

Механизм 1. Часть 2.
Определение задаваемых сил и сил инерции

Рис. 2.1 Схема механизма
Определение масс звеньев:
 ,
где
,
где
 длина
звена;
длина
звена;
 погонная масса.
погонная масса.
Масса
камня кривошипа ОА:

Масса
звена ABD:

Масса
ползуна B:

Масса
шатуна DE:

Масса
ползуна E:

Определение координат центров масс в локальных системах координат:
а) Кривошип OA:

б) Координаты центра масс второго звена (ABD) определяются по формулам:
Здесь
 ,
, массы
звеньев AB и BD
соответственно.
массы
звеньев AB и BD
соответственно.
 ,
, ,
, ,
, координаты
центров масс звеньев AB
и BD соответственно в
локальной системе координат относительно
второго звена. Они определяются по
формулам:
координаты
центров масс звеньев AB
и BD соответственно в
локальной системе координат относительно
второго звена. Они определяются по
формулам:


в) Ползун B:


г) Шатун DE:

д) Ползун E:


Определение моментов инерции звеньев:
 ,
где
,
где
 масса
звена;
длина
звена.
масса
звена;
длина
звена.
Моменты инерции ползунов B и E равны нулю:

Момент инерции второго звена определяется по формуле:

Здесь
 ,
, моменты
инерции звеньев AB
и BD соответственно.
Они определяются по формуле:
моменты
инерции звеньев AB
и BD соответственно.
Они определяются по формуле:
, где масса звена; длина звена;
, массы звеньев AB и BD соответственно;
 ,
, расстояния
от центров масс звеньев AB
и BD соответственно
до центра масс второго звена. Они
определяются по формулам:
расстояния
от центров масс звеньев AB
и BD соответственно
до центра масс второго звена. Они
определяются по формулам:


Силы тяжести:
 ,
где
масса
звена;
,
где
масса
звена;
 ускорение
свободного падения.
ускорение
свободного падения.

Силы инерции:
Значения
представлены для положения при
 .
.

Здесь
масса
звена;
 аналоги
ускорения центра масс звена;
аналоги
ускорения центра масс звена;
 угловая
скорость, заданная в начальных условиях.
угловая
скорость, заданная в начальных условиях.
а) Кривошип OA:
б) Звено ABD:
Определяем аналоги ускорения центра масс второго звена:
Координаты центра масс второго звена в глобальной системе координат определяются по формулам:
Аналоги скоростей центра масс звена ABD:
Аналоги ускорений центра масс звена ABD:

Тогда:
в) Ползун B:
г) Шатун DE:
Сначала нужно определить аналоги ускорения центра масс четвёртого звена:
Координаты центра масс четвёртого звена в глобальной системе координат определяются по формулам:

Аналоги скоростей центра масс звена:

Аналоги ускорений центра масс звена:

Тогда:

д) Ползун E:

Моменты сил инерции:
 ,
где
,
где
 момент
инерции звена;
момент
инерции звена;
 соответствующее
угловое ускорение;
угловая
скорость, заданная в начальных условиях.
соответствующее
угловое ускорение;
угловая
скорость, заданная в начальных условиях.
Значения представлены для положения при .
Нагрузка:
Рабочее
давление
 .
.
Давление
холостого хода
 .
.
Атмосферное
давление

Ход
поршня

Диаметр
поршня

Выходное звено 5 совершает поступательное движение, поэтому рабочая нагрузка задается в виде нагрузочной диаграммы, показанной ниже:
Рис.2.2 График зависимости между давлением и ходом поршня
Рис.2.3
Совмещенный график функции
 и нагрузки F
и нагрузки F
Нагрузка
рабочего хода:

Нагрузка
холостого хода:

Все расчёты представлены в приложении в протоколе MathCad.
Составление уравнений кинетостатики
Р ассмотрим
звенья 4 и 5:
ассмотрим
звенья 4 и 5:
Рис. 2.4 Звенья 4 и 5
Уравнения кинетостатики звена 5:

Уравнения кинетостатики звена 4:

По третьему закону Ньютона:

Из этих
уравнений мы можем определить реакции
 Решение
уравнений представлено в приложении в
протоколе MathCad.
Решение
уравнений представлено в приложении в
протоколе MathCad.
Р ассмотрим
звенья 2 и 3
ассмотрим
звенья 2 и 3
Рис. 2.5 Звенья 2 и 3
Уравнения кинетостатики звена 3:
Уравнения кинетостатики звена 2:

По третьему закону Ньютона:


При
решении данных уравнений мы можем
определить реакции
 .
.
Решение уравнений представлено в приложении в протоколе MathCad.
Рассмотрим
звено 1: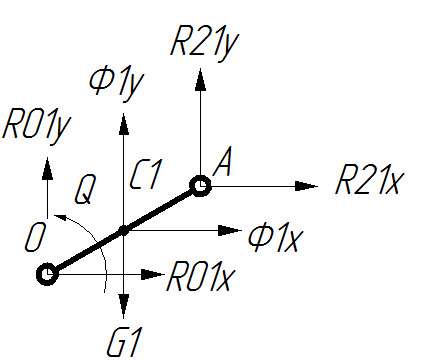
Рис. 2.6 Звено 1
Уравнения кинетостатики звена 1:

Из этих
уравнений мы можем определить

Решение уравнений представлено в приложении в протоколе MathCad.
Н айдем
движущий момент Q с помощью
общего уравнения динамики:
айдем
движущий момент Q с помощью
общего уравнения динамики:
