

Лекция 17
Электропривод с линейными двигателями
Введение. Приводы подач всех современных металлообрабатывающих станков с ЧПУ, в том числе и электроэрозионных (ЭЭ) строятся по традиционной схеме. Так, в одном из типажей ЭЭ станков перемещения рабочего органа РО (каретки подач) осуществляется от двигателя постоянного тока через ременную передачу на ходовой винт. Через шариковую гайку (она скреплена с РО пружинами механизма защиты от соударений) вращение винта трансформируется в продольное перемещение РО
.
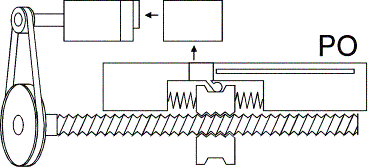
Рис.1
Более надежные и современные приводы выполнены без ременной передачи. В этих приводах высокомоментный двигатель переменного тока непосредственно соединен с ходовым винтом.

Рис.2.
Недостатки указанных видов приводов достаточно известны и очевидны:
-большое количество промежуточных элементов от источника энергии до РО;
-громадная инерционность этих элементов, особенно в крупногабаритных станках;
-наличие зазоров в передающих устройствах;
-трение во множестве сопрягаемых деталей (резко изменяющееся при переходе системы из состояния покоя в состояние движения);
-температурные и упругие деформации практически всех передающих звеньев;
-износ сопрягаемых элементов в процессе эксплуатации и потеря исходной точности;
-погрешности в шаге ходового винта и накопленная погрешность по длине.
Поскольку эти недостатки определяют основные качественные характеристики приводов (точность и равномерность хода РО, величину мертвого хода при реверсе, допустимые ускорения и скорости РО), конструкторская мысль станкостроителей давно пытается как-то уменьшить их влияние на работу приводов и оборудования в целом. Например, в соединении ходового винта с гайкой для уменьшения трения уже давно используют дорогое и сложное шариковинтовое соединение; для ликвидации зазоров в соединение винта с гайкой вводятся специальные устройства натяга соединения; ходовые винты особо точных станков изготавливают по классу эталонных; погрешности шага винтов пытаются скомпенсировать системами компенсаторов; в борьбе с температурными деформациями создаются изощрённые системы охлаждения и т.д. Проблемы, проблемы, проблемы... И уже давно ясно, что проблемы приводов с ходовыми винтами не решить никогда из-за их физико-технической сущности и построенного типа, как такового. Архаичность рассмотренных приводов давно очевидна и передовая конструкторская мысль уже много лет работала над задачей кардинальной замены типовых приводов в металлообрабатывающем оборудовании на какие-то другие, более совершенные.
И таким решением стало использование в качестве приводов подач станков линейных двигателей.
Линейные шаговые двигатели При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма. Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
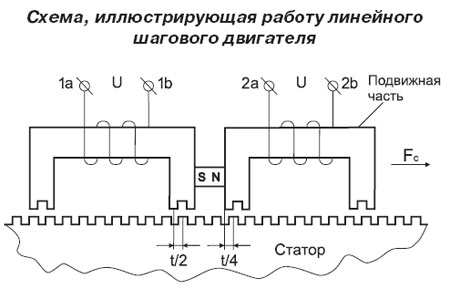
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом. Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части. Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.ΔXш=tz/Кtгде Kt — число тактов схемы управления. Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели. В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Схемы управления. Управление ШД, как уже отмечалось, обеспечивается электронным блоком.
Современные блоки управления ШД состоят из нескольких функциональных узлов, выполняемых по различным схемам и с использованием разнообразных элементов. Стремление расширить область применения дискретного привода, повысить качество и точность его движения, а также надежность, упростить наладку и эксплуатацию отразилось в унификации схем управления ШД.
Рассмотрим обобщенную функциональную схему ЭП с ШД. Основная ее часть, обычно называемая разомкнутой схемой, выделена штриховой линией.
Сигнал управления
![]() в виде импульсов напряжения поступает,
а вход блока 2 от программного или другого
внешнего командного устройства. Блок
2 видоизменяет эти импульсы, формируя
их по длительности и амплитуде, как
необходимо для нормальной работа
последующих блоков схемы управления.
Распределитель импульсов 3 преобразует
последовательность сформированных
импульсов, например в четырехфазную
систему однополярных импульсов
напряжения, соответствующую числу фаз
(обмоток) двигателя.
в виде импульсов напряжения поступает,
а вход блока 2 от программного или другого
внешнего командного устройства. Блок
2 видоизменяет эти импульсы, формируя
их по длительности и амплитуде, как
необходимо для нормальной работа
последующих блоков схемы управления.
Распределитель импульсов 3 преобразует
последовательность сформированных
импульсов, например в четырехфазную
систему однополярных импульсов
напряжения, соответствующую числу фаз
(обмоток) двигателя.
И мпульсы
с выхода распределителя 3 усиливаются
с помощью промежуточного усилителя 4 и
поступают на коммутатор 5, питающий
обмотки ШД 8. Обычно коммутатор питается
от источника постоянного тока (выпрямителя)
12 и обеспечивает в обмотках ШД пульсирующий
ток одного направления.
мпульсы
с выхода распределителя 3 усиливаются
с помощью промежуточного усилителя 4 и
поступают на коммутатор 5, питающий
обмотки ШД 8. Обычно коммутатор питается
от источника постоянного тока (выпрямителя)
12 и обеспечивает в обмотках ШД пульсирующий
ток одного направления.
Рассмотренная разомкнутая схема управления ШД не всегда обеспечивает высокие динамические свойства, точность и энергетические показатели ЭП. Поэтому современные схемы управления ШД содержат дополнительные узлы, с помощью которых характеристики ЭП улучшаются. К таким узлам относятся частотно - импульсный регулятор напряжения 11, усилитель обратной связи тока, блок электронного дробления шага 13, блок плавного разгона и торможения (задатчик интенсивности) 1, датчик положения ротора и скорости 7, и цифровой регулятор б.
Регулятор 11 и усилитель 10, связанные с узлом сравнения 9, служат для автоматической стабилизации тока в обмотках ШД и подержания его момента, что существенно улучшает энергетические показатели работы двигателя. Стабилизация тока осуществляется введением отрицательной обратной связи по току, с помощью которой за счет регулирования частоты переключения регулятора (частотно-импульсная модуляция) изменяется среднее значение напряжения питания и тем самым регулируется ток в обмотках ШД.
Задача формирования тока в обмотках ШД решается также при использовании коммутатора 5, обладающего свойствами источника тока. В этом случае отпадает надобность в обратной связи току и блоках 11 и 10.
Для улучшения качества движения ШД при низких частотах повышения точности отработки входных импульсов управления помощью блока 13 уменьшается единичный шаг ШД.
Улучшение динамических свойств дискретного ШД, в частности увеличение диапазона рабочих частот входного сигнала, значительно превышающих частоту приёмистости двигателя, может быть достигнуто введением в схему блока 1, обеспечивающего разгон и торможение двигателя с заданным темпом, при котором еще не происходит пропускание управляющих импульсов. При использовании блока 1 область рабочих частот шагового электропривода может бы увеличена в 2... 3 раза.
Возможности дискретного ЭП расширяются при использовании замкнутых схем управления на основе датчика 7 и регулятора 6. В таком дискретном приводе информация о действительном положении вала и скорости ШД поступает на вход цифрового регулятора б, который обеспечивает заданный характер движения привода. Перспективы дальнейшего развития ЭП с ШД связаны с использованием микропроцессорных средств управления. В этом случае функции всех показанных на рисунке блоков управления, за исключением силового коммутатора, датчиков скорости и положения, выполняет микропроцессор по соответствующей программе. Как говорят в таких случаях, аппаратная реализация схемы управления ШД заменяется более гибкой и функционально богатой — программной.
Область применения дискретного привода постоянно расширяется. Его используют кроме указанных ранее случаев в резательных и сварочных автоматах, часах, нажимных устройств прокатных станов, лентопротяжных и регистрирующих устройствах, в медицинской технике, в производстве элементов микроэлектроники и др.
Существует большое разнообразие линейных двигателей.