

3.2 Системы возбуждения и управления эд
Как уже было сказано ранее на нефтяных месторождениях применяются электродвигатели, которым необходимо пусковое оборудование, системы возбуждения и управления.
Асинхронный двигатель с короткозамкнутым ротором
Для пуска асинхронных двигателей применяют специальные устройства для плавного пуска, так как одним из главных недостатков асинхронного электрического двигателя с короткозамкнутым ротором считается наличие у него больших пусковых токов. Если теоретически методы снижения этих толчков были разработаны хорошо уже давно, то практически эти разработки (применение пусковых реакторов и резисторов, переключение с звезды на треугольник, применение тиристорных регуляторов напряжения) применялись в очень редких случаях.
Однако недавно все резко изменилось, так как благодаря прогрессу микропроцессорной техники и силовой электроники на рынке появились удобные, компактные и весьма эффективные софтстартеры - устройства плавного пуска электродвигателя.
Устройство плавного пуска - это устройство, значительно увеличивающее срок эксплуатации электрического двигателя и исполнительных устройств, которые работают от вала данного двигателя. В случае подачи напряжения питания обыкновенным способом, происходят процессы, которые разрушают электродвигатель. Напряжение и пусковой ток на обмотках двигателя во время переходных процессов, в значительной степени превышают допустимые значения. Именно это и становится причиной износа и пробоя изоляции обмоток, «подгорания» контактов, значительно сокращая срок службы подшипников и самого двигателя, и различных устройств, которые «сидят» на валу электродвигателя.
Обеспечение необходимой пусковой мощности требует увеличения номинальной мощности питающих электрических сетей, это приводит к удорожанию оборудования, а также перерасходу электрической энергии. Помимо этого, «просадка» напряжения питания при пуске электродвигателя способна стать причиной порчи оборудования, задействованного от данных источников питания, эта «просадка» наносит непоправимый ущерб оборудованию электрического снабжения, уменьшает его срок службы. В момент пуска двигатель является важным источником электромагнитных помех, которые нарушают работу оборудования, запитанного от данных электрических сетей, либо находящихся в близости от двигателя. Когда произошла аварийная ситуация - двигатель перегрелся либо сгорел из-за нагрева - параметры трансформаторной стали меняются настолько сильно, что номинальная мощность, исправленного двигателя, может снизиться более, чем на 30%, поэтому этот электродвигатель окажется совершенно непригодным к применению на прежнем месте. Именно поэтому бесперебойное питание дома и других важных объектов невозможно без устройства плавного пуска электрических двигателей, которое объединяет функции и плавного пуска, и плавного торможения, и защиты механизмов, и защиты электродвигателей.
Плавный пуск при помощи софтстартера реализуется плавным подъемом напряжения для медленного и безопасного разгона двигателя и уменьшения пусковых токов. При этом регулируемыми параметрами являются и начальное напряжение, и время торможения, и время разгона электродвигателя. Маленькое значение напряжения начального способно значительно уменьшить пусковой момент электрического двигателя, поэтому оно зачастую устанавливается в пределах от 30 до 60 процентов от значения напряжения номинального.
Асинхронный двигатель с короткозамкнутым ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора. Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
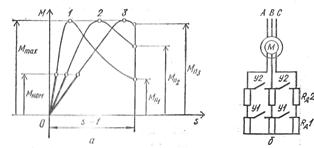
Рисунок 2. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 - 7) Iном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.
Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рисунок 2 а, кривая 3), если критическое скольжение двигателя с фазным ротором
sкр = (R2' + Rд') / (Х1 + Х2') = 1,
где Rд' — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 - 0,4) Mном, нормальным, если Мп — (0,5 - 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рисунок 3), а также ускорение.
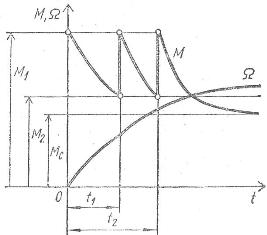
Рисунок 3. Пусковые характеристики трехфазного асинхронного двигателя с фазным ротором
Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 - 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 - 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
Синхронные двигатели
Синхронные двигатели получили широкое распространение в промышленности для электроприводов, работающих с постоянной скоростью (компрессоров, насосов и т.д.). В последнее время, вследствие появления преобразовательной полупроводниковой техники, разрабатываются регулируемые синхронные электроприводы. Синхронный двигатель несколько сложнее, чем асинхронный, но обладает рядом преимуществ, что позволяет применять его в ряде случаев вместо асинхронного:
1. Основным достоинством синхронного электродвигателя является возможность получения оптимального режима по реактивной энергии, который осуществляется путем автоматического регулирования тока возбуждения двигателя. Синхронный двигатель может работать, не потребляя и не отдавая реактивной энергии в сеть, при коэффициенте мощности (cosf) равным единице. Если для предприятия необходима выработка реактивной энергии, то синхронный электродвигатель, работая с перевозбуждением, может отдавать ее в сеть.
2. Синхронные электродвигатели менее чувствительны к колебаниям напряжения сети, чем асинхронные электродвигатели. Их максимальный момент пропорционален напряжению сети, в то время как критический момент асинхронного электродвигателя пропорционален квадрату напряжения.
3. Синхронные электродвигатели имеют высокую перегрузочную способность. Кроме того, перегрузочная способность синхронного двигателя может быть автоматически увеличена за счет повышения тока возбуждения, например, при резком кратковременном повышении нагрузки на валу двигателя.
4. Скорость вращения синхронного двигателя остается неизменной при любой нагрузке на валу в пределах его перегрузочной способности.
Возможны следующие способы пуска синхронного двигателя: асинхронный пуск на полное напряжение сети и пуск на пониженное напряжение через реактор или автотрансформатор.
Асинхронный пуск синхронного электродвигателя
Схема возбуждения синхронного двигателя с глухоподключенным возбудителем довольно проста и может применяться в том случае, если пусковые токи не вызывают падения напряжения в сети больше допустимого и статистический момент нагрузки Мс < 0,4 Мном. Асинхронный пуск синхронного двигателя производится присоединением статора к сети. Двигатель разгоняется как асинхронный до скорости вращения, близкой к синхронной. В процессе асинхронного пуска обмотка возбуждения замыкается на разрядное сопротивление, чтобы избежать пробоя обмотки возбуждения при пуске, так как при малой скорости ротора в ней могут возникнуть значительные перенапряжения. При скорости вращения, близкой к синхронной, срабатывает контактор КМ (рисунок 4, цепь питания контактора на схеме не показана), обмотка возбуждения отключается от разрядного сопротивления и подключается к якорю возбудителя. Пуск заканчивается.
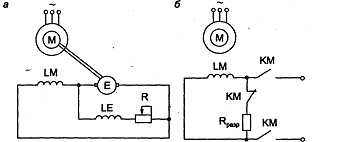
Рисунок 4. Типовые узлы схем возбуждения синхронного двигателя
Использование тиристорных возбудителей для пуска синхронных электродвигателей
Слабым местом большинства электроприводов с синхронными двигателям, значительно усложняющим эксплуатацию и повышающим затраты, многие годы являлся электромашинный возбудитель. В настоящее время широкое распространение для возбуждения синхронных двигателей находят тиристорные возбудители. Они поставляются в комплектном виде.
Тиристорные возбудители синхронных электродвигателей более надежны и имеют более высокий к.п.д. по сравнению с электромашинными возбудителями. С их помощью легко решаются вопросы оптимального регулирования тока возбуждения для поддержания постоянства cosf, напряжения на шинах, от которых питается синхронный двигатель, а также ограничение токов ротора и статора синхронного двигателя в аварийных режимах. Тиристорными возбудителями комплектуется большинство выпускаемых крупных синхронных электродвигателей. Они выполняют обычно следующие функции:
пуск синхронного двигателя с включенным в цепь обмотки возбуждения пусковым резистором,
бесконтакное отключение пускового резистора после окончания пуска синхронного двигателя и защиту его от перегрева,
автоматическую подачу возбуждения в нужный момент пуска синхронного электродвигателя,
автоматическое и ручное регулирование тока возбуждения
необходимую форсировку возбуждения при глубоких посадках напряжения на статоре и резких набросах нагрузки на валу синхронного двигателя,
быстрое гашение поля синхронного двигателя при необходимости снижения тока возбуждения и отключениях электродвигателя,
защиту ротора синхронного двигателя от длительной перегрузки по току и коротких замыканий.
Если пуск синхронного электродвигателя производится на пониженное напряжение, то при «легком» пуске возбуждение подается до включения обмотки статора на полное напряжение, а при «тяжелом» пуске подача возбуждения происходит при полном напряжении в цепи статора. Возможно подключение обмотки возбуждения двигателя к якорю возбудителя последовательно с разрядным сопротивлением.
Процесс подачи возбуждения синхронному двигателю автоматизируется двумя способами: в функции скорости и в функции тока. На схеме, приведенной на рисунке 5, подача возбуждения синхронному двигателю осуществляется с помощью электромагнитного реле постоянного тока КТ (реле времени с гильзой). Катушка реле включается на разрядное сопротивление Rразр через диод VD. При подключении обмотки статора к сети в обмотке возбуждения двигателя наводится ЭДС. По катушке реле КТ проходит выпрямленный ток, амплитуда и частота импульсов которого зависят от скольжения.
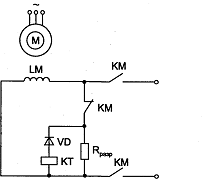
Рисунок 5. Подача возбуждения синхронному двигателю в функции скорости
При пуске скольжение S = 1. По мере разгона двигателя оно уменьшается и интервалы между выпрямленными полуволнами тока возрастают; магнитный поток постепенно снижается по кривой Ф(t). При скорости, близкой к синхронной, магнитный поток реле успевает достигнуть значения потока отпадания реле Фот в момент, когда через реле КТ ток не проходит. Реле теряет питание и своим контактом создает цепь питания контактора КМ (на схеме цепь питания контактора КМ не показана).