

8781
.pdf11
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
n = 1/Т= ω /(2π),
откуда
ω = 2πn.
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
ε = dω . (4.2) dt
Из этой формулы следует, что вектор углового ускорения направлен по оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор ε параллелен вектору ω (рис. 8), при замедленном антипараллелен (рис. 9).
dω |
ω2 |
|
|
|
|
dω |
|
ω1 |
|
|
|
|
||||
> 0 |
|
|
|
|
< 0 |
|
|
|
|
|||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|||||
ω1 |
|
|
|
|
|
ω2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
|
Рис. 8 |
|
|
|
|
|
|
Рис. 9 |
|
|
|
|
|||
|
|
Тангенциальная составляющая ускорения |
|
|
|
|||||||||||
|
|
a |
τ |
= |
dυ |
, υ = ωR и a |
τ |
= |
d(ωR) |
= R |
dω |
= Rε |
||||
|
|
|
|
|
||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
dt |
|
dt |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Нормальная составляющая ускорения |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
a |
n |
= υ2 = ω2 R 2 |
= ω2 R |
||||||
|
|
|
|
|
|
|
|
R |
|
R |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость υ, тангенциальное ускорение aτ нормальное ускорение аn) и угловыми величинами ( угол поворота φ, угловая скорость ω, угловое ускорение ε ) выражается следующими формулами:
s = Rφ, υ = Rω, aτ = Rε, an = ω2R

12
В случае равнопеременного движения точки по окружности (ε = const)
ω = ω0 + εt, |
φ = ω0t + εt2/2, |
где ω0 — начальная угловая скорость.
Краткие выводы
∙Часть физики, которая изучает закономерности механического движения
ипричины, вызывающие или изменяющие это движение, называется механикой. Классическая механика (механика Ньютона-Галилея) изучает законы движения макроскопических тел, скорости которых малы по сравнению со скоростью света в вакууме.
∙Кинематика – раздел механики, предметом изучения которого является движение тел без рассмотрения причин, которыми это движение обусловлено.
∙В механике для описания движения тел в зависимости от условий конкретных задач используются различные физические модели: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело.
∙Движение тел происходит в пространстве и во времени. Поэтому для описания движения материальной точки надо знать, в каких местах пространства эта точка находилась и в какие моменты времени она проходила то или иное положение. Совокупность тела отсчета, связанной
сним системы координат и синхронизированных между собой часов называется системой отсчета.
∙Вектор r = r − r0 , проведенный из начального положения движущейся точки в положение ее в данный момент времени называется вектором перемещения. Линия, описываемая движущейся материальной точкой (телом) относительно выбранной системы отсчета называется траекторией движения. В зависимости от формы траектории различают прямолинейное и криволинейное движение. Длина участка траектории, пройденного материальной точкой за данный промежуток времени, называется длиной пути.
∙Скорость – это векторная физическая величина, которая характеризует быстроту движения и его направление в данный момент времени. Мгновенная скорость определяется первой производной радиусавектора движущейся точки по времени:
v= dr .
dt
Вектор мгновенной скорости направлен по касательной к траектории в сторону движения. Модуль мгновенной скорости материальной точки равен первой производной длины ее пути по времени:

13
v = ds . dt
∙Ускорение – векторная физическая величина для характеристики неравномерного движения. Она определяет быстроту изменения скорости по модулю и направлению. Мгновенное ускорение - векторная величина, равная первой производной скорости по времени:
a = dv . dt
Тангенциальная составляющая ускорения характеризует быстроту изменения скорости по величине (направлена по касательной к траектории движения):
aτ = dv . dt
Нормальная составляющая ускорения характеризует быстроту изменения скорости по направлению (направлена к центру кривизны траектории):
an = v 2 . r
Полное ускорение при криволинейном движении – геометрическая сумма тангенциальной и нормальной составляющих:
|
|
|
|
|
|
|
|
|
|
|
|
dv 2 |
||
|
|
dv |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
2 |
|
|||||
a = |
= aτ + an , a = |
|
||||||||||||
|
|
aτ |
+ an |
= |
|
|
|
|||||||
dt |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
||||
+v2 2 .r
∙Векторная величина, определяемая первой производной угла поворота тела по времени, называется угловой скоростью:
ω= dϕ .
dt
Вектор ω направлен вдоль оси вращения по правилу правого винта.
∙При равномерном вращении время, за которое точка тела совершает один полный оборот, т.е. поворачивается на угол 2π, называется периодом вращения:
T = 2ωπ .
Частота вращения – число полных оборотов, совершаемых телом при равномерном его движении по окружности в единицу времени:
ν = 1 = ω .
T 2π
∙Угловое ускорение – это векторная физическая величина, определяемая первой производной угловой скорости по времени:
ε= dω .
dt

14
При ускоренном вращении тела вокруг неподвижной оси вектор ε сонаправлен вектору ω , при замедленном – противонаправлен ему.
∙Связь между линейными (длина пути s, пройденного точкой по окружности радиуса R, линейная скорость v, тангенциальное ускорение aτ , нормальное ускорение an ) и угловыми характеристиками (угол поворота φ, угловая скорость ω, угловое ускорение ε) выражается следующими формулами:
s = Rϕ , v = ωR, aτ = Rε , an = ω 2 R..
Вопросы для самоконтроля и повторения
1.Что является предметом изучения механики? Какова структура механики?
2.Что такое физическая модель? Какие физические модели использует механика для описания движения материальных объектов?
3.Что представляет собой система отсчета? Что называется вектором перемещения?
4.Какое движение называется поступательным? Вращательным?
5.Что характеризуют скорость и ускорение? Дайте определения средней скорости и среднего ускорения, мгновенной скорости и мгновенного ускорения.
6.Составьте уравнение траектории движения тела, брошенного
горизонтально со скоростью v0 с некоторой высоты. Сопротивление воздуха не учитывать.
7.Что характеризуют тангенциальная и нормальная составляющие ускорения? Каковы их модули?
8.Как можно классифицировать движение в зависимости от тангенциальной и нормальной составляющих ускорения?
9.Что называется угловой скоростью и угловым ускорением? Как определяются их направления?
10.Какими формулами связаны между собой линейные и угловые характеристики движения?
Примеры решения задач
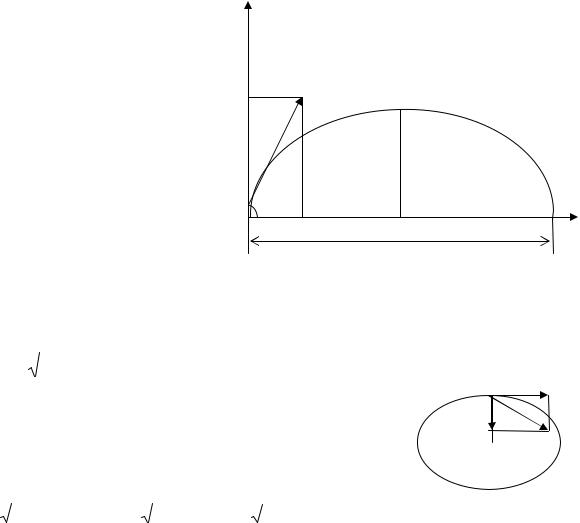
Задача 1. Пренебрегая сопротивлением воздуха, определить угол, под которым тело брошено к горизонту, если максимальная высота подъема тела равна 1/4 дальности его полета (рис. 10).
Дано: h = 1 s .
4
Найти: α .
Решение
Составляющие начальной скорости тела v0 x = v0 cosα , v0 y = v0 sinα;
|
|
|
|
|
|
|
|
15 |
||
h = |
1 |
s, h = v |
|
t − |
gt12 |
, где t |
|
= |
1 |
t - время подъема, t - время полета; |
|
0 y |
|
1 |
|
||||||
4 |
|
2 |
|
2 |
|
|||||
|
|
|
|
|
||||||
v |
|
|
= v |
|
|
− gt , v |
|
= 0 |
|
(в тточк А), откуда t |
= |
v0 sinα |
; |
|
|
|
||||||||||||||||||||||||||||||
y |
0 y |
y |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
g |
|
|
|
|||||||||||
|
|
|
|
|
|
v02 sin 2 α |
|
|
|
|
|
|
|
|
|
|
sin 2 α |
|
|
|
|
sin 2 α |
|
|
|
|
|
|
|
|||||||||||||||||
h = |
− |
g |
|
v02 |
|
= |
v02 |
; |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
2 |
|
|
|
|
|
g 2 |
|
|
|
|
|
|
2g |
|
|
|
|
|
|
|||||||||
s = v |
|
|
|
|
t = 2v |
|
|
t |
= |
2v02 sinα cosα |
; |
|
v02 sin 2 α |
= |
v02 sinα cosα |
, откуда |
|
|||||||||||||||||||||||||||||
0 x |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
0 x 1 |
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
2g |
|
2g |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
sin α = cosα , или tgα = 1. α = arctg1 = 450. |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
Ответ: α = 450. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
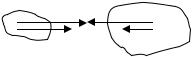
Задача |
|
2. |
|
|
|
|
|
|
|
Тело |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
вращается |
|
|
|
|
|
|
|
|
|
|
вокруг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
неподвижной |
|
|
|
|
оси |
|
|
|
|
по |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
закону, |
|
|
|
|
|
выражаемому |
|
|
|
|
|
|
v0 |
|
|
|
|
|
|
|||||||||||||||||||||||||||
формулой ϕ = 10 + 20t − 2t |
2 |
. |
|
v0y |
|
|
|
|
А |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
Найти |
|
|
|
|
величину |
|
|
|
|
полного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
ускорения |
|
|
|
|
|
|
|
|
|
|
|
точки, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
находящейся на расстоянии |
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|||||||||||||||||||||||||||||||
0,1 м от оси вращения для |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
момента |
|
|
|
времени |
|
|
|
t = 4 |
|
с |
|
o |
|
α |
|
|
|
|
|
x |
||||||||||||||||||||||||||
(рис. 11). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v0x |
|
s |
|
|
|
||||||||||||||
|
|
ϕ = 10 + 20t − 2t 2 ; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
Дано: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
R = 0,1 м; t = 4 с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10 |
|
|
|
|||||||||||||||||
Найти: a. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение |
|
|
|
||||||
a = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
a2 |
+ a |
2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
τ |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аτ |
||||
|
|
|
|
= |
dv |
= Rε , |
|
|
|
|
|
= |
|
v |
2 |
|
= ω 2 R; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
где a |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
τ |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an |
|
||||||||
|
dϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|||||||
ω = |
= 20 − 4t; |
ε = |
= −4 рад/с2=const. |
|
|
|
|
o |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
В момент времени t = 4 с ω = 20 - 4 × 4 = 4 рад/с; |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
a = |
|
|
|
= R |
|
|
|
= 0,1 |
|
= 1,65 |
|
|
|
|||||||||||||||||||||||||||||||||
|
R2ε 2 + ω 4 R2 |
ε 2 |
+ ω 4 |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
16 + 256 |
|
Рис. 11 |
|
||||||||||||||||||||||||||||||||||||||||
м/с2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ответ: а=1,65 м/с2.
16
Глава 2. Динамика материальной точки
§ 5. Первый закон Ньютона. Масса и сила
Как уже указывалось, кинематика изучает движение тел, не рассматривая причин, обусловливающих это движение. Динамика же рассматривает законы движения тел и те причины, которые его вызывают или изменяют. Динамика является основным разделом механики, в ее основе лежат законы Ньютона.
Первый закон Ньютона – всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит изменить ее это состояние.
Свойство тела сохранять состояние покоя или равномерного прямолинейного движения при отсутствии воздействия на него других тел называется инерцией. Поэтому первый закон Ньютона называют также
законом инерции.
Механическое движение относительно, и его характер зависит от системы отсчета. Первый закон Ньютона выполняется не во всякой системе отсчета, а те системы, по отношению к которым он выполняется, называются
инерциальными системами отсчета. Инерциальной системой отсчета является такая, которая либо покоится, либо движется равномерно и прямолинейно относительно какой-то другой инерциальной системы.
С очень высокой степенью точности инерциальной можно считать гелиоцентрическую (звездную) систему отсчета (начало координат находится в центре Солнца, а оси проведены в направлении определенных звезд). Система отсчета, связанная с Землей, строго говоря, неинерциальна, однако эффекты, обусловленные ее неинерциальностью (Земля вращается вокруг собственной оси и вокруг Солнца), пренебрежимо малы, поэтому при решении многих задач ее можно считать инерциальной.
Из опыта известно, что при одинаковых воздействиях различные тела неодинаково изменяют скорость своего движения, т.е., иными словами, приобретают различные ускорения. Ускорение зависит не только от величины воздействия, но и от свойств самого тела (от его массы).
Масса тела — физическая величина, являющаяся одной из основных характеристик материи, определяющая ее инерционные (инертная масса) и гравитационные (гравитационная масса) свойства. С помощью точных экспериментов установлено, что инертная и гравитационная массы пропорциональны друг другу. Выбирая единицы таким образом, чтобы коэффициент пропорциональности стал равным единице, получим, что инертная и гравитационная массы равны друг другу. Поэтому в дальнейшем будем говорить просто о массе тела.
Чтобы описывать воздействия, упоминаемые в первом законе Ньютона, вводят понятие силы. Под действием сил тела либо изменяют скорость движения, т. е. приобретают ускорения (динамическое проявление сил), либо деформируются, т. е. изменяют свою форму и размеры (статическое проявление сил). В каждый момент времени сила характеризуется числовым значением,
17
направлением в пространстве и точкой приложения. Итак, сила — это векторная величина, являющаяся мерой механического воздействия на тело со стороны других тел или полей, в результате которого тело получает ускорение или изменяет свою форму и размеры.
§ 6. Второй закон Ньютона
Второй закон Ньютона — основной закон динамики поступательного движения — отвечает на вопрос, как изменяется механическое движение материальной точки (тела) под действием приложенных к ней сил.
Если рассмотреть действие различных сил на одно и то же тело, то оказывается, что ускорение всегда прямо пропорционально равнодействующей приложенных сил:
a ~ F |
(m = const) |
(6.1) |
При действии одной и той же силы на различные тела их ускорения оказываются различными. Чем больше масса тела, тем больше его инертность и тем меньшее ускорение под действием данной силы оно приобретает, т. е.
a ~ 1/m |
(F = const) |
(6.2) |
Используя выражения (6.1) и (6.2) и учитывая, что сила и ускорение — величины векторные, можем записать
a = kF/m |
(6.3) |
Соотношение (6.3) выражает второй закон Ньютона - ускорение, приобретаемое материальной точкой (телом), совпадает по направлению с действующей на нее силой и равно отношению этой силы к массе материальной точки.
Второй закон Ньютона справедлив только в инерциальных системах отсчета. Первый закон Ньютона является частным случаем второго. Действительно, в случае равенства нулю равнодействующей всех сил (при отсутствии воздействия на тело со стороны других тел) ускорение (см. (6.3)) также будет равно нулю.
Всистеме СИ коэффициент пропорциональности k = 1. Тогда
а= F/m,
или
F = ma = m |
dv |
(6.4) |
|
dt |
|||
|
|
Учитывая, что масса тела (материальной точки) в классической механике есть величина постоянная, в выражении (6.4) ее можно внести под знак производной:
18 |
|
||
F = |
d |
(mv) |
(6.5) |
|
|||
|
dt |
|
|
Векторная величина
p=mv, |
(6.6) |
численно равная произведению массы материальной точки на ее скорость и имеющая направление скорости, называется количеством движения (импульсом) этой материальной точки.
Подставляя (6.6) в (6.5), получим
F = |
dp |
(6.7) |
|
dt |
|||
|
|
Выражение (6.7) более общая формулировка второго закона Ньютона – производная количества движения материальной точки по времени равна действующей на нее силе.
Из (6.4) следует определение: за единицу силы принимают силу, которая единице массы сообщает ускорение, равное единице. Единица силы — ньютон (Н): 1 Н — сила, которая массе в 1 кг сообщает ускорение 1 м/с2 в направлении действия силы:1 Н = 1 кг · м/с2.
§ 7. Третий закон Ньютона
Характер взаимодействий между материальными точками (телами) определяется третьим законом Ньютона: всякое действие материальных точек (тел) друг; на друга носит характер взаимодействия; силы, с которыми действуют друг на друга материальные точки, всегда равны по модулю, противоположно направлены и действуют вдоль прямой, соединяющей эти точки:
F1 = - F2 |
(7.1) |
Рассмотрим, например, два разноименных заряженных тела массами m1 и
|
|
m2, которые притягивают друг друга (рис. 12). |
||||
|
|
Под действием сил F1 и F2 тела приобретают |
||||
F1 |
F2 |
ускорения а1 и |
а2. |
Согласно |
второму |
закону |
Ньютона, можно записать: |
|
|
||||
|
|
|
|
|||
a1 |
|
a2 |
|
|
|
|
Рис. 12 |
F1 = m1a1 |
и |
F2 = m2a2 |
(7.2) |
||
|
|
|
|
|
||
|
|
Используя |
выражения |
(7.1) и |
(7.2), |
|
получим
19
m1a1 = - m2a2,
или |
a1 = - m2a2/m1, |
т. е. ускорения двух взаимодействующих тел обратно пропорциональны их массам и направлены в противоположные стороны.
§ 8. Силы трения
Рассматривая до сих пор силы, мы не интересовались их происхождением. Однако в механических процессах действуют различные силы: трения, упругости, тяготения. Рассмотрим силы трения. Из опыта известно, что всякое тело, движущееся по горизонтальной поверхности другого тела, при отсутствии действия на него других сил с течением времени замедляет свое движение и в конце концов останавливается. С механической точки зрения, это можно объяснить существованием некоторой силы, которая препятствует движению. Это сила трения — сила сопротивления, направленная противоположно относительному перемещению данного тела и приложенная по касательной к соприкасающимся поверхностям.
Различают внешнее (сухое) и внутреннее (жидкое, или вязкое) трение.
Внешним трением называется трение, возникающее в плоскости касания двух соприкасающихся тел при их относительном перемещении. Если соприкасающиеся тела неподвижны друг относительно друга, говорят о трении покоя, если же происходит относительное перемещение этих тел, то в зависимости от характера их относительного движения говорят о трении
скольжения, качения или верчения.
Внутренним трением называется трение между частями одного и того же тела, например, между различными слоями жидкости или газа, скорости которых меняются от слоя к слою. В отличие от внешнего трения здесь отсутствует трение покоя. Если тела скользят относительно друг друга и разделены прослойкой вязкой жидкости (смазки), то трение происходит в слое смазки. В таком случае говорят о гидродинамиском трении (слой смазки достаточно толстый) и граничном трении (толщина смазочной прослойки ≈ 0,1 мкм и меньше).
Рассмотрим некоторые закономерности внешнего трения. Это трение обусловлено
Fтр |
|
F |
шероховатостью |
|
соприкасающихся |
||||
|
|
|
|
||||||
|
|
|
поверхностей, в случае же очень гладких |
||||||
|
|
|
поверхностей |
трение обусловлено силами |
|||||
|
|
|
|||||||
|
|
|
межмолекулярного притяжения. |
|
|||||
|
mg |
|
|
Рассмотрим лежащее на плоскости тело |
|||||
|
|
(рис. |
13), |
к |
которому |
приложена |
|||
|
|
|
горизонтальная |
|
сила F. Тело придет в |
||||
|
Рис. 13 |
|
движение |
лишь |
тогда, |
когда |
приложенная |
||
|
|
|
сила |
F |
будет |
больше |
силы |
трения Fтр. |
|

|
|
|
|
20 |
|
|
|
Французские физики Г. Амонтон |
и |
Ш. Кулон опытным путем |
|||||
установили следующий закон: сила Fтр трения скольжения пропорциональна |
|||||||
силе N нормального давления: |
|
|
|
|
|
||
|
|
|
|
|
Fтр = μN, |
|
|
|
N |
Fтр |
|
|
|
||
|
|
|
|
|
|
||
|
|
где |
μ — |
коэффициент трения скольжения, |
|||
|
|
||||||
|
|
|
|||||
|
F |
зависящий |
от свойств |
соприкасающихся |
|||
|
поверхностей. |
|
|
||||
|
|
α |
|
|
|||
|
|
|
Найдем значение |
коэффициента трения. |
|||
|
α |
Если тело находится на наклонной плоскости с |
|||||
|
|
mg |
углом наклона α (рис. 14), то оно приходит в |
||||
|
Рис. 14 |
движение |
только |
когда |
тангенциальная |
||
|
составляющая F силы тяжести mg будет больше |
||||||
|
|
|
|||||
силы трения Fтр . Следовательно, в предельном случае (начало скольжения тела)
F = Fтр
или
mg sinα= μN = μmg cosα
откуда
μ = tgα
Таким образом, коэффициент трения равен тангенсу угла α, при котором начинается скольжение тела по наклонной плоскости. коэффициент трения скольжения.
Трение играет большую роль в природе и технике. Благодаря трению движется транспорт, удерживается забитый в стену гвоздь и т. д. В некоторых случаях силы трения оказывают вредное действие и поэтому их надо уменьшать. Для этого на трущиеся поверхности наносят смазку (сила трения уменьшается примерно в 10 раз), которая заполняет неровности между трущимися поверхностями и располагается тонким слоем между ними так, что поверхности как бы перестают касаться друг друга, а скользят относительно друг друга отдельные слои жидкости. Таким образом, внешнее трение твердых тел заменяется значительно меньшим внутренним трением жидкости.
Довольно радикальным способом уменьшения силы трения является замена трения скольжения трением качения (шариковые и роликовые подшипники и т. д.). Коэффициент трения качения в десятки раз меньше коэффициента трения скольжения.