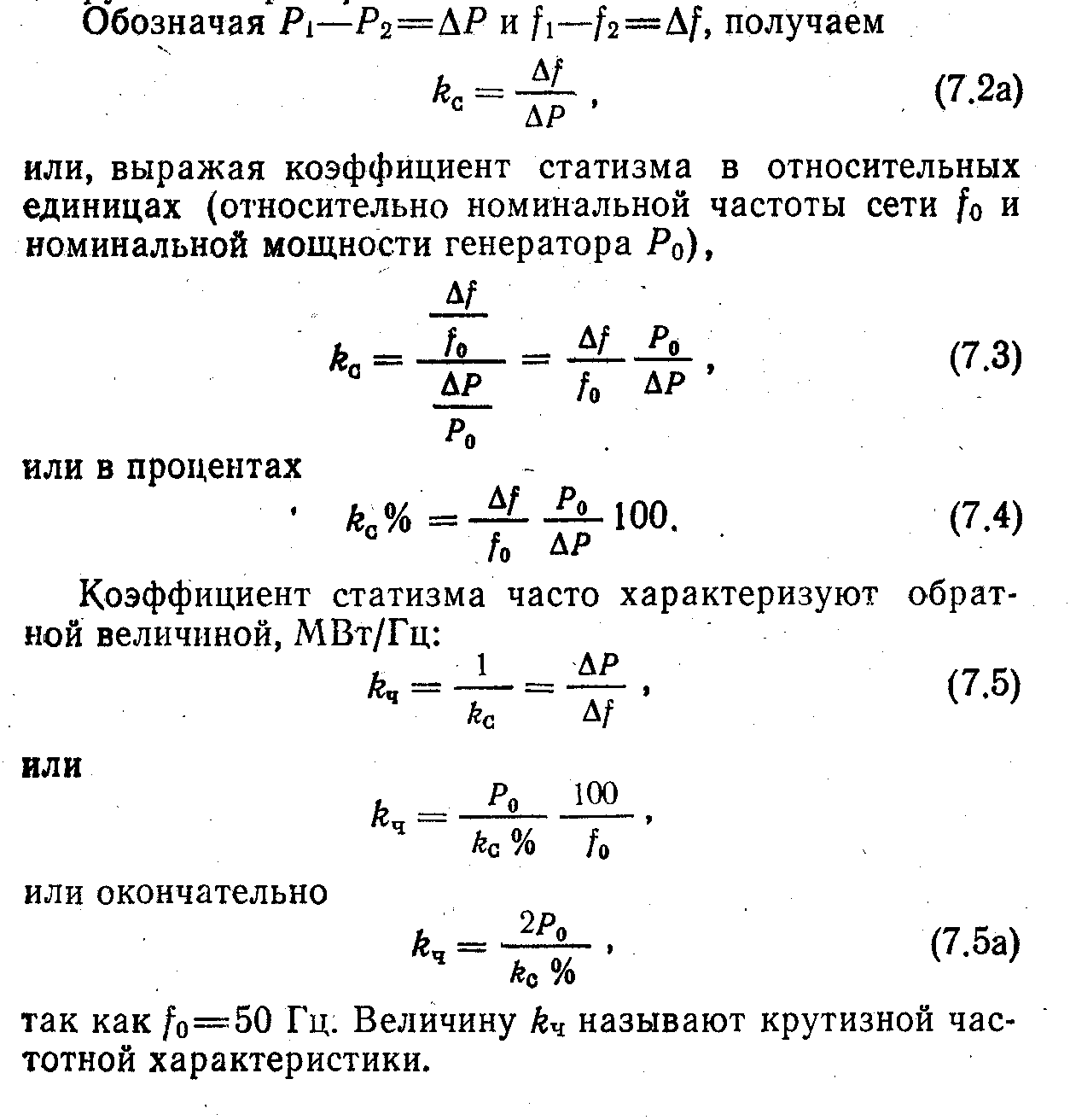
Отклонение частоты сети от номинального значения зависит от коэффициента статизма регулятора, который определяется как отношение изменения частоты сети к изменению нагрузки, Гц/МВт:
![]()
где fi— начальная частота сети; f2— конечная частота сети; Pi—начальная нагрузка генератора; Р2— конечная нагрузка генератора.