

1.3. Промышленный робот Бриг – 10б
Промышленные роботы (ПР) отличаются большим разнообразием областей применения, структурно-кинематических схем, компоновок, конструкций, характеристик и принципов управления.
ПР классифицируются по следующим признакам:
- целевому назначению (характеру выполняемых работ);
- степени специализации функций;
- информационным возможностям и методам управления.
По целевому назначению, характеризующему конструктивные и технологические способности, ПР делятся на 2 группы:
- производственные;
- подъемно-транспортные.
Производственные ПР непосредственно участвуют в технологических процессах в качестве производящих или обрабатывающих автоматизированных машин, выполняющих некоторые основные операции: сварку, окраску, сборку, контроль и т.д. Для таких ПР характерно оснащение рабочих органов манипуляторов каким–либо инструментом: отверткой, гайковертом, краскораспылителем или сварочным устройством.
Производственные ПР обычно используют в поточных линиях, где несколько ПР, установленных вдоль конвейера, последовательно выполняют отдельные технологические переходы.
Подъемно–транспортные ПР предназначены для обслуживания основного технологического оборудования (станков, прессов, литейных и других машин) и могут выполнять операции установки–снятия заготовок и деталей, смены и установки инструмента и технологической оснастки, очистки баз деталей, самого оборудования или приспособлений, контроля размеров заготовок и деталей.
На рис. 1 представлена схема технологического модуля в составе агрегатного станка А-26В и обслуживающего его ПР «Бриг-10Б».
Краткая техническая характеристика пр Бриг-10б
Число степеней свободы…………………………………..……...……….5
Число точек остановок при повороте ручки………………………….….3
при остальных перемещениях…………………………….....……………2
Точность позиционирования…………………...……………..……….±0,3
Грузоподъемность, кг………………………………………….…………..3
Тип привода…………………………………………..…...пневматический
Система управления…………………………………...………….цикловая
Пульт управления……………………...............................…..электронный
Программоноситель………………………………...…..штекерная панель
Устройство и принцип работы пр Бриг-10б
Робот промышленный «Бриг-10Б» (рис. 6) состоит из механической руки 1, связанной с основанием 13 при помощи механизмов подъема 3 и поворота 2. К руке крепится кисть, состоящая из следующих узлов: ползуна 4, механизма поворота кисти 5 и привода схвата 6.
Ползун 4 предназначен дл совершения поперечных перемещений кисти, необходимых, например, при дозагрузке детали в патрон станка. На основании 13 расположено электрооборудование 7, пневмооборудование 8, шкаф 9, кожуха 10, 11.
Все исполнительные органы робота содержат пневматические цилиндры, срабатывающие в заданной последовательности от электровоздухораспределителей по командам, запрограммированным на штекерной панели пульта управления.
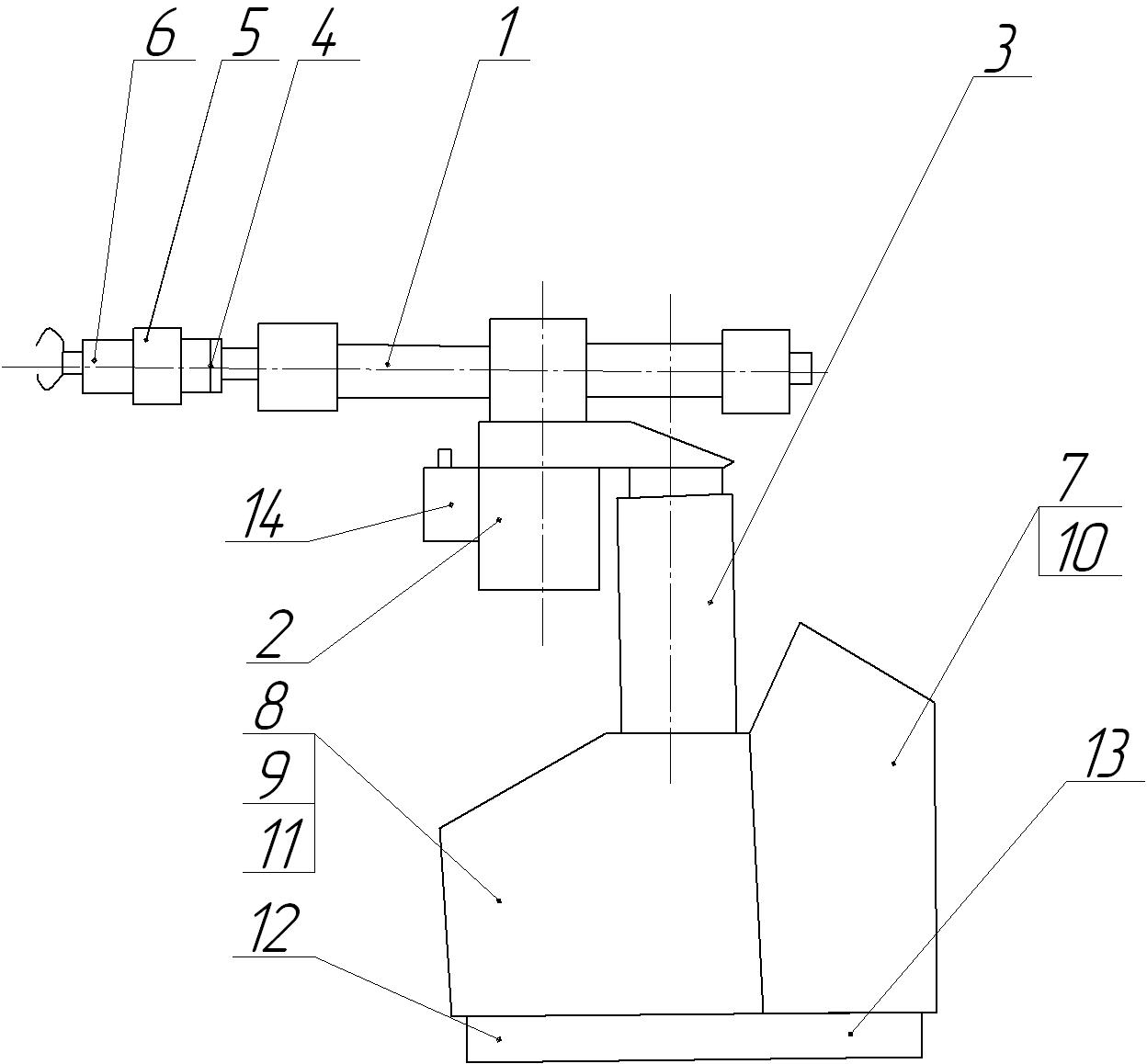
Рис. 6. Общий вид промышленного робота Бриг-10Б
1.4. Порядок выполнения работы
1.4.1. Изучить общее устройство станка, промышленного робота, систем циклового программного управления.
1.4.2. Изобразить кинематическую схему, направления исполнительных движений, расчетные перемещения и записать уравнение кинематического баланса для заданного преподавателем агрегата (узла) станка (робота).