

6822
.pdf
|
|
|
|
70 |
|
² ²› ∑¨QC> |
³¬¨ ∑¨QC> ³´¨ |
||
где T ─ |
начальное, а T0 |
─ конечное значение кинетической энергии . |
||
Для неизменяемых систем |
µ∑¨QC> |
³´¨ 0 ¶ можно записать: |
||
|
² ²› ∑¨QC> |
³¬¨ |
|
|
При поступательном движении тела кинетическая энергия равна: |
||||
² 5C |
•'†5 |
|
|
|
При вращении тела относительно некоторой оси z его кинетическая энергия рав-
на: ² C5 ·ml5.
При плоскопараллельное движение тела кинетическая энергия равна:
²пл C5 •'†5 C5 ·m†l5,
где '† скорость центра массы тела, а ·m† момент инерции тела относительно оси, проходящей через центр массы тела перпендикулярно оси вращения.
Работа силы на конечном перемещении определяется как криволинейный инте-
|
(2) |
(2) |
грал второго рода от элементарной работы: |
A12(F) = ∫ |
δA = ∫ (F·dr). |
|
(1) |
(1) |
Работа постоянной силы на прямолинейном перемещении равна произведению модуля силы на модуль перемещения и на косинус угла между направлением силы и перемещением: А12 (F ) = F cos α × S.
|
|
|
F |
||
M1 |
M |
|
M2 |
||
α |
|||||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.7
При этом: A (F) > 0, если 0 < α < π/2, A (F) = 0, если α = π/2,
A (F) < 0, если π/2 < α < π.

71
Моментом инерции материальной точки относительно некоторой оси (осевым моментом инерции) называется величина, равная произведению массы точки на квадрат ее расстояния до этой оси: J z = m h2 .
Моменты инерции некоторых однородных тел:
1.Тонкий прямолинейный однородный стержень массой М и длиной l:
Jz= (Ml2)/12.
2.Тонкая прямоугольная пластинка массой M и размерами a × b:
Jx = (M/12)(a2 + b2).
3.Тонкое однородное кольцо массой M и радиусом R: Jс = MR2 .
4.Тонкая круглая пластинка (однородный диск) массой M и радиусом R:
Jс = MR2/2 .
При решении задач приходится вычислять моменты инерции тел относительно осей вращения, которые не проходят через центр масс.В этом случае применяют
теорему Гюйгенса – Штайнера:
Момент инерции механической системы (тела) относительно некоторой оси равен сумме момента инерции относительно параллельной ей оси, проходящей через центр масс, и величины равной произведению массы системы на квадрат расстояния между осями: J z = J zC + md 2
Задача 3.9. Кинетическая энергия
Ступенчатое колесо радиуса t, масса которого m равномерно распределена по окружности радиуса , катится по прямолинейному горизонтальному рельсу без проскальзывания, касаясь рельса ободом радиуса t 2 , имея в точке С скорость '̅. Чему равна кинетическая энергия тела?
R |
|
R |
|
C |
v |
C |
v |
r |
|
r |
|
|
|
ω |
|
|
|
P |
|
|
|
Рис.3.8 |
|
Решение:
72
Так как колесо совершает плоскопараллельное движение, то его кинетическая
энергия вычисляется по формуле: |
1 |
1 |
|
|
² |
||
|
2 |
•'†5 2 ·†l5, |
|
гдеl ─ угловая скорость колеса, |
|
'† ' ─ скорость центра масс, |
|
·† ─ момент инерции колеса относительно оси, проходящей через центр масс |
|||
(точку С), который равен: |
·† • 5. |
|
|
Учитывая, что колесо катится без проскальзывания и, следовательно, точка Р яв- |
|
ляется для него мгновенным центром скоростей, то l '†⁄¹º '⁄t. |
|
Подставляя все в формулу кинетической энергии, получим: |
|
² 5C •'5 5C • 5 ¥.*// 5C •'5 »C •'5 »¼ •'5 . |
|
Ответ: ² »¼ •'5. |
|
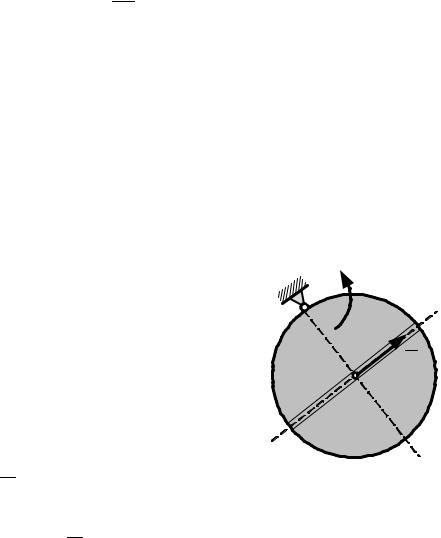
Задача 3.10. Кинетическая энергия |
|
Диск радиуса t и массой |
•, которая равномерно распределена по тонкому |
стержню, проходящему через центр С, вращается относительно оси, проходящей через точку О, лежащую на ободе, перпендикулярно плоскости диска, имея в т. С скорость '.
Определить кинетическую энергию вращающегося диска. |
||||
Решение: |
|
|
ω |
|
Кинетическая энергия тела, вращающегося во- |
||||
|
||||
круг оси равна: |
|
O |
||
|
² 5C ·½l5 |
v |
||
где ·½ - момент инерции тела относительно оси |
C |
|||
вращения. |
|
|
|
|
Момент инерции стержня относительно оси, |
|
|||
проходящей через центр масс (точку С в данном |
|
|||
случае) равен: |
·† C5C |
•95, |
|
|
где 9 - длина стержня. |
|
Рис.3.9 |
||
Поскольку |
9 2t и |
·† C5C •95, то по теореме Гюйгенса-Штайнера можно |
||
определить момент инерции относительно оси вращения, проходящей через точку
О: ·½ ·† • ∙ ¾¹5 C‹ •t5 •t5 ¥‹ •t5.

73
Зная эту величину, можно определить кинетическую энергия диска:
² C5 ∙ ¥‹ •t5 ∙ l5 5‹ •t5l5.
При вращательном движении угловая скорость находится по формуле l '⁄¾¹ '⁄t.
Тогда кинетическую энергию диска можно выразить через его массу и скорость |
||||||
точки С: ² 5 •t5l5 |
5 |
•t5 |
}. |
~5 |
5 |
•'5. |
‹ |
‹ |
|
{ |
|
‹ |
|
Ответ: ² ‹5 •'5. |
|
|
|
|
|
|
Задача 3.11. Кинетическая энергия В планетарном механизме с внешним зацеплением водило ОА, вращающееся во-
круг неподвижной оси О с угловой скоростью l, приводит в движение зубчатое колесо массой •, катящееся по неподвижному колесу 2. Если колесо 1 – однородный диск, то чему равна его кинетическая энергия?
|
ω |
|
|
v A |
R2 |
R2 |
ω |
ω1 |
|
|
R1 |
|
|
R1 |
O |
A |
O |
P |
A |
|
1 |
|
|
1 |
|
2 |
|
|
2 |
|
Рис.3.10 |
|
|
|
Решение: |
|
|
|
|
Колесо 1 совершает плоскопараллельное движение и его кинетическая энергия |
|
равна: |
² 5C •'А5 5C ·АlC5, |
Так как колесо 2 неподвижно, то точка Р является мгновенным центром скоро-
стей колеса 1. |
'„ l"tC t5$. |
Таким образом, |
В этом случае угловую скорость колеса 1 можно определить по формуле: lC '„⁄³º l"tC t5$⁄tC.
Подставляя все в формулу кинетической энергии, получим:
C |
•l5"tC t5$5 |
|
C |
• tC5 |
y/"{zY{/$/ |
‹ |
•l5"tC t5 |
$5. |
² 5 |
¥ |
{/ |
¥ |
|||||
Ответ: ² ¥‹ •l5"tC t5 |
$5. |
z |
|
|
|
|||
|
|
|
|
|||||

74
Задача 3.12. Теорема об изменении кинетической энергии Система состоит из тел 1, 2 и 3, связанных между собой посредством нерастяжи-
мых нитей. Проскальзывание нерастяжимых нитей отсутствует, силой трения пренебрегаем. Блок 2 состоит из двух ступеней разных радиусов t 1.5 , массы всех тел одинаковы и равны • 3 кг, угол ¿ 30›. Движение начинается из положения покоя и при перемещении груза на величину À "м$ система имеет кинетическую
энергию ² 1.8® }кг∙м/~.
с/
Найти величину перемещения À.
Решение:
Применим теорему об изменении кинетической энергии системы:
²C ²› ∑>¨QC ³¬¨ ∑>¨QC ³´¨
|
|
|
|
|
Y O |
|
а |
б |
|
|
|
|
|
|
|
|
|
|
|
|
r |
R |
|
|
|
O |
R |
|
|
|
|
|||
|
|
N |
|
r |
|
|
3 |
|
|
|
X O |
||
|
|
|
|
|||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
α |
α |
|
P1′ |
P 2 |
|
|
1 |
|
|
|
|
||
h |
|
|
1 |
|
h |
|
|
|
|
|
|
 P1
P1
Рис.3.11
Начальная кинетическая энергия равна нулю, то есть ²› 0, так как в начальный момент времени система неподвижна. Сумма работ внутренних сил равна нулю, так
как |
тела, образующие систему, абсолютно твердые, а нити – нерастяжимые |
|
∑¨QC> |
³´¨ 0. |
²C ∑¨QC> ³¬¨. |
Следовательно: |
||
Вычислим работу внешних сил.
К внешним силам относятся: силы тяжести: ºC, º′C, º5, реакция плоскости -, ре-
акции шарнира О: ½, ý.
³µ-¶ ³µÂ½¶ ³µÃ½¶ ³µº5¶ 0,

75
³µºC¶ ºC ∙ À •®À 3®À, |
|
|
|
|
||
³ }º′C~ º′C ∙ À ∙ t ∙ :Ä6 30› •®À ∙ t ∙ :Ä6 30› •®À ∙ |
3 |
∙ |
1 |
2.25®À. |
||
Составим уравнение ²C ∑¨QC> ³¬¨: |
2 |
|
2 |
|
||
1.8® 3®À 2.25®À, |
1.8® 0.75®À, |
|
|
|
|
|
Откуда получаем, что À |
C.Ȯ |
2.4"м$. |
|
|
|
|
›.Ç¼Æ |
|
|
|
|
||
Ответ: À = 2.4 м. |
|
|
|
|
|
|
3.5 Принцип возможных перемещений
Для того чтобы механическая система находилась в равновесии, необходимо и достаточно, чтобы возможная работа всех активных сил на любых возможных пе-
ремещениях была равна нулю: |
ȳ 0 |
или |
∑¨QC «¨È !¨ 0 |
. |
|
|
> |
! |
|||
Возможными перемещениями точки называются воображаемые бесконечно малые перемещения точки системы, допускаемые в каждый момент времени наложенными на нее связями.
Правила определения работы силы и момента показаны на рисунке 3.12.
δ A = +M δϕ |
|
|
δ A = +M δϕ |
|
δ A = −M δϕ |
δ A = −M δϕ |
|||
|
|
М |
δϕ |
|
δϕ |
|
|
М |
|
|
М |
М |
|
|
|
|
|||
δ A = +F δ v |
|
|
|
|
F |
F |
|
δ A = −F δ v |
|
|
|
|
|
|
|||||
δ v |
|
δ v |
|
δ v |
|
|
|||
|
|
|
|
δ v |
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
F |
F |
|
δ A = −F δ v |
δ A = +F δ v |
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.3.12
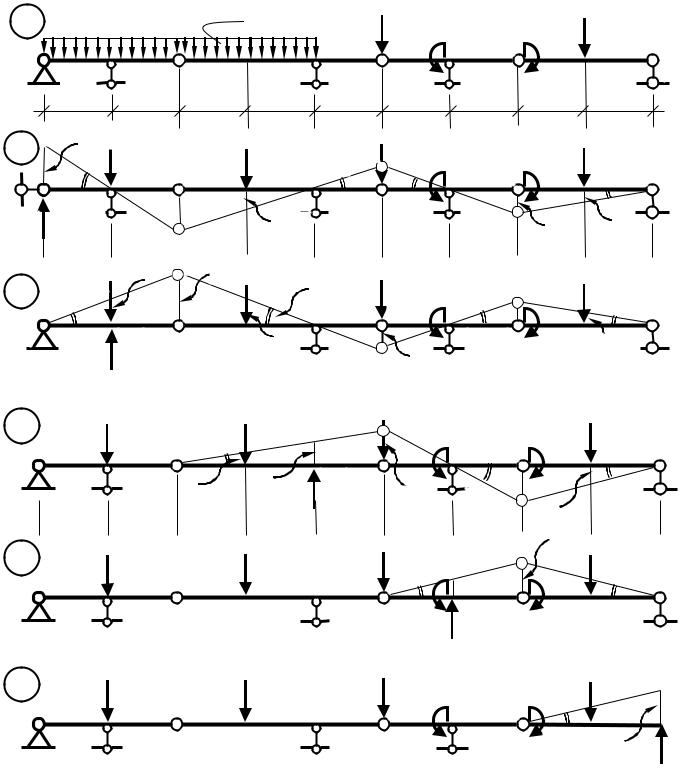
Задача 3.13. Принцип возможных перемещений Определить реакции опор балки(рис.3.13,а).
Решение:
Заданная составная балка образована из четырех элементарных балок, соединенных шарнирами F, G и H, и загружена системой параллельных сил.
76
Распределенную нагрузку, приложенную к каждой из элементарных балок, заменяем равнодействующими Q1 и Q2 соответственно.
1. Для определения вертикальной составляющей в неподвижной опоре A отбросим вертикальную линейную связь, заменив ее искомой реакций YA = RA , сообщим точке A возможное перемещение δsA = AA´и построим соответствующую моду бал-
ки (рис. 3.13, б).
Уравнение для определения RА:
RА δsА + Q2δsQ2 – P 1δsG – M 1δφD – M 2δφE + P2δsP2 = 0.
Выразим все возможные – линейные и угловые перемещения точек системы через
δφE:
δsP2 = a δφE;
δφD = 2 δφE, поскольку δsH = a δφD = 2a δφE; δsG = δsH = 2a δφE;
δsQ2 = δsG = 2a δφE;
δsА = δsF = 2δsQ2 = 4a δφE.
Получаем:
(4RА + 2Q2 – 2P 1 – 2M 1/а – M 2/а + P2 ) a δφE = 0,
откуда
RА = (1/4)( – 2Q 2 + 2P1 + 2M1/а + M2/а –P 2 ) = (1/4)(– 2P + 2P + 2P + P – P) = P/2 .
77
a |
q= P/2a |
P1= P |
M1= Pa |
M2= Pa |
P2= P |
|
|
|
|
G |
H |
|
A |
B |
F |
|
C |
|
|
|
D |
|
|
|
E |
|
|
|
|
|
|
|
|
|
|||||
|
a |
a |
a |
a |
a |
|
a |
|
a |
|
a |
a |
|
A´ |
|
δsA |
|
|
|
|
|
|
|
|
|
P2= P |
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q1= P |
|
|
|
G´ |
P1= P |
|
|
|
|
|
|
|
|
|
|
Q2= P |
|
M1= Pa |
|
M2= Pa |
|
|
||||
|
|
|
|
δφC |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
δφE |
E |
|
|
|
B |
F |
|
|
|
|
|
|
H |
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
A |
δφB |
δsF |
|
C |
G |
δφD |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RA |
|
|
|
δsQ2 |
|
|
|
|
|
|
δsH |
|
|
|
|
|
|
|
|
|
|
|
|
|
δsP2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F´ |
|
|
|
|
|
|
|
|
|
|
|
|
δsB |
F´ |
δsF |
|
|
|
|
|
|
|
P2= P |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q1= P |
|
|
δφC |
|
P1= P |
|
|
H´ |
|
|
|||
в |
|
|
|
Q2= P |
|
M1= Pa |
|
|
|
|
|||
|
|
|
|
|
|
|
δφE |
|
|||||
|
|
B´ |
F |
|
|
|
G |
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
B |
|
|
C |
|
|
D |
δφD |
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
||||
|
|
|
δsQ2 |
|
|
|
|
δsP2 |
|
||||
|
δφA |
|
|
|
|
|
|
M2= Pa |
|
||||
|
|
RB |
|
|
|
G´ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
δsG |
|
|
|
|
|
|
|
|
|
|
|
|
|
G´ |
|
|
|
|
|
|
г |
|
Q1= P |
|
Q2= P |
C´ |
|
P1= P |
|
|
|
|
P2= P |
|
|
|
|
|
M1= Pa |
|
M2= Pa |
|
||||||
|
|
|
δφF |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
D |
H |
|
|
|
|
A |
B |
F |
|
C |
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
||||
|
δsC |
|
|
|
|
|
|
|
|
|
|||
|
|
|
δsQ2 |
|
|
δsG |
|
|
|
|
δφE |
|
|
|
|
|
|
RС |
|
|
δφD |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
δsP2 |
|
|
|
|
|
|
|
|
|
|
|
|
H´ |
δsH |
|
|
|
|
Q1= P |
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
Q2= P |
|
|
P1= P |
D´ |
|
|
P2= P |
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
G |
|
δsD |
|
|
|
|
A |
B |
F |
C |
δφG |
D
RD |
|
E |
|
H |
δφE |
|
M2= Pa |
||
|
е
Q1= P
A |
B |
Q2= P
F |
C |
P1= P |
M1= Pa |
|
G |
H |
D
M2= Pa
δφH |
E´
P2= P
E
δsE
RE
Рис.3.13
2. Для определения RB отбрасываем подвижную опору в точке В, заменяя ее неизвестной реакцией, сообщаем этой точке возможное перемещение δsB= BB´и строим соответствующую моду балки (Рис. 3.13, в).
Уравнение ПВП для определения RB:
78
(RB – Q 1) δsB – Q 2 δsQ2 + P1 δsG + M1 δφD + M2 δφE – P 2 δsP = 0.
Выражаем все возможные – линейные и угловые перемещения точек системы через δφE:
δsP2 = a δφE;
δφD = 2 δφE, поскольку δsH = a δφD = 2a δφE; δsG = δsH = 2a δφE;
δsQ2 = δsG = 2a δφE;
δsB = (1/2)δsF = δsQ2 = 2a δφE.
Получаем: (2RB – 2Q 1 – 2Q 2 + 2P1 + 2M1/а + M2/а – P 2 ) a δφE = 0,
откуда
RB =(1/2)(2Q1 2Q2 –2P 1 –2M 1/а –M 2/а +P2)=(1/2)(2P +2P –2P –2P –P +P)= 0 .
3. Чтобы найти RС отбрасываем подвижную опору С, заменяя ее неизвестной реакцией, сообщаем этой точке возможное перемещение δsС= CC´и строим соответствующую моду балки (рис. 3.13, г).
Соответствующее уравнение ПВП примет вид:
– Q 2 δsQ2 + RС δsС – P 1 δsG – M 1 δφD – M 2 δφE + P2 δsP = 0.
Выражаем все возможные – линейные и угловые перемещения точек системы через δφF:
δsQ2 = a δφF; δsС = 2a δφF; δsG = 3a δφF;
δφD = 3 δφF, поскольку δsG= a δφD = 3a δφF;
δφE = (1/2)δφD = (3/2) δφF, поскольку δsH = a δφD = 2a δφE; δsP = a δφE = (3/2)aδφF.
Получаем: [–Q 2 + 2RС – 3P 1 –(3/a)M 1 –(3/2a)M 2 +(3/2) P2] a δφF=0, откуда RС=(1/2)(Q2+3P1+(3/a)M1+(3/2a)M2–(3/2)P 2)=
=(1/2[P+3P+3P+(3/2)P–(3/2)P]=(7/2)P .
4. Для определения RD отбрасываем подвижную опору в точке D, заменяя ее неизвестной реакцией, сообщаем этой точке возможное перемещение δsD = DD´и строим соответствующую моду балки (рис. 3.13, д).
Уравнение ПВП для определения RD:
RD δsD + M1 δφG + M2 δφE – P 2 δsP2 = 0.
Выражаем все возможные – линейные и угловые перемещения точек системы че-
рез δφE: δsD = δsP2 = aδφE ;
δφG = δφE , поскольку δsH = 2a δφD = 2a δφE. Получаем: (RD + M1/a + M2/a – P 2) aδφE = 0,

79
откуда RD = – M 1/a – M 2/a + P2 = –2P + P = – P .
5. Для определения RE отбрасываем подвижную опору в точке E , заменяя ее неизвестной реакцией, сообщаем этой точке возможное перемещение δsE = EE´и строим соответствующую моду балки (рис. 3.13, e).
Уравнение ПВП для определения RE:
– P 2 δsP2 – M 2 δφH + REδsE = 0.
Подставляя сюда δsP2 = aδφH и δsE = 2aδφH , получим:( – P 2a – M 2 + 2REa ) δφH = 0,
откуда RE = (1/2)( P + P) = P.
6. Проверяем правильность решения задачи, составляя уравнение:
ΣYi = RА + RB + RС + RD +RE – Q 1 – Q 2 – P 1 – P 2 =
= P/2 + 0 + (7/2)P – P + P – P – P – P – P = 0 .
Проверка выполняется.
Ответ: RА = P/2, RB = 0, RС = (7/2)P, RD = – P, R E = P.
Задача 3.13. Принцип возможных перемещений Определить реакции в жесткой заделке А балки (рис. 3.14, а).
a |
|
D |
|
M1= Pa |
E |
M2= 2Pa |
2P |
C |
|
|
|
|
|
|
|||
|
A |
|
|
B |
|
|
|
|
|
a |
|
a |
a |
|
a |
|
a |
б |
δφА |
D´ |
|
M1= Pa |
|
M2= 2Pa |
2P |
δφС |
MA |
D |
|
δφВ |
E |
C |
|||
|
|
|
|
|
||||
|
A |
|
|
B |
|
|
|
δsP |
|
A´ |
|
|
|
|
E´ |
|
|
|
|
|
|
|
|
|
||
|
D´ |
δsD |
M1= Pa |
|
|
|
|
|
в |
δsA |
|
M2= 2Pa |
|
δφС |
|||
|
|
|
|
|
|
2P |
||
|
|
|
|
δφВ |
E |
C |
||
|
|
|
|
|
|
|||
|
A |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RA |
|
|
Рис. 3.14 |
E´ |
|
δsP |
|
|
|
|
|
|
||||
Решение:
Жесткая заделка A эквивалентна трем связям: двум линейным и одной моментной, реакции которых равны XA ,YA и MA соответственно.