

11.3 Задачи анализа и синтеза аср при случайных воздействиях. Расчет дисперсии ошибки, параметрический синтез аср по минимуму дисперсии Задачи анализа и синтеза аср при случайных воздействиях
Так как устойчивость линейных систем является свойством системы и не зависит от характера воздействия, то устойчивость при случайных воздействиях определяется также, как и для детерминированных.
Качество систем при детерминированных воздействиях оценивается с помощью показателей качества, таких как tp, , T и т.д. При случайных воздействиях они теряют смысл, так как входные и выходные величины являются случайными функциями времени и при исследовании рассматривают не сами процессы, а их статистические свойства, т.е. определяют не мгновенные значения процессов, а их средние значения.
При случайных воздействиях ошибка системы (t) = x(t)-y(t) также является случайной величиной, при этом используют ее усредненное значение – среднюю квадратичную ошибку
 (11.3.1)
(11.3.1)
Эта ошибка используется для оценки точности или качества систем при случайных воздействиях.
Недостатки средней квадратичной ошибки:
1.Она обеспечивает минимум не мгновенного, а среднего значения, при этом мгновенное значение может быть недопустимо большим.
2. Она недооценивает малые ошибки и придает чрезмерное значение большим ошибкам, так как ее значение возводится в квадрат.
Синтез оптимальных передаточных функций САУ при случайных воздействиях
Если на входе системы помимо управляющего есть и возмущающее воздействие (помеха), то ошибка такой системы состоит из двух составляющих. Часто оказывается, что стремление уменьшить одну составляющую приводит к увеличению второй и наоборот. Задача синтеза и состоит в том, чтобы обеспечить минимально возможную сумму обеих составляющих.
Возможны несколько способов решения задачи синтеза. Первый и наиболее простой применим, если уже известна структура системы. В этом случае необходимо, используя выше приведенные выражения определить СКО как функцию варьируемых параметров системы и обычным методом определить их значения, дающие минимум ошибки. Еще один способ применим когда полезный сигнал имеет более низкочастотный спектр, чем помеха (рис.11.3.1).
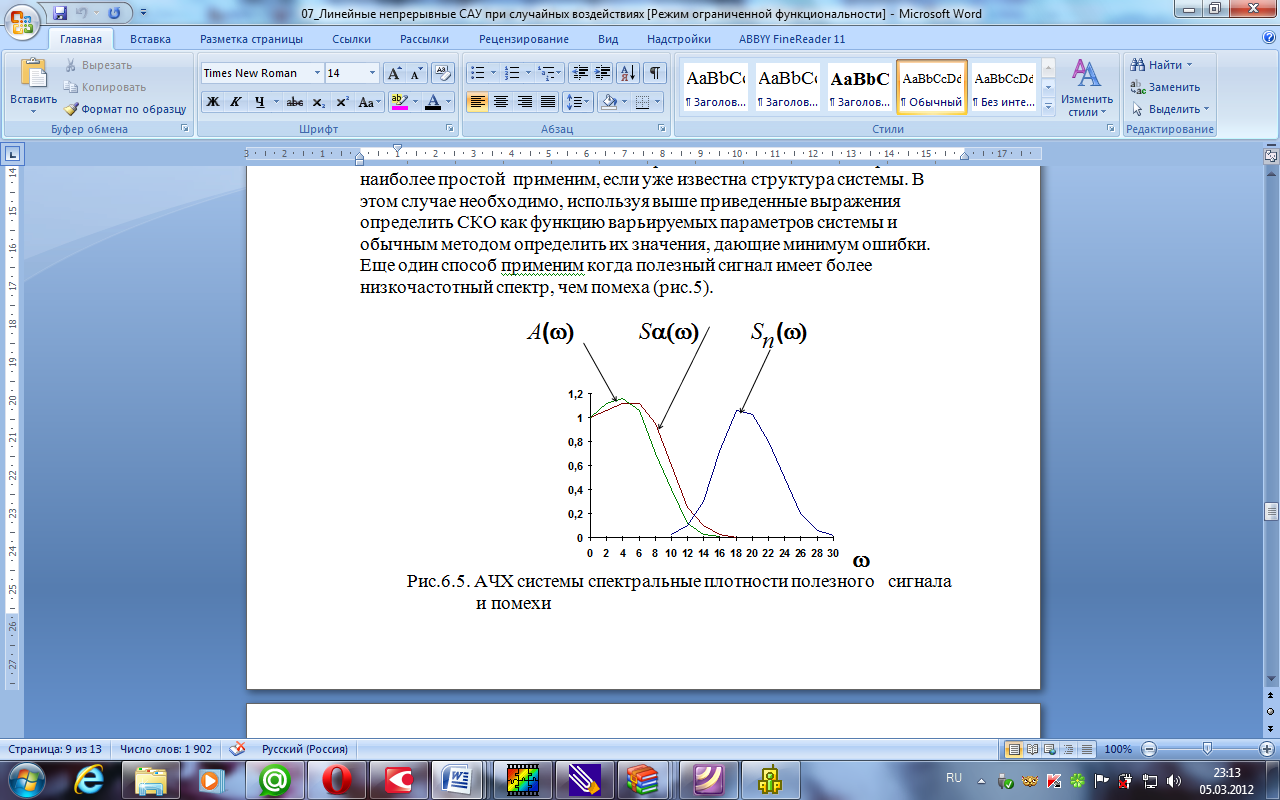
Рис.11.3.1. АЧХ системы спектральные плотности полезного сигнала и помехи
В этом случае полоса пропускания системы должна быть выбрана достаточно широкой для обеспечения необходимой точности воспроизведения полезного сигнала, но такой ширины, чтобы полностью отфильтровать помехи.
В наиболее общем случае, когда спектры полезного сигнала и помехи накладываются друг на друга систему строят так, чтобы ее частотная характеристика максимально приближалась к спектральной характеристике полезного сигнала.
Рассмотрим методику определения оптимальной передаточной функции по критерию минимума СКО, когда структура системы неизвестна, а известна только передаточная функция неизменяемой части.
При
определении оптимальной частотной
характеристики замкнутой САУ
 по критерию минимума СКО между идеальным
сигналом
по критерию минимума СКО между идеальным
сигналом
 и оптимальным сигналом
и оптимальным сигналом
 ,
предположим, что:
,
предположим, что:
1)
идеальная частотная характеристика
 или идеальная функция веса
или идеальная функция веса
 известны;
известны;
2)
полезный сигнал
 и помеха
и помеха
 являются стационарными эргодическими
случайными процессами с нулевым
математическим ожиданием и их
корреляционные функции и спектральные
плотности известны;
являются стационарными эргодическими
случайными процессами с нулевым
математическим ожиданием и их
корреляционные функции и спектральные
плотности известны;
3) на время переходного процесса ограничения не накладываются, т.е. решение ищется в классе систем с “ бесконечной памятью”.
Схема постановки задачи приведена на рисунке 11.3.2.
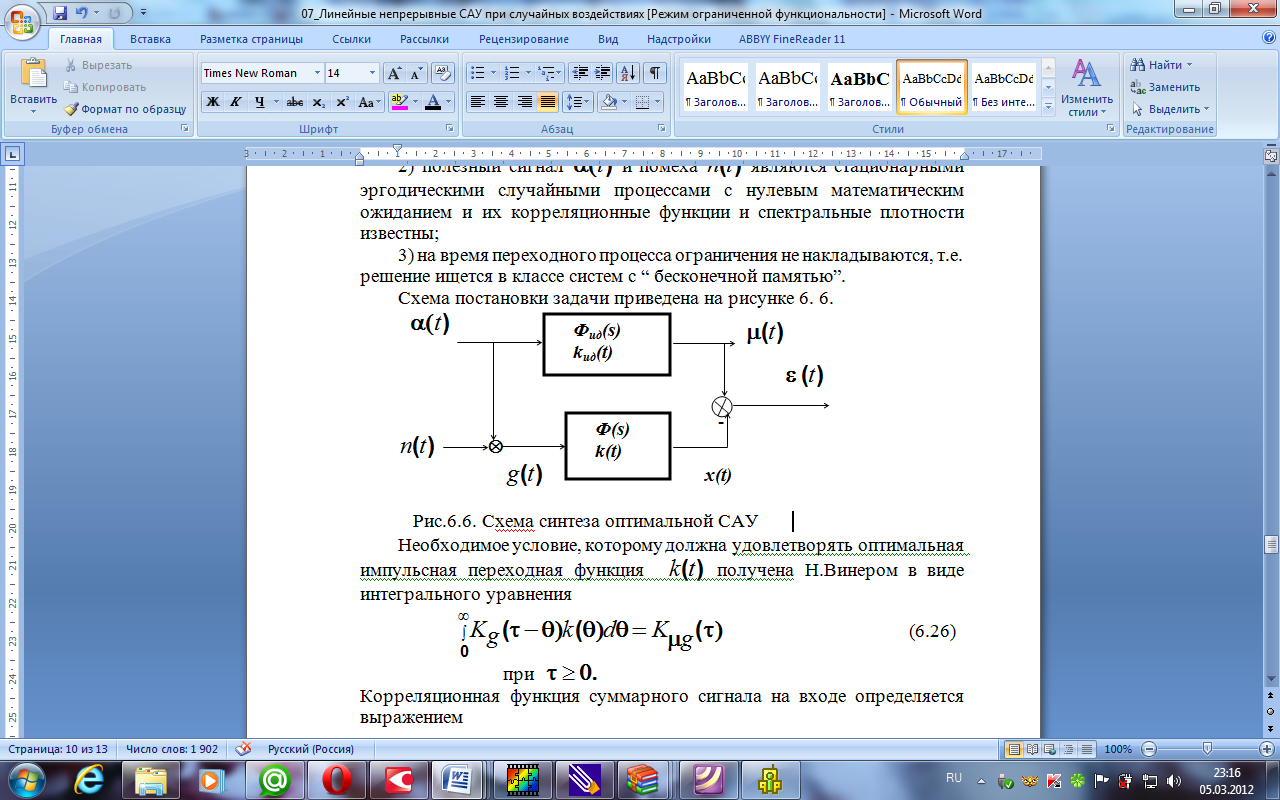
Рис.11.3.2. Cхема синтеза оптимальной САУ
Необходимое
условие, которому должна удовлетворять
оптимальная импульсная переходная
функция
 получена Н.Винером в виде интегрального
уравнения
получена Н.Винером в виде интегрального
уравнения
 (11.3.2)
(11.3.2)
при

Корреляционная функция суммарного сигнала на входе определяется выражением

Условие
 отражает принцип физической осуществимости
системы. Если полезный сигнал и помеха
некоррелированы, то
отражает принцип физической осуществимости
системы. Если полезный сигнал и помеха
некоррелированы, то

Уравнение (11.3.2) можно преобразовать к виду
 ,
(11.3.3)
,
(11.3.3)
где
 некоторая
функция, равная нулю при
Это условие приводит к тому, что функция
некоторая
функция, равная нулю при
Это условие приводит к тому, что функция
 связанная с
связанная с
 преобразованием Фурье, не будет
содержать полюсов в верхней полуплоскости
плоскости
преобразованием Фурье, не будет
содержать полюсов в верхней полуплоскости
плоскости
 Преобразование Фурье дает возможность
перейти к спектральным плотностям.
Преобразование Фурье дает возможность
перейти к спектральным плотностям.
 (11.3.4)
(11.3.4)
Предположим, что спектральная плотность входного сигнала имеет дробно-рациональный вид и может быть представлена в виде
 (11.3.5)
(11.3.5)
Здесь
 имеет все нули и полюсы в верхней
полуплоскости, а
имеет все нули и полюсы в верхней
полуплоскости, а
 -в
нижней полуплоскости плоскости
Разделим (11.3.4)
на
-в
нижней полуплоскости плоскости
Разделим (11.3.4)
на
 и получим
и получим
 (11.3.6)
(11.3.6)
Дробь в левой части выражения (11.3.6) можно преобразовать к виду суммы
 причем
причем
 имеет все нули и полюсы только в верхней
полуплоскости, а
имеет все нули и полюсы только в верхней
полуплоскости, а
 -только
в нижней полуплоскости плоскости .
С учетом этого выражение (11.3.6)
преобразуем к виду
-только
в нижней полуплоскости плоскости .
С учетом этого выражение (11.3.6)
преобразуем к виду

Последнее
выражение справедливо для всей плоскости
.
Однако, поскольку необходимо выполнение
условия физической реализуемости
 то решение ищется только в верхней
полуплоскости и указанное выражение
принимает вид
то решение ищется только в верхней
полуплоскости и указанное выражение
принимает вид

Отсюда для амплитудно-фазовой характеристики замкнутой САУ получим
 (11.3.7)
(11.3.7)
Передаточная
функция замкнутой САУ
 По этой передаточной функции определяется
передаточная функция разомкнутой
системы, а затем, с учетом известной
передаточной функции неизменяемой
части, находится передаточная функция
корректирующего устройства.
По этой передаточной функции определяется
передаточная функция разомкнутой
системы, а затем, с учетом известной
передаточной функции неизменяемой
части, находится передаточная функция
корректирующего устройства.
Пример 11.3.1
Полезный сигнал и помеха заданы своими корреляционными функциями:
 ;
;

Полезный
сигнал и помеха не коррелированы.
Идеальная передаточная функция
 ,т.е.
должна быть решена задача оптимальной
фильтрации.
,т.е.
должна быть решена задача оптимальной
фильтрации.
Прежде всего определим спектральные плотности.

Аналогично получим

Далее процесс решения задачи Винера состоит из следующих операций:
1.Вычислим

Здесь

Разложим эту функцию на комплексно-сопряженные множители

Отсюда
2. Вычислим взаимную спектральную плотность
 Ф
Ф
3.
Определим функцию

Приведя к общему знаменателю и приравнивая числители этого и предыдущего выражений, получим систему уравнений, из решения которой будем иметь

4. Вычислим частотную характеристику оптимальной системы
