

Приклад 1 розв’язання задачі д.6. Перший рівень складності.
Однорідна прямокутна горизонтальна платформа зі сторонами R і 2R, де R=1 м, маси m1=20 кг обертається з кутовою швидкістю ω0 =8 c-1 навколо вертикальної осі z, яка проходить через центр ваги С платформи (рис. 21.16).
В момент часу t0=0 по прямолінійному жолобу KE платформи починає рухатись під дією внутрішніх сил тягар D маси m2=6 кг за законом S=AD=f(t), де S виражено в метрах, t—в секундах. Одночасно на платформу починає діяти пара сил з моментом M=5 Нм.
Дано: m1=20 кг; m2=6 кг; ω0=8 с-1; R=1 м; b=0; M=5 Нм;
S=AD=0,3cos(2t) м.
Визначити: ω=f(t) - залежність кутової швидкості платформи від часу.
Розв’язання. Розглянемо механічну систему, що складається з платформи і тягаря D. Використаємо теорему про зміну кінетичного моменту системи відносно осі z
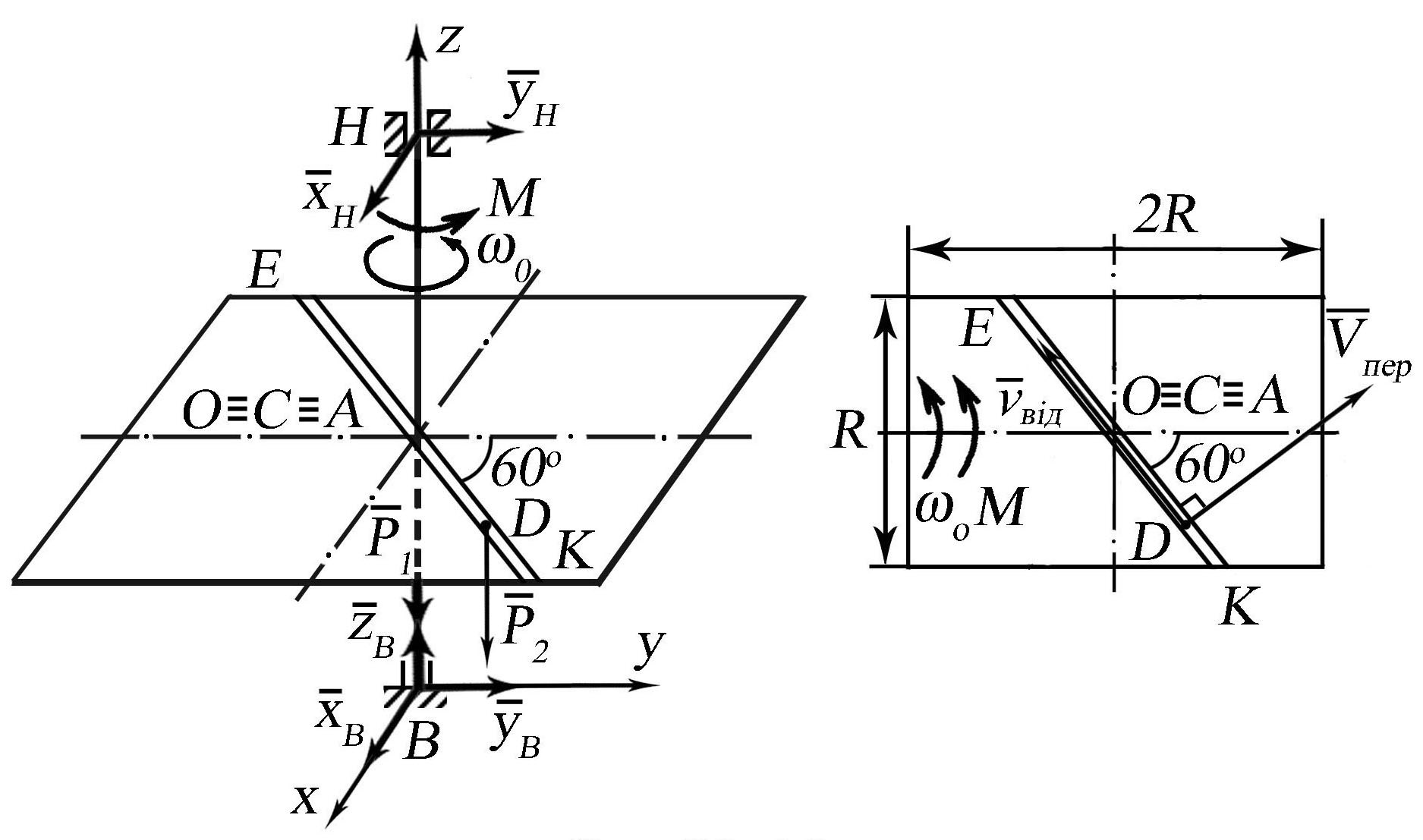
Рис. 21. 16.
![]()
![]() .
(1)
.
(1)
Покажемо
на рис. 21.16 всі зовнішні сили, що діють
на систему: сили ваги
![]() і
і
![]() ,
складові
,
складові
![]() реакції підп’ятника B,
складові
реакції підп’ятника B,
складові
![]() реакції підшипника H
і пару сил з моментом
M.
Оскільки
всі задані сили і реакції опор або
паралельні до осі
z,
або
цю вісь перетинають, то їх моменти
відносно осі z
дорівнюють
нулю. Тоді рівняння (1) приймає вигляд
реакції підшипника H
і пару сил з моментом
M.
Оскільки
всі задані сили і реакції опор або
паралельні до осі
z,
або
цю вісь перетинають, то їх моменти
відносно осі z
дорівнюють
нулю. Тоді рівняння (1) приймає вигляд
![]() .
(2)
.
(2)
Розділимо змінні і проінтегруємо, враховуючи, що M =5 Нм:
![]() ;
;
![]() .
(3)
.
(3)
Для даної механічної системи
![]() (4)
(4)
де
![]() і
і
![]() -
кінетичні моменти платформи і тягаря
D
відповідно.
-
кінетичні моменти платформи і тягаря
D
відповідно.
Платформа обертається навколо нерухомої осі z:
![]() ,
(5)
,
(5)
де
![]() .
.
Тоді
![]() .
(6)
.
(6)
Тягар D виконує складний рух; будемо вважати його рух по платформі відносним, а обертання самої платформи—переносним рухом, тоді абсолютна швидкість тягаря
,
де
![]() ;
;
![]()
Покажемо
на рисунку 21.16 вектор
з урахуванням одержаного знака (вздовж
жолоба від D
до A—в
бік зменшення координати S)
і вектор
![]() в бік обертання платформи (в бік кутової
швидкості
в бік обертання платформи (в бік кутової
швидкості
![]() ).
).
За теоремою Варіньона

Момент
кількості руху
![]() ,оскільки
вектор
перетинає вісь z.
,оскільки
вектор
перетинає вісь z.
З рис. 21.16 знаходимо
![]()
Тоді
![]() .
(8)
.
(8)
Одержимо
 (9)
(9)
Підставимо значення кінетичного моменту системи в рівняння (3):
![]() (10)
(10)
Визначимо C1: при t0=0 ω=ω0=8 c-1 , тоді
![]() ;
(11)
;
(11)
![]() ,
(12)
,
(12)
звідки
 .
(13)
.
(13)
З урахуванням числових даних задачі
Відповідь:
![]() .
.
Приклад 1 розв’язання задачі Д.6. Другий рівень складності.
Однорідна прямокутна горизонтальна платформа зі сторонами R і 2R, де R=1 м, маси m1=20 кг обертається з кутовою швидкістю ω0 =8 c-1 навколо вертикальної осі z, яка відстоїть на відстані ОC=b від центра ваги С платформи (рис. 21.17).
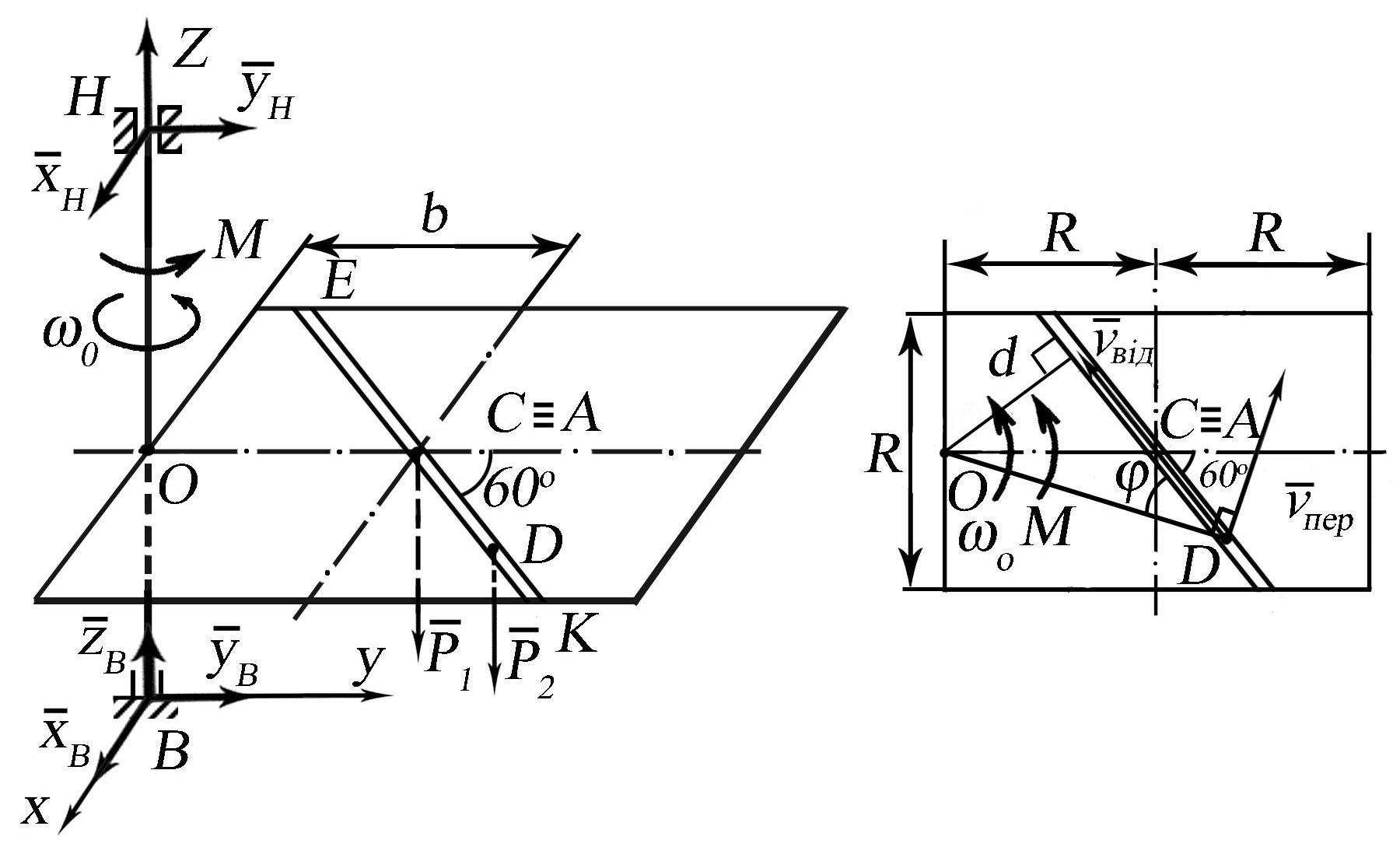
Рис. 21. 17.
В момент часу t0=0 по прямолінійному жолобу KE платформи починає рухатись під дією внутрішніх сил тягар D маси m2=6 кг за законом S=AD=f(t), де S виражено в метрах, t—в секундах. Одночасно на платформу починає діяти пара сил з моментом M=5 Нм .
Дано: m1=20 кг; m2=6 кг; ω0=8 с-1; R=1 м; b=ОС=R; M=5 Нм; S=AD=0,3cos(2t) м.
Визначити: ω=f(t) - залежність кутової швидкості платформи від часу t.
Розв’язання. Розглянемо механічну систему, що складається з платформи і тягаря D. Використаємо теорему про зміну кінетичного моменту системи відносно осі z
. (1)
Використавши пояснення до прикладу розв’язання задачі першого рівня складності, одержимо
; (2)
. (3)
Для даної механічної системи
(4)
де і - кінетичні моменти платформи і тягаря D відповідно.
Платформа обертається навколо нерухомої осі z:
![]() (5)
(5)
За теоремою Штейнера – Гюйгенса
Отже, одержимо
![]() (6)
(6)
Тягар D виконує складний рух; тому його абсолютна швидкість
, (7)
де
;
Покажемо на рис. 21.17 вектор з урахуванням одержаного знака і вектор в бік обертання.
За теоремою Варіньона
тут d—перпендикуляр, опущений з осі на вектор .
Визначимо відстані d і OD. З рис. 21.17 одержимо
![]() .
.
Визначимо
![]() .
За
теоремою сінусів з
.
За
теоремою сінусів з
![]() одержимо
одержимо
![]() ,
,
звідки
![]() .
.
Тоді
![]()
![]() =0,866R;
=0,866R;
![]() (8)
(8)
Одержимо

Враховуючи числові дані задачі, одержимо
 (9)
(9)
В
рівняння (3) підставимо одержане значення
кінетичного моменту
![]() :
:
![]() =
=![]() (10)
(10)
Визначимо C1: при t0=0 ω=ω0, тоді
![]() ;
;
![]() .
(11)
.
(11)
Одержимо
![]()
![]() ,
(12)
,
(12)
звідки
![]() .
(13)
.
(13)
Відповідь:
![]() .
.