

3. Теорема о моменте равнодействующей (теорема Вариньона)
Момент равнодействующей плоской системы сил относительно произвольно взятой точки равен алгебраической сумме моментов составляющих сил относительно той же точки (для 2)F ГЛ = 0; Мгл = 0; система приводится к одной равнодействующей, равной главному вектору системы).
Мо(FΣ)= Σ Мо (Fі)
(если система сил, приложенных к твердому телу имеет равнодействующую, то момент равнодействующей относительно любой точки тела равен сумме моментов всех сил относительно этой точки).
4 . Уравнения равновесия плоской системы сил
FГЛ = 0;
Мгл= ΣMo(Fi) = 0.
Итак, для равновесия системы сил, произвольно расположенных в плоскости, необходимо и достаточно, чтобы главный вектор и главный момент этих сил относительно любого центра каждый в отдельности равнялся нулю.
Модуль главного вектора можно определить через проекции на координатные оси всех сил системы.
FГЛ = (ΣFіх)2+(ΣFіу)2 =0 из этого следуют уравнения равновесия:
 Σ
Fіх=0
Σ
Fіх=0
Σ Fіу=0
Σ Мо (Fі)=0
Другие формы уравнений равновесия:
Σ МА (Fі)=0
Σ МВ (Fі)=0 (АВС не лежат на одной прямой)
Σ МС (Fі)=0
Σ МА (Fі)=0
Σ МВ (Fі)=0 (ось х не перпендикулярна прямой АВ)
Σ Fіх=0
Д ля
системы параллельных сил выбрав одну
из осей проекций, параллельной этим
силам (ось у), а другую перпендикулярной
к ним (ось х), получим два уравнения
равновесия:
ля
системы параллельных сил выбрав одну
из осей проекций, параллельной этим
силам (ось у), а другую перпендикулярной
к ним (ось х), получим два уравнения
равновесия:
Σ Fіу=0
Σ Мо (Fі)=0
 Σ
МА
(Fі)=0
Σ
МА
(Fі)=0
Σ МВ (Fі)=0
Алгоритм решения задач
1.Выделяем обьект равновесия(тело или точку): будем рассматривать равновесие относительно...
2. Показываем на рисунке все действующие силы, включая реакции связей.
3. Выбираем систему координат – оси координат желательно направлять пралельно или перпендикулярно к искомым милам.
4. Составляем уравнения равновесия объекта исследования.
Σ Fіх=0
Σ Fіу=0
Σ Мо (Fі)=0
5. Из полученных уравнений определяем неизвесные величины (определяем реакции).
6 .
Проверяем правильность решения уравнений.
.
Проверяем правильность решения уравнений.
Σ Мр(Fі)=0
Σ Ме(Fі)=0
5. Опорные устройства балочных систем
Очень часто в машинах и конструкциях встречаются тела удлиненной формы, называемые балками (или балочными системами). Балки в основном предназначены для восприятия поперечных нагрузок. Балки имеют специальные опорные устройства для сопряжения их с другими элементами и передачи на них усилий. Применяются следующие виды опор.
Шарнирно-подвижная опора (рис. 5, а). Эта опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. В этой опоре известны точка приложения опорной реакции — центр шарнира и ее направление — перпендикуляр к опорной плоскости. Здесь остается неизвестным числовое значение опорной реакции RA. Условное изображение опоры показано на рис. 5, а. Следует отметить, что опорная поверхность шарнирно-подвижной опоры может быть не параллельна оси балки (рис. 5, б).
Реакция RA в этом случае не будет перпендикулярна оси балки, так как она перпендикулярна опорной поверхности.
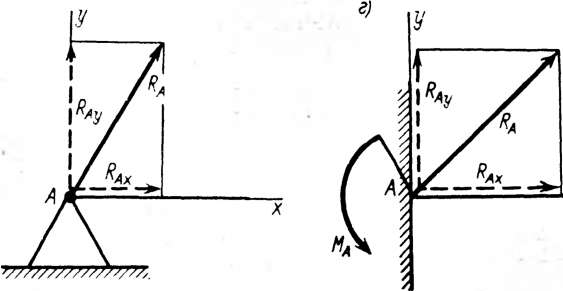
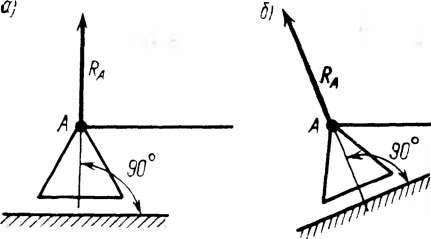
Рис. 5
Шарнирно-неподвижная форма (рис. 5, в). Эта опора допускает поворот вокруг оси шарнира, но не допускает никаких линейных перемещений. В данном случае известна только точка приложения опорной реакции — центр шарнира; направление и значение опорной реакции неизвестны. Обычно вместо определения значения и направления (полной) реакции RA находят ее составляющие RAx и RAy.
Жесткая заделка (защемление) (рис. 5, г). Такая опора не допускает ни линейных перемещений, ни поворота. Неизвестными в данном случае являются не только значение и направление реакции, но и точка ее приложения. Поэтому жесткую заделку заменяют силой реакции RA и парой сил с моментом МА. Для определения опорной реакции следует найти три неизвестных: составляющие RAx и RAy опорной реакции по осям координат и реактивный момент МА.