

6822
.pdf50
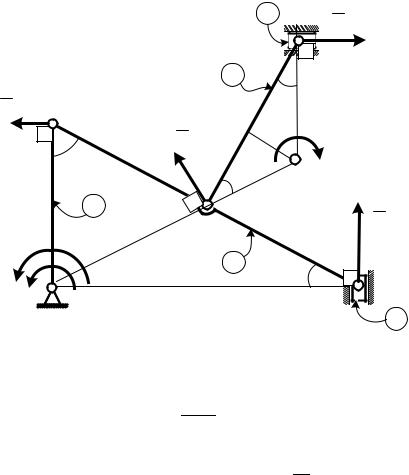
В некоторый момент времени, движущийся плоский механизм находится в по-
ложении, показанном на рисунке. Кривошип ОА вращается с угловой скоростью
€ радс .
Даны размеры элементов механизма: OA = 50 см, АВ = 80см, R=40 см, r=20 см. Определить угловую скорость звена AВ и колеса В, а также скорости точек A,
В и С.
ω1
 O A
O A
Рис.2.15
C |
R |
r |
B |
Решение:
1. Механизм состоит из трех тел: звеньев ОА и AВ и колеса В. Пронумеруем их и рассмотрим их движение.
ω1
O |
v A |
|
ω2 |
|
v C |
|
C = P2 |
|
|
|
||
A |
|
|
R |
|
|
|
|
|
|
|
r |
|
v B |
|
B |
|
|
ω3 |
|
|
|
|
|
|
|
|
P3 |
Рис.2.16
2. Звено 1 (элемент ОА). Движение вращательное.
Центр скоростей находится в неподвижной точке О, то есть ” . Угловая скорость задано, то есть € € радс .
Определяем скорость точки А.
Скорость L(! направлена в сторону вращения перпендикулярно отрезку ОА. Ее модуль определяется по формуле Эйлера: L € ∙ |”| ∙ смс .
3. Звено 2 (элемент ОD). Движение плоскопараллельное.

51
Заметим, что ‚ , следовательно, U .
Линия действия скорости точки B направлена горизонтально (параллельно плос-
кости, по которой катится колесо В). Восстанавливая перпендикуляры к направле- |
||||||||||
нию скоростей вектора L(! |
и L(!‚, получаем МЦС звена 2 (точку P2). Направление |
|||||||||
скорости L(! показывает, что вращение звена 2 относительно точки P2 направлено |
||||||||||
против часовой стрелки, следовательно, скорость L(!‚ направлена влево. Угловая |
||||||||||
скорость звена 2 определяем с помощью формулы Эйлера: |
|
|
||||||||
L € ∙ | |, где |
‚ ‚ |
√ . см. |
|
|||||||
Получаем, что € |
L |
. . радс . |
|
|
||||||
| | |
|
|
||||||||
Также по формуле Эйлера определяем скорость точки В: |
|
|
||||||||
L‚ € ∙ |‚ | . ∙ . |
смс . |
|
|
|||||||
4. Элемент 3 (колесо В). Движение плоскопараллельное. |
|
|
||||||||
Мгновенным центром скоростей колеса является точка P3 ( точка соприкоснове- |
||||||||||
ния колеса и поверхности). Направление скорости L(!‚ показывает, что угловая ско- |
||||||||||
рость € направлена против часовой стрелки, а ее величина определяется с помо- |
||||||||||
щью формулы Эйлера: L‚ € |
∙ |‚ |. |
|
|
|
|
|||||
Отсюда получаем, что |
€ |
|
L‚ |
LD‚ . . радс . |
|
|||||
|‚ | |
|
|||||||||
По формуле Эйлера определяем скорость точки С: |
|
|
||||||||
L’ € ∙ | ’| € ∙ " |
D$ . ∙ . смс . |
|
||||||||
Скорость направлена в сторону вращения перпендикулярно к отрезку ’. |
L’ |
|||||||||
Ответ: € . радс , |
€ . радс , |
|
L смс , |
L‚ . смс , |
||||||
. смс . |
|
|
|
|
|
|
|
|
|
|
Задача 2.14. Плоскопараллельное движение твердого тела В некоторый момент времени движущийся плоский механизм находится в поло-
жении, показанном на рисунке. Кривошип ОА в данный момент времени имеет угловую скорость € радс . Длины звеньев равны: ОА = АС = СВ = СD = 50 см.
Определить угловую скорость звеньев AB и CD, а также скорости точек A, B, C
и D.

52
D
|
30° |
|
|
A |
|
|
60° |
|
ω |
C |
|
B |
||
|
||
|
30° |
|
|
O |
Рис.2.17
Решение:
1.Механизм состоит из пяти тел: звеньев ОА, AB, CD и ползунов В и D. Пронумеруем их и рассмотрим их движение.
2.Звено 1 (элемент ОА). Движение вращательное.
Центр скоростей находится в неподвижной точке О, то есть P1=0. Угловая скорость задана, то есть € € радс .
Определяем скорость точки А.
Скорость (!L направлена в сторону вращения перпендикулярно отрезку ОА. Ее модуль определяется по формуле Эйлера: L € ∙ |” | ∙ смс .
3. Звено 2 (элемент АB).
Направление скорости точки В определяется направляющими ползуна. Движение ползуна В поступательное. Вектор L(!‚ имеет вертикальное направле-
ние. Восстанавливая перпендикуляры к направлению скоростей вектора L(! и L(!‚, получаем МЦС звена 2 (точку P2). Она совпадает с точкой О. Направление угловой скорости звена 2 определяется вектором скорости L (против часовой стрелки относительно точки О). Следовательно скорость ползуна В направлена вверх.
53
D |
v D |
|
90° |
v A |
|
A |
30° |
|
ω 4 |
||
|
|
E |
|
|
90° |
v C |
|
|
60° |
|
|
|
|
|
|
|
|
30° |
P4 |
|
|
90° |
|
|
|
v B |
|
|
|
C |
|
ω1 |
|
|
90° |
ω 2 |
|
30° |
B |
|
O = P = P |
||
|
|
||
|
1 |
2 |
|
Рис.2.18
Угловая скорость звена 2 определяется с помощью формулы Эйлера: L € ∙ | |. Получаем, что € | L | радс .
Также по формуле Эйлера определяем скорость точки В:
L‚ € ∙ |‚ | € ∙ | ‚| ∙ MNF ∙ ∙ √ смс .
Скорость точки С направлена по перпендикуляру к отрезку СР2 в сторону вращения звена 2 относительно точки Р2 (рис. 2.18). Поскольку треугольник АСО равносторонний, то СР2=ОА=50см.
Тогда LС € ∙ |С | ∙ смс . 4. Звено 3 (элемент ОB).
Направление скорости точки D определяется направляющими ползуна. Движение ползуна D поступательное. Вектор L(!˜ имеет горизонтальное направ-
ление.
Восстанавливая перпендикуляры к направлению скоростей вектора L(!’ и L(!˜, получаем МЦС звена 4 (точку P4). Поскольку треугольник CDP4 равнобедренный, то
CP4 = DP4. Отсюда следует, что скорости точек C и D по модулю равны: L˜ L’ смс .
Направление угловой скорости звена 4 определяется вектором скорости L’ (по часовой стрелке относительно точки P4 ). Следовательно, скорость ползуна D направлена вправо.
Угловая скорость звена 4 определяется с помощью формулы Эйлера:
54
LС € ∙ |С |, |
|
где ’ |
’š |
|
|
|
MNF |
√ ⁄ |
|||||
Получаем, что € |
LС |
. . радс . |
||||
|С | |
||||||
Ответ: € радс , |
€ . радс , L L’ |
|||||
. . см.
L˜ смс , L‚ смс .
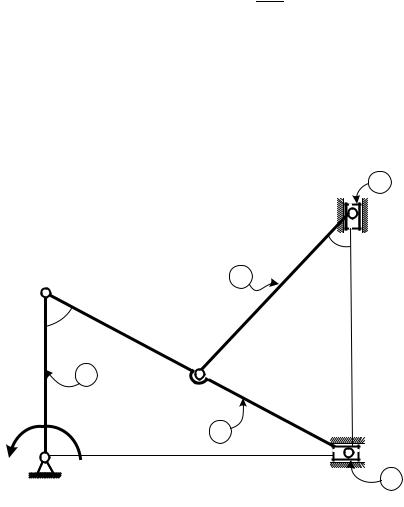
Задача 2.15. Плоскопараллельное движение твердого тела В некоторый момент времени движущийся плоский механизм находится в поло-
жении, показанном на рисунке.
D
A |
45° |
ω |
C |
|
B |
||
|
O
Рис.2.19
Кривошип ОА в данный момент времени имеет угловую скорость € радс .
Длины звеньев равны: ОА = АС = СВ = 50 см.
Определить угловую скорость звеньев AB и CD и скорости точек A, B, C и D.
Решение:
1.Механизм состоит из пяти тел: звеньев ОА, AB, CD и ползунов В и D. Пронумеруем их и рассмотрим их движение
2.Звено 1 (элемент ОА). Движение вращательное.
Центр скоростей находится в неподвижной точке О, то есть P1=0. Угловая скорость задана, то есть € € радс .
Определяем скорость точки А.
Скорость (!L направлена в сторону вращения перпендикулярно отрезку ОА. Ее модуль определяется по формуле Эйлера: L € ∙ |”| ∙ смс .
3. Звено 2 (элемент АB).

55
Направление скорости точки В определяется направляющими ползуна. Движение ползуна В поступательное. Вектор L(!‚ имеет горизонтальное направление и параллелен вектору L . Отсюда следует, МЦС звена 2 находится в бесконечности, а
движение звена 2 является мгновенно поступательным. Все точки звена 2 имеют одинаковые скорости и (!L (!L‚ (!L’
|
|
ω4 |
90° |
5 |
|
|
|
||
|
|
P4 |
45° |
D |
|
|
|
|
|
v A |
A |
4 |
|
v D |
|
|
|||
|
90° |
45° |
|
|
|
90° |
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
1 |
|
30° |
|
|
v C |
C |
|
|
ω1 |
|
|
||
|
2 |
|
B |
|
|
|
30° |
||
|
|
|
|
|
|
O = P |
|
v B |
3 |
|
1 |
|
||
|
Рис.2.20 |
|
|
|
4. Звено 4 (элемент CD). |
|
|
|
|
|
|
|
Направление скорости точки D определяется направляющими ползуна. Движение |
|||||||
ползуна D поступательное. Вектор L(!˜ |
имеет вертикальное направление. |
Восста- |
|||||
навливая перпендикуляры к направлению скоростей вектора L(!’ и L(!˜, |
получаем |
||||||
МЦС звена 4 (точку P4). Легко заметить, что фигура CEDP4 представляет собой |
|||||||
квадрат со стороной, |
равной ’š ’‚ ∙ MNF ∙ |
√ |
√ . см. Сле- |
||||
|
|||||||
довательно, CP4 = DP4=43.3 см. |
|
|
|
|
|
|
|
Направление угловой скорости звена 4 определяется вектором скорости L’ (по |
|||||||
часовой стрелке относительно точки P4). Следовательно скорость ползуна В |
|||||||
направлена вверх. |
|
|
|
|
|
|
|
Угловая скорость звена 4 определяется с помощью формулы Эйлера: |
|
||||||
LС € ∙ |’ |. Получаем, что € |
L’ |
. . радс . |
|
||||
|’ | |
|
||||||
Также по формуле Эйлера определяем скорость точки В: |
|
||||||
Так как CP4 = DP4, то скорости точек C и D равны: L˜ L’ € ∙ |’ | € ∙ |
|||||||
|˜ | смс . |
|
|
|
|
|
|
|
Ответ: € радс , |
€ . радс , |
L L‚ L’ L˜ смс . |
|
||||

56
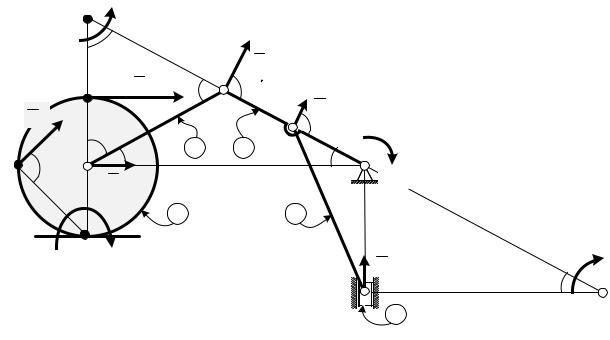
Задача 2.16. Плоскопараллельное движение твердого тела В некоторый момент времени движущийся плоский механизм находится в поло-
жении, показанном на рисунке. Кривошип ОА вращается с угловой скоростью € радс . Длина звена ОА = AD = 50 см. Размер a = 25см. Радиус колеса R = 20 см.
Определить угловые скорости звеньев AD , ВС и колеса D, скорость ползуна С, а также скорости точек A, D, Е и F.
Решение:
1.Механизм состоит из пяти тел: звеньев ОА, BC, AD и ползуна C и колеса D. Пронумеруем их и рассмотрим их движение.
2.Звено 1 (элемент ОА). Движение вращательное.
Центр скоростей находится в неподвижной точке О, то есть P1=0. Угловая скорость задана, то есть € € радс .
Определяем скорость точки А.
|
2a |
a |
|
|
|
|
|
|
|
|
E |
|
a |
|
|
|
|
|
|
|
|
A |
|
|
|
|
B |
O |
ϕ1 |
F |
30° |
30° |
||
|
D |
|
|
ω1 |
|
R |
|
|
|
|
|
|
|
2a |
C |
Рис.2.21
Скорость (!L направлена в сторону вращения перпендикулярно отрезку ОА. Ее модуль определяется по формуле Эйлера: L € ∙ |”| ∙ см.
Скорость (!L‚ также направлена в сторону вращения перпендикулярно отрезкус ОА. Ее модуль равен: L‚ € ∙ |”‚| ∙ смс .
57
|
P4 |
ω 4 |
|
|
|
|
|
|
|
60° |
|
v A |
|
|
|
|
|
v E |
|
|
|
|
|
|
E |
60° |
90° |
v B |
|
|
|
|
v F |
|
A |
|
|
ω1 |
|
|
60° |
|
B |
90° |
|
||
|
|
|
|
|
|
||
F |
D |
30° |
|
|
30° |
|
|
|
90° |
v D |
|
|
|
|
O = P |
|
|
|
|
|
1 |
||
|
P5 |
ω5 |
|
|
|
|
ω 2 |
|
|
|
|
|
v C |
||
|
|
|
|
|
|
|
30° |
|
|
|
|
|
|
C |
P2 |
|
|
|
|
|
|
|
Рис.2.22
3. Звено 2 (элемент BC).
Направление скорости точки C определяется направляющими ползуна. Движение ползуна C поступательное. Вектор L(!’ имеет вертикальное направле-
ние. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Восстанавливая перпендикуляры к направлению скоростей вектора L(!’ и L(!‚, по- |
|||||||||||||
лучаем МЦС звена 2 (точку P2). |
|
|
|
|
|
||||||||
Направление угловой скорости звена 2 определяется вектором скорости L‚ (по |
|||||||||||||
часовой стрелке относительно точки P2). Следовательно скорость ползуна С |
|||||||||||||
направлена вверх. |
|
|
|
|
|
||||||||
Угловая скорость звена 2 определяется с помощью формулы Эйлера: |
|||||||||||||
L‚ € ∙ |
|‚ |. |
|
|
|
|
|
|||||||
Найдем длину отрезка BP2. |
|
’” |
FGH |
. |
|
|
|
|
|||||
” |
|||||||||||||
Следовательно, ” ∙ ’” см. |
|||||||||||||
И тогда ‚ ‚” ” см. |
|||||||||||||
Получаем, что € |
L‚ |
|
|
. радс . |
|
|
|
|
|
||||
|‚ | |
|
|
√ |
|
√ |
|
|||||||
Поскольку |
”’ MNF |
√ |
, то |
’ ” ∙ |
∙ |
∙ √ |
|||||||
|
|
|
|||||||||||
. см. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда скорость ползуна C найдем по формуле Эйлера:
L’ € ∙ |’ | . ∙ . . смс . 4. Звено 4 (элемент AD).
58
Движение звена 4 плоскопараллельное. |
Вектор L(!˜ имеет горизонтальное |
|
направление (определяется движением центра колеса). |
|
|
Восстанавливая перпендикуляры к направлению скоростей вектора L(! и L(!˜, по- |
||
лучаем МЦС звена 4 (точку P4). Поскольку треугольник ADP4 равнобедренный, то |
||
AP4 = DP4. Отсюда следует, что скорости точек A и D по модулю равны: |
L˜ |
|
L смс . |
|
|
Направление угловой скорости звена 4 определяется вектором скорости L’ (по |
||
часовой стрелке относительно точки P4 ). |
Следовательно, скорость ползуна D |
|
направлена вправо.
Угловая скорость звена 4 определяется с помощью формулы Эйлера: |
|||||||||
L € ∙ | |, откуда получаем, что |
€ |
L |
|
. радс . |
|||||
| | |
|||||||||
5. Звено 5 (колесо D). |
|
|
|
|
|
||||
Движение колеса 5 плоскопараллельное. Мгновенный центр скоростей P5 нахо- |
|||||||||
дится в месте соприкосновения колеса с рельсом. |
|
||||||||
Направление угловой скорости колеса € определяется направлением вектора L˜. |
|||||||||
Модуль угловой скорости определяется из формулы Эйлера: |
|
||||||||
€ |
L˜ |
. радс . |
|
|
|
|
|||
|˜ | |
|
|
|
|
|||||
Направления скоростей точек E и F, которые соответственно перпендикулярны к |
|||||||||
отрезкам P5E и P5F, определяются направлением угловой скорости € . |
|||||||||
Модули этих скоростей определяются по формуле Эйлера: |
|
||||||||
Lš |
€ |
∙ |š | |
. ∙ . . смс , |
|
|||||
L |
€ |
∙ | | . ∙ ∙ √ . смс . |
L L˜ смс , |
||||||
Ответ: € |
. радс , |
€ . радс , |
€ . радс , |
||||||
L’ . смс |
, L‚ . смс , Lš . смс , L . смс . |
||||||||
59
ГЛАВА 3. ДИНАМИКА
3.1 Динамика материальной точки
Задачи, решаемые методами динамики, условно можно разделить на две группы: Первая задача динамики (прямая) предполагает, что закон движения механической системы известен, а силы которые вызывают это движение необходимо найти. Если закон движения задан в векторной форме, выражение для вектора силы мо-
|
2 R |
R |
|
|
d r |
||
гут быть найдены путем дифференцирования радиус-вектора по формуле: m |
= F , |
||
dt 2 |
|||
|
|
Если закон движения задан в аналитической форме, проекции силы на декартовые оси могут быть найдены путем дифференцирования координат по формулам:
mx&& = Fx
my&& = F
ymz&& = Fz
Если закон движения задан в естественной форме, проекции силы на естественные оси могут быть найдены путем дифференцирования по формулам:
m |
dvτ |
= F |
|||
|
|
||||
|
dt |
τ |
|||
|
|
||||
|
v2 |
= Fn |
|||
m |
|
|
|||
ρ |
|||||
|
|
||||
|
0 = F |
||||
|
|
|
b |
||
|
|
|
|||
|
|
|
|
||
Вторая задача динамики (обратная) предполагает, что известны силы, действующие на механическую систему, а найти необходимо закон движения. Ее решение сводится к интегрированию дифференциальных уравнений движения материальной точки в векторной, координатной или естественной форме.
Задача 3.1. Первая задача динамики
Найти силу, под действием которой точка с массой m движется по закону: x = acos(ωt), y = bsin (ωt).
Решение.
Дифференцируя уравнения закона движения, получим:
&x& = −aω2 cosωt, &y& = −bω2 sin ωt.