

1.13. Проаналізувати чутливість датчиків зрівноважуючого типу. Див 1.10…….
1.14. Організація і планування випробувань датчиків.
На даний момент в Україні діє два нормативних документи, які
регламентують порядок та об’єм робіт при проведенні калібрування датчиків
вібрації та удару в: МИ 1873 [1] та ГОСТ 30652 [2]. МИ 1873 розроблено ще
в 1988 році, ця методика регламентує калібрування віброметрів та датчиків
вібрації. ГОСТ 30652-99 є адаптованим текстом міжнародного стандарту ISO
5347-3-93, і передбачає калібрування лише датчиків вібрації та удару.
Порівняно з МИ 1873-88, стандарт передбачає більш складну процедуру
проведення калібрування та іншу методику розрахунку похибки.
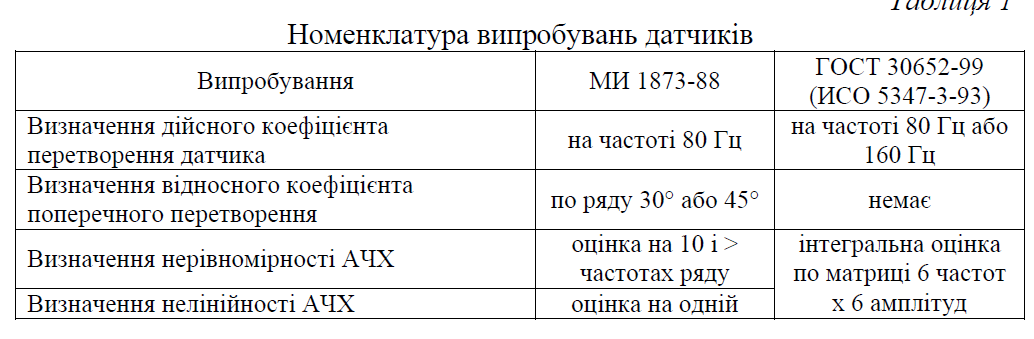
Номенклатура випробувань датчиків, які за діючими нормативними
документами підлягають проведенню на зразковій вібраційній установці,
вказана в табл. 1.

Загальна характеристика комплексу
Комплекс складається з комп’ютера, вимірювального модуля, що
об’єднує генератор та два вимірювальних канали, підсилювача потужності,
вібростенда та еталонного акселерометра, на який встановлюють робочий
акселерометр, що підлягає калібруванню (рис.1).
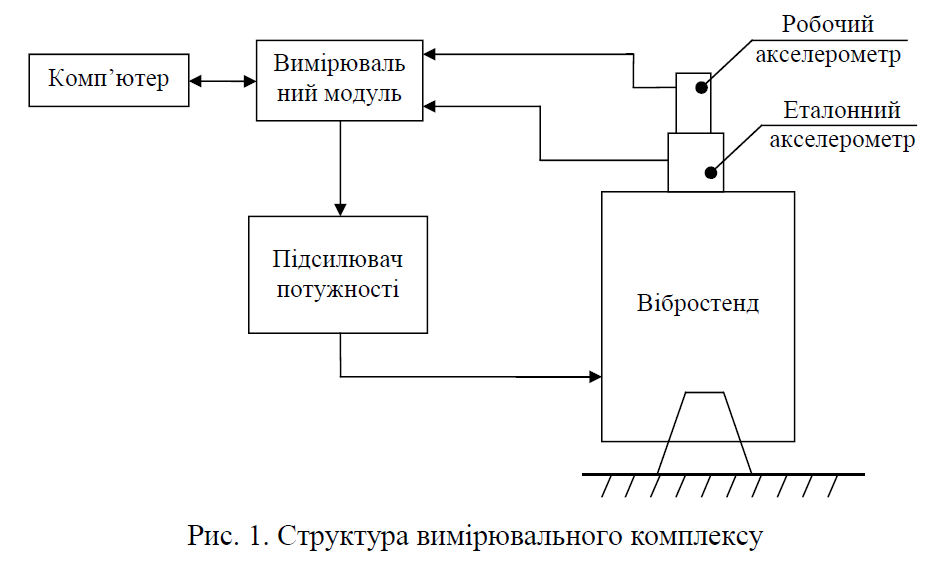
Комп’ютер забезпечує керування процесом випробувань за вибраною
методикою, обробку виміряних даних, визначення похибки, зберігання
результатів калібрування та їх документування. Сигнал збудження з
генератора, керованого комп’ютером (задаються форма, частота і амплітуда
сигналу) подається через підсилювач потужності на вібростенд, на столі
якого закріплені вібродатчики – еталонний та робочий. Сигнали з датчиків
подаються на входи вимірювальних каналів модуля. Ці сигнали після
підсилення і оцифровки передаються в комп’ютер для подальшої обробки
(наприклад, обчислення коефіцієнта чутливості та амплітудно-частотної
характеристики датчика). Крім того, сигнал еталонного датчика
використовується для підтримання стабільної за середньоквадратичним
значенням (СКЗ) або амплітудою коливань на робочій частоті величини
вібрації на столі вібростенда.
Розрахунок похибки калібрування датчика
Згідно МИ 1873-88, основна похибка датчика визначається за
формулою (за довірчої ймовірності 0,95):

де 0 - похибка зразкового засобу вимірювання (еталонній
акселерометр + вимірювальний канал); п Kпв Kвд - похибка, викликана
наявністю поперечного руху вібростола установки, де Kпв - коефіцієнт, що
характеризує поперечний рух вібростенда, Kвд - відносний коефіцієнт
поперечного перетворення робочого датчика; в - похибка вимірювального
приладу (вимірювальний канал, до якого підключено робочий датчик); -
значення нерівномірності АЧХ датчика в процентах, a max - максимальна
нелінійність амплітудної характеристики робочого датчика.
Згідно ГОСТ 30652-99 (ИСО 5347-3-93) загальна похибка
калібрування датчика визначається (за довірчої ймовірності 0,95) за
формулою: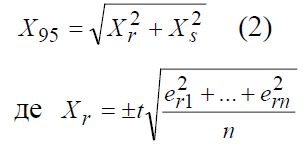
випадкова похибка вимірювання, n - число
вимірювань, eri - i-те відхилення від середнього арифметичного значення
результатів одиничних вимірювань, t – коефіцієнт Стьюдента для
встановленої довірчої ймовірності і числа вимірювань; X s - невиключена
систематична похибка.
Невиключену систематичну похибку розраховують за формулою
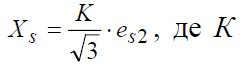
абсолютна похибка коефіцієнта перетворення
каліброваного датчика на частотах калібрування, амплітудах і коефіцієнті
перетворення підсилювача. Сама відносна похибка s2 es2 / S2
розраховується за формулою, що є коренем квадратним з суми квадратів
похибок від різноманітних факторів [2]:

чутливість еталонного датчика; T2 - відносна поперечна чутливість робочого
датчика; aп - СКЗ прискорення фону і шуму.
Загальну відносну похибку еталонного датчика і підсилювача за
межами базової та еталонної частот обчислюють за аналогічною (3)
формулою [2].
В загальному випадку розрахунок похибки за ГОСТ є достатньо
складною процедурою. Внаслідок цього розрахунок похибки калібрування за
заданими користувачем даними датчиків та умовами випробувань покладено
на вимірювальний комплекс.
1.15. Дати конструктивну оцінку вузлам, що захищають датчики від впливу зовнішніх факторів.?????????????
1.16. Використання механічних та акустичних фільтрів в датчиках тиску.
1.17. Способи захисту датчикової апаратури від теплових потоків.
1.18. Показати конструкцію датчика як ланцюг вимірювальних перетворень.
Засіб вимірювань (СІ) - технічний засіб, призначений для вимірювань, що має нормовані метрологічні характеристики, відтворює або зберігає одиницю фізичної величини, розмір якої приймають незмінною протягом відомого інтервалу часу.
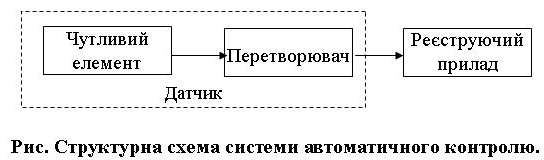
Вимірювальний перетворювач — елемент системи автоматичного контролю (див. рис.).
На відміну від вимірювального приладу, сигнал на виході вимірювального перетворювача (вихідна величина) безпосередньо не сприймається спостерігачем. Обов'язкова умова вимірювального перетворення — збереження у вихідному сигналі інформації про кількісне значення вимірюваної величини через забезпечення функціональної залежності (переважно, лінійної) між вимірюваною величиною та сигналом на виході.
У структурі давача зазвичай виділяють вимірювальний перетворювач, що безпосередньо пов'язаний з вимірюваною величиною. Первинним вимірювальним перетворювачем, або чутливим елементом, називається перетворювач, який першим взаємодіє з об'єктом вимірювання[1] і видає сигнал вимірювальної інформації. Первинний вимірювальний перетворювач у значній мірі визначає основні технічні характеристики давача.
Основні характеристики вимірювальних перетворювачів:
номінальна статична характеристика перетворення (градуювальна характеристика) — залежність між інформативними параметрами вхідного і вихідного сигналів;
коефіцієнт перетворення — коефіцієнт пропорційності лінійної залежності вхідного і вихідного сигналів;
чутливість — відношення приросту вихідного сигналу до відповідного йому приросту вхідного сигналу (для випадку лінійної залежності чутливість збігається з коефіцієнтом перетворення);
діапазон вимірювань — різниця граничних величин, що обмежують діапазон вимірюваної величини у якому робота вимірювального перетворювача задовольняє поставленим вимогам. В акустиці, оптиці та деяких інших областях використовується термін динамічний діапазон, що визначається виразом:
![]()
де:
![]() —
кінцеве значення діапазону, що визначається
допустимим значенням нелінійних
спотворень;
—
кінцеве значення діапазону, що визначається
допустимим значенням нелінійних
спотворень;
![]() —
початкове значення діапазону, що удвічі
перевищує рівень власних шумів.
—
початкове значення діапазону, що удвічі
перевищує рівень власних шумів.
похибка вимірювального перетворення — відхилення результату вимірювання від істинного значення вимірюваної величини.
Вимірювальний перетворювач (ІП) - технічний засіб з нормативними метрологічними характеристиками, що служить для перетворення вимірюваної величини в іншу величину або вимірювальний сигнал, зручний для обробки, зберігання, індикації або передачі. Вимірювальна інформація на виході ИП, як правило, недоступна для безпосереднього сприйняття спостерігачем. Хоча ІП є конструктивно відокремленими елементами, вони найчастіше входять в якості складових частин у більш складні вимірювальні прилади чи встановлення і самостійного значення при проведенні вимірів не мають.
Перетворюються величина, яка надходить на вимірювальний перетворювач, називається вхідний, а результат перетворення - вихідний величиною. Співвідношення між ними задається функцією перетворення, яка є його основною метрологічної характеристикою. Для безпосереднього відтворення вимірюваної величини служать первинні перетворювачі, на які безпосередньо впливає вимірювана величина і в яких відбувається трансформація вимірюваної величини для її подальшого перетворення або індикації. Прикладом первинного перетворювача є термопара в ланцюзі термоелектричного термометра. Одним з видів первинного перетворювача є датчик - конструктивно відокремлений первинний перетворювач, від якого надходять вимірювальні сигнали (він «дає» інформацію). Датчик може бути винесений на значну відстань від засобу вимірювань, яка приймає його сигнали. Наприклад, датчик метеорологічного зонда. У галузі вимірювань іонізуючих випромінювань датчиком часто називають детектор.
Засоби вимірювання прямого перетворення в статичному режимі.
 Рисунок
1 - Структурна схема засобу вимірювань
прямого перетворення.
Рисунок
1 - Структурна схема засобу вимірювань
прямого перетворення.
х — вхідний сигнал, несучий інформацію про вимірювану величину;
П1, П2, ... , Пn — ланки; х1, •••• xn-1 — проміжні сигнали; xn— вихідний сигнал.
Як видно з рисунка 1, вхідний сигнал х послідовно зазнає декілька перетворень і зрештою на виході виходить сигнал xn.
Для вимірювального приладу сигнал xn виходить у формі, доступній для безпосереднього сприйняття спостерігачем, наприклад у вигляді відхилення покажчика відлікового пристрою.
Для вимірювального перетворювача сигнал xn виходить у формі, зручній для передачі, подальшого перетворення, обробки і (або) зберігання.
Прикладом приладу електровимірювання, що має структурну схему прямого перетворення, може бути амперметр для вимірювання великих постійних струмів. У схемі цього приладу вимірюваний струм спочатку за допомогою шунта перетвориться в падіння напруги на шунті, потім в малий струм, який вимірюється вимірювальним механізмом, тобто перетвориться у відхилення покажчика.