

Зміст пояснювальної записки
стор.
Зміст………………………………………………………………………………………………………………………………………………….. 2 .
Завдання……………………………………………………………………………………………………………………………………………. 3
Вступ……………………………………………………………………………………………………………………………………………………. 4
Вибір електродвигуна та кінематичний розрахунок передачі……………………………….. 5
Розрахунок пасової передачі……………………………………………………….…………………………………………… 7
Розрахунок конічної прямозубої передачі………………………………………………………………………… 10
Проектувальний розрахунок валів редуктора……………………………………………………………….. 15
Конструктивні розміри зубчастої пари……………………………………………………………………………. 17
Конструктивні розміри корпуса та кришки редуктора…………………………………………… 18
Перший етап ескізного компонування………………………………………………………………………………. 20
Підбір підшипників валів редуктора……………………………………………………………………………………... 22
Перевірний розрахунок веденого вала……………………………………………………………………………….. 28
Другий етап ескізного компонування………………………………………………………………………………… 33
Підбір і перевірний розрахунок муфти……………………………………………………………………………… 34
Підбір шпонок і перевірний розрахунок шпонкових з’єднань…………………………………. 35
Вибір посадок основних деталей редуктора………………………………………………………………….. 37
Вибір мастила зубчастого зачеплення і підшипників………………………………………………… 39
Порядок збирання редуктора…………………………………………………………………………………………………. 40
 Список
використаної
літератури………………………………………………………………………………………….. 41
Список
використаної
літератури………………………………………………………………………………………….. 41
Вступ
Машинобудуванню належить провідна роль серед інших галузей народного господарства, так як основні виробничі процеси виконують машини. Тому і технічний рівень усіх галузей народного господарства в значній мірі визначається рівнем розвитку машинобудування.
На основі розвитку машинобудування здійснюється комплексна механізація і автоматизація виробничих процесів промисловості, в будівництві, в сільському господарстві, на транспорті.
Перед машинобудівниками поставлена задача значного підвищення експлуатаційних і якісних показників продукції при неперервному зрості об’єму її випуску. Одним із напрямів розв’язання цієї задачі є удосконалення конструкторської підготовки машинобудівних спеціальностей.
Редуктором називається механізм, який складається з зубчастих або черв’ячних передач, виконаний у вигляді окремого агрегату і призначений для передачі обертання від вал двигуна до робочої машини. Редуктор призначений для зниження кутової швидкості, підвищення обертального моменту веденого валу в порівнянні з ведучим. Механізми для підвищення кутової швидкості, виконують у вигляді окремих агрегатів і називають мультиплікатором.
Редуктор
складається з корпусу (литого чавунного
або зварного стального), в якому розміщені
елементи передачі –
зубчасті колеса, вали, підшипники тощо.
У деяких випадках у корпусі редуктора
розміщують також пристрої для змащення
зачеплень і підшипників або пристроїв
для охолодження. 
1. Вибір електродвигуна та кінематичний розрахунок передачі
1.1. Визначаємо загальний механічний ККД приводу.
![]()
де η1 – ККД пасової передачі, η1 = 0,94÷0,96 (табл. 1.1 [2]), приймаємо , η1 = 0,95;
η2 – ККД конічного редуктора, η2 = 0,95÷0,97 (табл. 1.1 [2]), приймаємо , η1 = 0,96;
η3 – ККД пари підшипників, η3 = 0,99 (табл. 1.1 [2]),
тоді
η = 0,95 ·0,96 ·0,992 = 0,894
Рис.1 Кінематична схема приводу
1.2. Визначаємо необхідну потужність двигуна.
![]() кВт
кВт
1.3. Призначаємо передатні числа ступенів передачі.
За табл. 1.2 [2] для пасової передачі рекомендовано u1 = 2 ÷ 4, приймаємо u1 = 3, .для конічної передачі рекомендовано u2 = 1 ÷ 4, приймаємо враховуючи ГОСТ 21426-75
u2 = 3,15.
1.4. Визначаємо загальне передаточне число.
u = u1 · u2 = 3 ·3,15 = 9,45
1.5. Визначаємо орієнтовне значення частоти обертання електродвигуна.
nорієнт = n3 · u = 95 ·9,45 = 897,75 об/хв.
1.6. Вибираємо електродвигун.
За табл. 18.36 [2] приймаємо електродвигун типу 4А132S2, у якого nдв = 965 об/хв.; Рдв = 5,5 кВт.
1.7. Визначаємо загальне передатне число
![]()
1.8. Розбиваємо передатні числа по окремим передачам. За ГОСТ 21426-75 приймаємо для конічної передачі u2 = 3,15; тоді для пасової передачі
![]()
1.9. Визначаємо частоту обертання валів приводу.
n1 = nдв =965 об/хв.;
![]() об/хв.;
об/хв.;

![]() об/хв.;
об/хв.;
Розходження із завданим числом складає:
![]() %
< 2,5%
%
< 2,5%
1.10. Визначення потужності на валах приводу
Р1 = 5,03 кВт
Р2 = Р1 ·η1 ·η3 =5,03 ·0,95 ·0,99 = 4,73 кВт
Р3 = Р2 ·η2 ·η3 =4,73 ·0,96 ·0,99 = 4,5 кВт
1.10. Визначаємо обертальні моменти на валах приводу.
![]() ;
;
![]() ;
;
![]()
2. Розрахунок відкритої клинопасової передачі.
2.1. Із попередніх розрахунків:
обертальний момент на ведучому валу – Т1 = 49,8 Н·м;
частота обертання ведучого вала – n1 = 965 об/хв;
передатне число пасової передачі – u1 = 3,23;
потужність на валу – Р1 = 5,03 кВт
2.2. Визначаємо діаметри шківів:
ведучий шків: d1 = (3-4)
 = (3-4)
= (3-4)
 =110-147
мм
=110-147
мм
за ГОСТ 17383-73 стор. 120 [5], приймаємо d1 = 140 мм;
ведений шків: d2 = d1 · u1 · (1-ε),
де ε = 0,015 – коефіцієнт відносного ковзання пасу,
d2 = 140 · 3.23 · (1- 0,015) = 445,4 мм, приймаємо за ГОСТ 17883-73 стандартне значення d2 = 450 мм.
2.3. Вибір типу паса.
За номограмою рис. 7.3 [5] приймаємо тип пасу Б, для якого: d1 = не менше 125мм;
lp = 14,0мм; W = 17мм; TO = 10,5мм; A = 133мм2 ; LP = 800÷6300мм; ΔL = 40мм ; маса одного метру паса – 0,18 кг.

Рис.2 Переріз паса
2.4 Уточнюємо передаточне відношення:
![]()
2.5. Визначаємо міжосьову відстань:
amin = 0,55 (d1+d2) + TO = 0,55 (140+450) + 10,5 = 335 мм
amах = d1 + d2 = 140+450 = 590 мм
приймаємо а = 460 мм
2.6. Визначаємо необхідну довжину паса:
L
= 2a+0,5
π
(d1+d2)
+![]() 2·460
+ 0,5 ·
3,14(140 + 450) +
2·460
+ 0,5 ·
3,14(140 + 450) +
![]() =
=1898,5 мм
=
=1898,5 мм
Приймаємо за ГОСТ 12841-80 довжину паса L = 1900мм.
2.7. Уточнюємо міжосьову відстань:
a
= 0,25 [(L-W)
+
![]() ],
],
де W = 0,5 π (d1+d2) = 0,5· 3,14 (140+450) = 926,3мм,
y = (d2- d1)2 = (450-140)2 = 96100 мм, тоді
а = 0,25
[(1900
– 926,3)
+
![]() ]
= 460,78 мм.
]
= 460,78 мм.
2.8. Визначаємо кут обхвату меншого шківа:
α1
= 180 0
–
57 0
![]() = 180 0
–
57 0
= 180 0
–
57 0
![]() = 141,7 0
= 141,7 0
α1 =141,7 > [α1] = 120
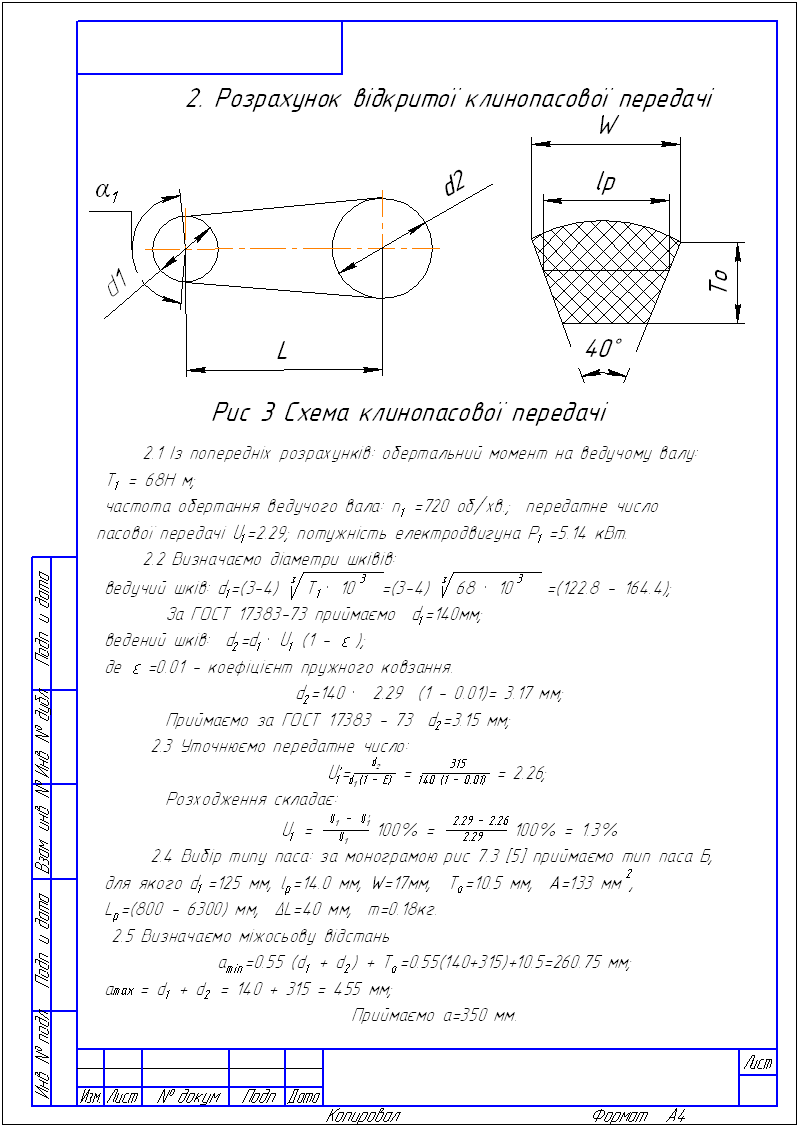
Рис. 3 Схема пасової передачі
2.9. Визначаємо необхідну кількість пасів.
z
=
![]() ;
;
де Р1 = 5,03 кВт – потужність на ведучому валу;
 Ро
–
найбільше допустиме навантаження, що
може передати один пас, за табл.7.8 [5],
приймаємо Ро
= 2,37 кВт;
Ро
–
найбільше допустиме навантаження, що
може передати один пас, за табл.7.8 [5],
приймаємо Ро
= 2,37 кВт;
Ср – коефіцієнт режиму роботи, за табл.7.10 [5], приймаємо Ср = 1,1;
СL – коефіцієнт, що враховує вплив довжини паса, за табл.7.9 [5], приймаємо СL = 0,98;
Сα – коефіцієнт, що враховує кут обхвату, стор. 135 [5], для α1 =141,7 приймаємо
Сα = 0,89;
СZ – коефіцієнт, що враховує кількість пасів, стор. 135[5], умовно приймаємо z = 2÷3
тоді СZ = 0,95;
z
=![]() ;
;
приймаємо z = 3.
2.10. Визначаємо швидкість паса.
![]() м/с
м/с
2.11. Визначаємо необхідний натяг одного паса.
![]() ;
;
де Ө – коефіцієнт, що враховує відцентрову силу стор. 136 [5], для пасу з перерізом Б приймаємо Ө= 0,18; тоді
![]() Н
Н
2.12. Визначаємо силу, що діє на вал
 Fв
= 2·F0·z·sin
(α1/2)
= 2
·252,2
·3
·
sin (141,7/2)
= 1429,5 Н
Fв
= 2·F0·z·sin
(α1/2)
= 2
·252,2
·3
·
sin (141,7/2)
= 1429,5 Н