3.2 Общая формулировка задачи линейного программирования
Линейное программирование - это математическая дисциплина, изучающая методы нахождения наименьшего (или наибольшего) значения линейной функции нескольких переменных, при условии, что последние удовлетворят конечному числу линейных уравнений или неравенств.
Общая математическая формулировка задачи линейного программирования выглядит следующим образом.
Среди неизвестных x1 , x2 ,… , xn , удовлетворяющих системе
a 11х1
+ а12х2
+…+ а1nxn
≥ b1,
11х1
+ а12х2
+…+ а1nxn
≥ b1,
a21x1 + a22x2 +...+ a2nxn ≥ b2,
............................................
am1x1 + am2x2 +...+ amnxn ≥ bm,
x1 ≥ 0, x2 ≥ 0,…, xn ≥ 0,
определить такие, при которых функция F = c1x1 + c2x2 +...+cnxn max (min), т.е. достигает своего наименьшего или наибольшего значения.
Все задачи линейного программирования можно разбить на два вида. Задачи, в которых требуется минимизировать целевую функцию - задачи минимизации. Задачи, в которых требуется максимизировать целевую функцию – задачи максимизации.
Любую задачу максимизации можно свести к задаче минимизации и наоборот.
3.3 Каноническая форма задачи линейного программирования
Задача ЛП, представленная в форме
F = c1x1 + c2x2 +...+cnxn max
a 11х1 + а12х2 +…+ а1nxn = b1,
a21x1 + a22x2 +...+ a2nxn = b2,
............................................
am1x1 + am2x2 +...+ amnxn = bm,
xj ≥ 0 (j=1,2,…,n)
Называется канонической формой задачи ЛП.
Переход от стандартной формы к канонической
Для осуществления данного перехода нужно в каждое из m неравенств системы ограничений ввести m дополнительных переменных s1, s2, …, sm, тогда система ограничений примет вид:
a 11х1 + а12х2 +…+ а1nxn+ s1 = b1,
a21x1 + a22x2 +...+ a2nxn + s2= b2,
............................................
am1x1 + am2x2 +...+ amnxn + sm = bm,
xi ≥ 0, si ≥ 0 (i=1,2,…,m; j=1,2,…,n)
s1, s2, …, sm – выравнивающие, балансовые переменные.
Если в стандартной форме требовалось минимизировать целевую функцию, то вводим
F1=- F = -c1x1 - c2x2 -...- cnxn max
Пример.
Пусть задача линейного программирования задана в стандартной форме:
F = 2х1 + 3х2 max
при ограничениях:
х1+3х2≤18
2 х1+x2≤16
х2≤5
3х1≤21
х10, х2 0
Приведем эту задачу к каноническому виду.
Обратим имеющуюся систему неравенств в равенства, вводя для этого в каждое из них соответствующую неотрицательную переменную:
х1+3х+ s1=18
2 х1+x2 + s2=16
х2 + s3 = 5
3х1+ s4 = 21
хj0, si 0
В данном примере все переменные введены со знаком «+», так как рассматриываемые неравенства имеют знак ≤. Если бы неравенства имели знак , переменные нужно было бы вводить со знаком «-»
§4. Графический метод решения задач лп
Определение 6. Множество точек называется выпуклым, если оно вместе с любыми двумя своими точками содержит весь отрезок, соединяющий эти точки.
Рис а – выпуклое множество, б – не является выпуклым.
Теорема.
Множество решений неравенства с двумя
переменными
![]() является одной из двух полуплоскостей,
на которые вся плоскость делится прямой
является одной из двух полуплоскостей,
на которые вся плоскость делится прямой
![]() ,
включая и эту прямую, а другая полуплоскость
с той же прямой есть множество решений
неравенства
,
включая и эту прямую, а другая полуплоскость
с той же прямой есть множество решений
неравенства
![]()
Пример.
П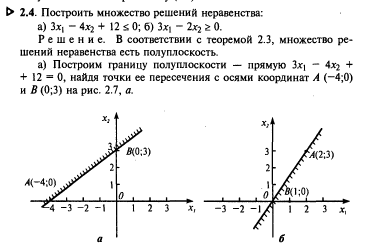 остроить
множество решений неравенства 3х1-4х2+12≤0
остроить
множество решений неравенства 3х1-4х2+12≤0
Построим границу полуплоскости – прямую 3х1-4х2+12=0 по точкам А(-4;0), В(0;3).
Для определения искомой полуплоскости рекомендуется взять произвольную контрольную точку, не лежащую на границе и проверить выполнение неравенства. Если неравенство выполняется, то оно выполняется и во всех точках полуплоскости, содержащей контрольную точку и не выполняется во всех точках другой полуплоскости. В качестве контрольной точки удобно выбирать начало координат. Искомую полуплоскость выделяем штриховкой.
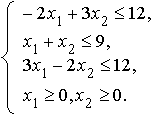
Теорема. Множество решений совместной системы m линейных неравенств с двумя переменными

Является выпуклым многоугольником или выпуклой многоугольной областью.
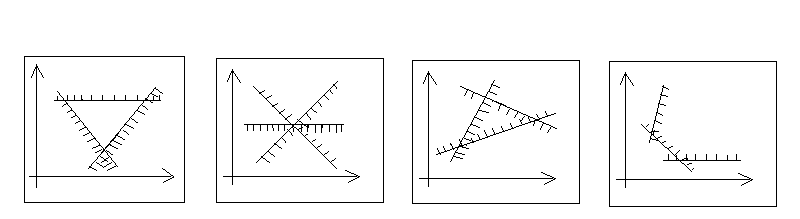
При построении областей решений систем неравенств возможны случаи:
1. Система ограничений несовместна – пустое множество
|
2. Система ограничений имеет единственное решение
|
3. Система ограничений имеет конечное число решений (имеется замкнутая область допустимых решений)
|
4. Система ограничений имеет бесчисленное множество решений
|
Р ассмотрим
задачу ЛП в стандартной форме с двумя
переменными. Т.к. система ограничений
задачи ЛП есть система линейных
неравенств, то множество ее решений
есть выпуклый многоугольник М,
лежащий в первой четверти координатной
плоскости.
ассмотрим
задачу ЛП в стандартной форме с двумя
переменными. Т.к. система ограничений
задачи ЛП есть система линейных
неравенств, то множество ее решений
есть выпуклый многоугольник М,
лежащий в первой четверти координатной
плоскости.
С учетом этого задача формулируется
следующим образом: среди всех точек
выпуклого многоугольника найти такую,
координаты которой минимизируют
(максимизируют) линейную функцию F
= с1х1
+ с2х2
учетом этого задача формулируется
следующим образом: среди всех точек
выпуклого многоугольника найти такую,
координаты которой минимизируют
(максимизируют) линейную функцию F
= с1х1
+ с2х2
Если зафиксировать
какое-нибудь значение функции F
= d,
то получим линейное уравнение с двумя
неизвестными c1x1
+ c2x2
=
d,
график которого есть прямая, перпендикулярная
вектору
![]() ,
которая называется линией уровня. При
изменении d
от - ∞ до + ∞ прямая c1x1
+ c2x2
=
d,
смещаясь параллельно самой себе,
«зачертит» всю плоскость (рис.1).
,
которая называется линией уровня. При
изменении d
от - ∞ до + ∞ прямая c1x1
+ c2x2
=
d,
смещаясь параллельно самой себе,
«зачертит» всю плоскость (рис.1).
П усть
М
– многоугольник решений системы
ограничений (рис.2). При изменении
d
от - ∞ до + ∞ прямая c1x1
+ c2x2
=
d
при некотором значении d
= d1
достигает многоугольника М
и имеет с ним общую точку А
(точка «входа»), а затем, пройдя весь
многоугольник М, при некотором значении
d
= d2
будет иметь
с ним последнюю общую точку В (точка
«выхода»).
усть
М
– многоугольник решений системы
ограничений (рис.2). При изменении
d
от - ∞ до + ∞ прямая c1x1
+ c2x2
=
d
при некотором значении d
= d1
достигает многоугольника М
и имеет с ним общую точку А
(точка «входа»), а затем, пройдя весь
многоугольник М, при некотором значении
d
= d2
будет иметь
с ним последнюю общую точку В (точка
«выхода»).
Наименьшего значения целевая функция F = с1х1 + с2х2 достигает в точке «входа» А и наибольшего значения в точке «выхода» В.
Возможен случай,
когда при перемещении прямой c1x1
+ c2x2
=
d
«вход»
(«выход») прямой в многоугольник решений
М
произойдет по стороне этого многоугольника
(рис, 3, 4). Это случится, если в многоугольнике
М есть стороны, параллельные прямой c1x1
+ c2x2
=
d.
В этом случае точек «входа» («выхода»)
бесчисленное множество, минимальное
(максимальное) значение целевая функция
принимает во всех точках этой стороны
многоугольника.
стороны, параллельные прямой c1x1
+ c2x2
=
d.
В этом случае точек «входа» («выхода»)
бесчисленное множество, минимальное
(максимальное) значение целевая функция
принимает во всех точках этой стороны
многоугольника.
Так, координаты всех точек отрезка AD (рис. 3) минимизируют значение функции F = с1х1 + с2х2 а координаты всех точек отрезка AB (рис. 4) максимизируют значение целевой функции.
В случае открытых областей прямая c1x1+c2x2 = d при изменении d от - ∞ до + ∞ не имеет точки «выхода» из области решений (рис. 5). Тогда максимальное значение функцией не достигается.
У читывая,
что оптимальное значение целевая функция
принимает в точках «входа» и «выхода»,
то есть в вершинах области решений,
существует следующий план графического
решения задачи линейного программирования:
читывая,
что оптимальное значение целевая функция
принимает в точках «входа» и «выхода»,
то есть в вершинах области решений,
существует следующий план графического
решения задачи линейного программирования:
Построить математическую модель задачи.
На координатной плоскости построить множество допустимых решений.
Построить вектор
Построить линии уровня для целевой функции.
Параллельным переносом этой прямой в направлении вектора определить, какие из вершин многоугольника допустимых решений являются точками «входа» или «выхода» в зависимости от требования задачи.
Найти координаты точек «входа» («выхода»)
Вычислить оптимальное значение функции.
Провести интерпретацию полученного решения.
Уточнить математическую модель (если необходимо).
Пример
Пусть
в результате экономического исследования
была построена следующая задача, целевая
функция определена и имеет вид
![]() ,
система ограничений
,
система ограничений