

Приклад 1 розв’язання задачі д.6. Третій рівень складності.
Однорідна прямокутна горизонтальна платформа зі сторонами R і 2R, де R=1 м, маси m1=20 кг обертається з кутовою швидкістю ω0 =8 c-1 навколо вертикальної осі z, яка відстоїть на відстані b=OC від центра ваги С платформи (рис. 21.17).
В
момент часу t0=0
по прямолінійному жолобу KE
платформи починає рухатись під дією
внутрішніх сил тягар D
маси m2=6
кг за законом S=AD=f(t),
де S
виражено в метрах, t—в
секундах. Одночасно на платформу починає
діяти пара сил з моментом
![]() Нм.
Нм.
Дано: m1=20 кг; m2=6 кг; ω0=8 с-1; R=1 м; b=ОС=R; M=3t2+t Нм; S=AD=0,3cos(2t) м.
Визначити: ω=f(t) - залежність кутової швидкості платформи від часу t.
Розв’язання. Розглянемо механічну систему, що складається з платформи і тягаря D. Використаємо теорему про зміну кінетичного моменту системи відносно осі z
. (1)
Покажемо на рис. 21.17 всі зовнішні сили, що діють на систему. Оскільки всі задані сили і реакції опор або паралельні до осі z, або цю вісь перетинають, то їх моменти відносно осі z дорівнюють нулю. Тоді рівняння (1) приймає вигляд
;
![]() (2)
(2)
Розділимо змінні в рівнянні (2) і проінтегруємо:
![]() ;
;
![]() .
(3)
.
(3)
Далі розв’язання задачі аналогічне наведеному в прикладі розв’язання задачі Д.6 другого рівня складності. Одержимо
![]() (4)
(4)
![]() ,
,
де
![]() ;
(5)
;
(5)
(6)
![]() (7)
(7)
![]() (8)
(8)
В
рівняння (3) підставимо знайдене значення
кінетичного моменту
![]() :
:
![]() .
(9)
.
(9)
Визначимо сталу інтегрування C1: при t0=0 ω=ω0, тоді
;
![]() .
(10)
.
(10)
Одержимо
![]() ,
(11)
,
(11)
звідки
![]() .
(12)
.
(12)
Відповідь:
![]() .
.
Приклад 2 розв’язання задачі Д.6. Перший рівень складності.
Однорідна кругла горизонтальна платформа радіуса R=1 м і маси m1=20 кг обертається з кутовою швидкістю ω0 =8 c-1 навколо вертикальної осі z, що проходить через центр ваги С платформи (рис. 21.18).
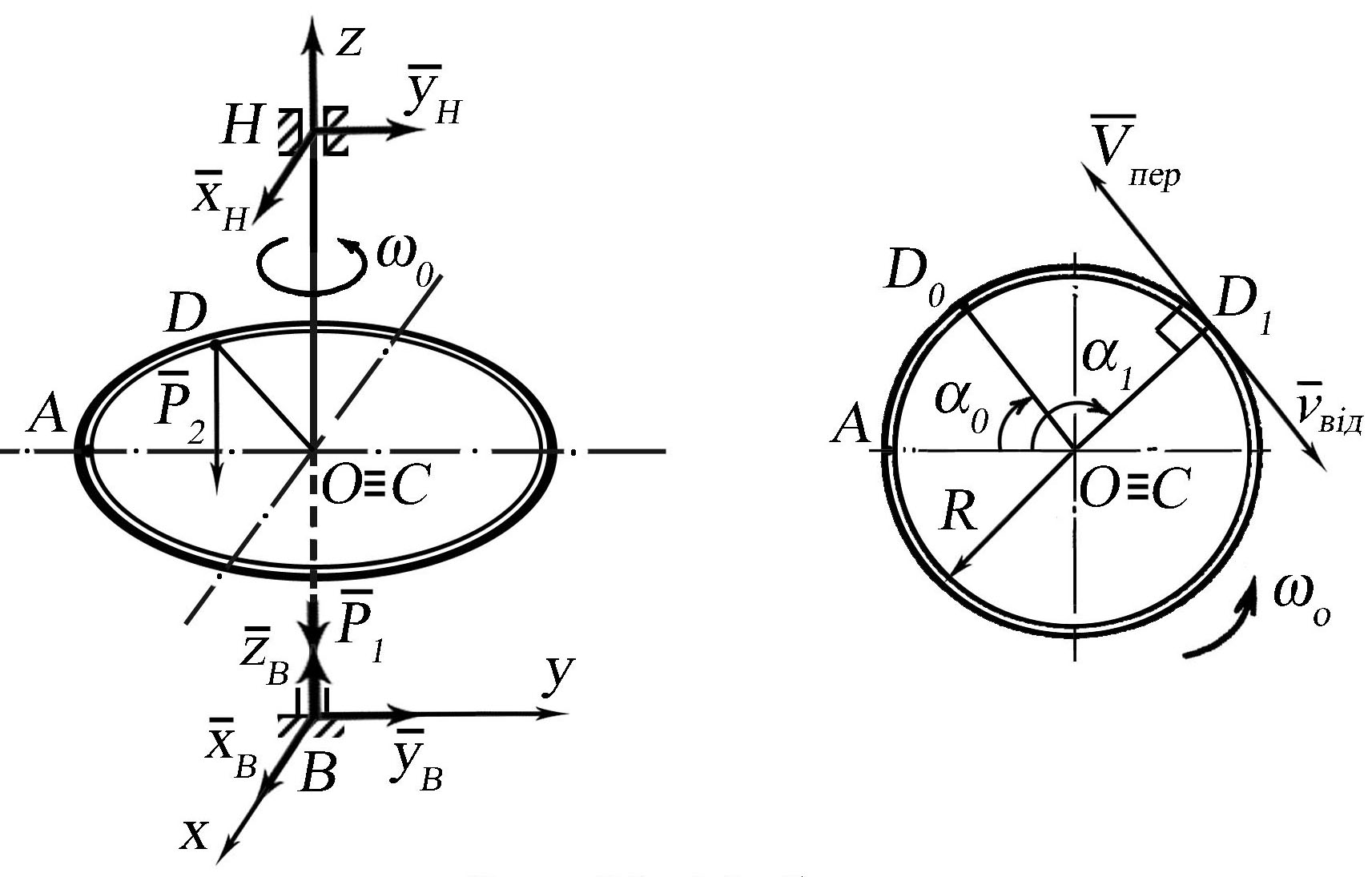
Рис. 21. 18.
В
момент часу t0=0
по
жолобу платформи починає рухатись під
дією внутрішніх сил тягар D
маси m2=6
кг за законом
![]() .
Форма жолоба—коло радіуса R
(обід платформи).
.
Форма жолоба—коло радіуса R
(обід платформи).
Дано:
m1=20
кг; m2=6
кг; ω0=8
с-1;
R=1
м; b=0;
![]() м; t1=1
с.
м; t1=1
с.
Визначити: кутову швидкість ω1 платформи в момент часу t1.
Розв’язання. Розглянемо механічну систему, що складається з платформи і тягаря D. Використаємо теорему про зміну кінетичного моменту системи відносно осі z
. (1)
Покажемо
на рис. 21.18 всі зовнішні сили, що діють
на систему: сили ваги
і
,
складові
![]() реакції
підп’ятника
B,
складові
реакції підшипника H.
Оскільки всі ці сили або перетинають
вісь
z,
або
до неї паралельні, то
реакції
підп’ятника
B,
складові
реакції підшипника H.
Оскільки всі ці сили або перетинають
вісь
z,
або
до неї паралельні, то
![]() ,
,
![]() і
і
![]() . (2)
. (2)
Для даної механічної системи
![]() ,
(3)
,
(3)
де і - кінетичні моменти платформи і тягаря D відповідно.
Платформа обертається навколо нерухомої осі z:
![]() (4)
(4)
де
![]() .
.
Тоді
![]() (5)
(5)
Тягар D виконує складний рух; будемо вважати його рух по платформі відносним, а обертання самої платформи—переносним рухом, тоді абсолютна швидкість тягаря
, (6)
де
![]() ;
;
![]() .
.
Визначимо
положення точки D
на ободі платформи в моменти часу
![]() і
і
![]() с:
с:
![]() ;
;
![]() ;
;
![]() ;
(7)
;
(7)
![]() ;
;
![]() ;
;
![]() .
.
Покажемо
на рисунку 21.18 точки D0
і D1,
положення
яких визначається кутами
![]() і
і
![]() відповідно.
відповідно.
Для
положення тягаря D1
зображаємо вектор відносної швидкості
![]() (в бік збільшення дугової координати
S)
і вектор переносної швидкості
(в бік збільшення дугової координати
S)
і вектор переносної швидкості
![]() (в бік обертання платформи за напрямом
ω0).
(в бік обертання платформи за напрямом
ω0).
За теоремою Варіньона
 (9)
(9)
Тоді одержимо
 (10)
(10)
Підставимо значення кінетичного моменту в рівняння (2):
![]() .
(11)
.
(11)
При t0=0 ω=ω0, тоді
![]() ;
(12)
;
(12)
![]()
![]() ,
(13)
,
(13)
звідки
![]() .
(14)
.
(14)
При t1=1 с
![]() с-1.
с-1.
Відповідь: ω1=8,79 с-1.