Лекция 9.
8.4. Диапазон высот и скоростей полета вертолета
Границы эксплуатационного диапазона скоростей и высот полета вертолета при-ведены на рис. 38.
М
Рис.38
ис.
38
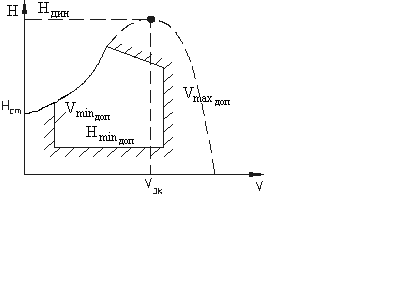
Максимальная высота полета ограничена из-за опасности общего срыва потока с лопастей, которые на больших высотах для создания необходимой подъемной силы приходится переводить на большие углы установки (атаки).
Висение
рекомендуется только на малых высотах
на взлете, на посадке и в специальных
случаях. В обычном полете на вертолете,
так же как и на самолете, минимальная
скорость ограничена минимально
допустимой скоростью
![]() .Ограничения
и
минимальной высоты обеспечивают
безопасный переход винта на режим
авторотации после остановки двигателя.
Они также исключают неправильные
показания указателя скорости.
.Ограничения
и
минимальной высоты обеспечивают
безопасный переход винта на режим
авторотации после остановки двигателя.
Они также исключают неправильные
показания указателя скорости.
П
Рис.
39
![]() больше статического и достигает 5 - 8
км.
больше статического и достигает 5 - 8
км.
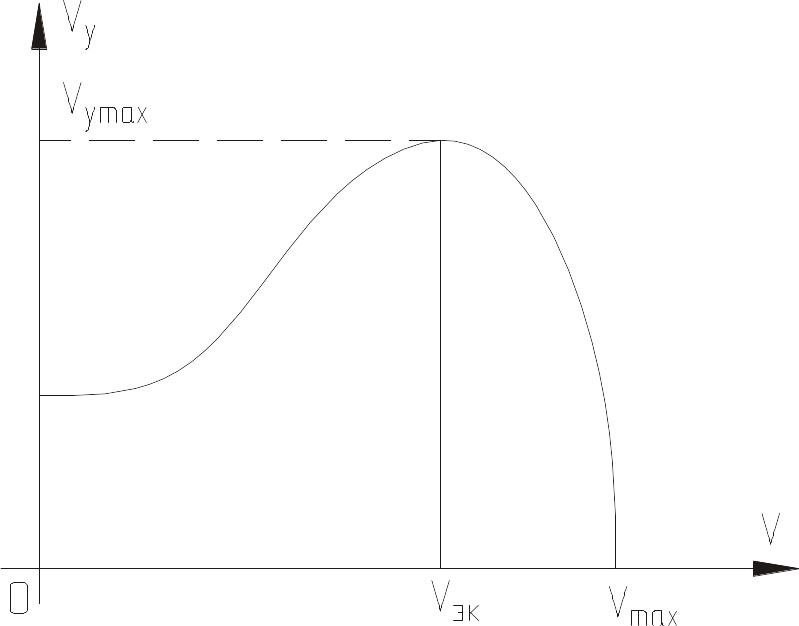
В наборе высоты вертикальная скорость равна
![]() .
.
Видно, что наибольшее значение вертикальной скорости набора высоты достигается при скорости V=Vэк., где избыточная мощность максимальна. График зависимости Vy(V) приведен на рисунке 39. Максимальная вертикальная скорость у вертолета равна примерно 10-20 м/с.
С
![]() хема
сил вертолета при выполнении разворота
в горизонтальной плоскости отличается
от схемы сил самолета несущественно
(рис.40)
хема
сил вертолета при выполнении разворота
в горизонтальной плоскости отличается
от схемы сил самолета несущественно
(рис.40)
Рис.
40а)

![]()
Рис.
40а, б)
![]() (после деления из первого соотношения)
(после деления из первого соотношения)
![]() ,
(8.20)
,
(8.20)
а угловая скорость Г равна
 ,
(8.21)
,
(8.21)
где
нормальная перегрузка в скоростной СК
![]()
Н
Рис.
41

![]() ,
а максимальный угол крена ра вен
max4560o.
,
а максимальный угол крена ра вен
max4560o.
С
Рис.
42

В
Рис.
43
Рис. 44 а) Рис. 44 б) Рис. 44 в) Рис. 44 г) |