

Грамагин Е.А. ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЯЗРИ ПВО ОГЛАВЛЕНИЕ. 1.Принципы построения и математическое моделирование САУ. 1.1.Управление в технических системах. 1.1.1. Понятие системы автоматического управления. 1.1.2.Общие принципы организации управления и системной организации. 1.2. Классификация САУ. 1.2.1.Классификация САУ по принципам управления. 1.2.2. Классификация САУ по виду их математических моделей. 1.2.3. Классификация САУ по целевому назначению и другим признакам. 1.3. Математические модели САУ. Формы представления моделей. 1.3.1. Математическое описание САУ. 1.3.2. Передаточные функции. 1.3.3. Формы представления моделей. 1.4. Структурные схемы САУ. 1.4.1.Типовые звенья. 1.4.2. Структурные схемы и передаточные формы САУ. 1.4.3.Многосвязные и многомерные системы. 1.4.4. Многоуровневые иерархические системы. 1.5. Основные характеристики типовых звеньев и САУ. 1.5.1.Временные характеристики. 1.5.2. Частотные характеристики. 1.5.3. Управляемость и наблюдаемость САУ. 2.Методы анализа и синтеза САУ. 2.1.Методы анализа САУ. 2.1.1.Понятие устойчивости. Анализ устойчивости САУ. 2.1.2.Алгебраический критерий устойчивости. 2.1.3.Частотный критерий устойчивости. 2.1.4.Логарифмический критерий устойчивости. Запасы устойчивости. 2.1.5.Запасы устойчивости САУ по амплитуде и фазе. 2.2.Оценка качества САУ. 2.2.1.Режимы работы САУ. 2.2.2. Оценка качества переходного режима по переходной характеристике. 2.2.3.Интегральный квадратичный критерий качества переходного режима. 2.2.4.Системы управления при случайных воздействиях. Характеристики воздействий. 2.2.5.Характеристики выходного случайного процесса. Стационарные формирующие фильтры. 2.2.6.Статистический анализ точности. 2.2.7. Параметрическая оптимизация. 2.3.Анализ типовых структур САУ. 2.3.1. Инвариантность систем управления. 2.3.2.Понятие чувствительности. 2.3.3.Нестационарные системы управления и их математические модели Заключение. Приложение. Список литературы. |
1.1. Управление в технических системах
1.1.1. Понятие системы автоматического управления
В настоящем курсе в качестве объектов управления (ОУ) рассматриваются технические устройства. Вопросами управления техническими системами занимается техническая кибернетика.
Управление без участия человека называется автоматическим, а системы, осуществляющие это управление, – системами автоматического управления (САУ). Та часть технической кибернетики, которая занимается изучением САУ, называется теорией автоматического управления (ТАУ).
Появление САУ обусловлено возрастающими требованиями к качеству управления, например его быстродействию, точности и тому подобное. Человек в силу своих ограниченных физических, психологических и других возможностей уже не в состоянии обеспечить ход процесса управления с высоким качеством. Переход к автоматическим системам особенно наглядно проявляется в области военной техники. Без преувеличения можно сказать, что автоматизация подняла военное дело на новый качественный уровень. Влияние автоматизации наглядно видно на примере войск ПВО, где применение зенитных ракетных комплексов, сверхзвуковых истребителей перехватчиков и другой техники немыслимо без самого широкого использования автоматических систем, которые являются надежными помощниками в управлении этими средствами.
Под системой автоматического управления понимают такую динамическую систему, в которой для достижения заданной цели управления производится сбор, передача и переработка различных потоков информации по заданным алгоритмам.
1.1.2. Общие принципы организации управления и системной организации
Структуру и общие принципы организации управления в технических системах покажем на примере системы наведения на цель зенитной ракеты, изображенной на рис. 1. В состав системы входят: многофункциональный радиолокатор, который содержит радиолокационную станцию слежения за целью(РЛСЦ), радиолокационную станцию слежения за ракетой (РЛСР), устройство выработки команд управления полетом (УВК) и передачи их на борт ракеты; пусковые установки (ПУ).
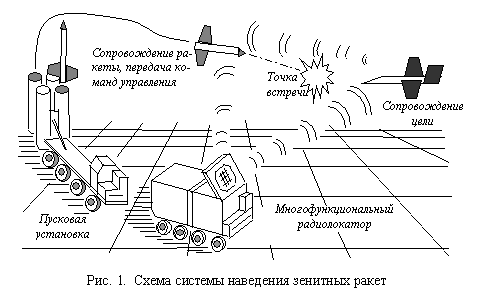
Работа системы сводится к управлению полетом ракеты (Р) так, чтобы она поразила цель. Ракета в такой системе является устройством, которое называется объектом управления (ОУ). Результаты управления оцениваются по значениям текущих координат ракеты (дальности, угловых координат, скорости), которые будем называть выходными координатами и обозначать функцией у(t). В результате управления в некоторый момент времени, называемый моментом встречи, координаты ракеты должны совпасть с координатами цели, на которую ракета наводится. Чтобы это произошло, координаты цели должны непрерывно измеряться с помощью РЛСЦ и использоваться для организации управления полетом ракеты. Измеряемые координаты называются задающими воздействиями и обозначаются функциейx(t). Для управления объектом (ракетой) на его вход по каналу связи подаются управляющие воздействияu(t) из устройства выработки команд, которые формируются на основе информации о задающем воздействииx(t), поступающей с РЛСЦ. Однако этой информации для организации управления с хорошим качеством бывает недостаточно, поэтому при формировании управляющих воздействий надо учитывать выходные координатыy(t) объекта управления, которые измеряются с помощью РЛСР и подаются в УВК. На основе сравнения координат целиx(t) и координат ракетыy(t)вырабатывается управляющее воздействие u(t), изменяющее траекторию полета так, чтобы произошла встреча ракеты с целью.
Описанную систему можно изобразить в укрупненном виде с помощью блок-схемы, показанной на рис.2, где ОУ – объект управления (ракета), УУ – управляющее устройство (УВК, РЛСЦ, РЛСР), УОС – устройство обратной связи, благодаря которому информация о ходе управления подается в управляющее устройство.
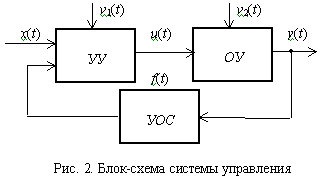
На рисунке дополнительно показаны возмущающие воздействияv1(t) иv2(t), которые отображают влияние внешних условий на работу системы: неоднородности атмосферы, влияющей на условия полета, наличие шумов в приемных устройствах РЛС; возможность постановки помех с цели и ряд других. Возмущающие воздействия нарушают ход процесса управления и ухудшают его качество.
Хотя блок-схема, приведенная на рис. 2, составлена на конкретном примере, она имеет общий характер и справедлива для всех технических систем управления. Нужно отметить, что в некоторых технических системах в организации управления участвует человек. Так, в рассмотренной системе наведения ракет имеются операторы РЛС, участвующие в работе по обнаружению целей; операторы УВК, производящие оценку воздушной обстановки, выбор целей для обстрела, выбор момента пуска ракет и т.д. Наличие человека в таких системах повышает их надежность и гибкость управления. В то же время имеется и ряд технических устройств, работающих без участия человека, то есть автоматически. К ним относятся: системы измерения координат цели и ракеты; системы управления антеннами и пусковыми установками; системы автоматического пилотирования и другие. Наличие автоматических устройств повышает точность, быстродействие и пропускную способность системы.
Дальнейшее развитие технических систем в первую очередь связано с повышением степени автоматизации процессов управления, что требует дальнейшего совершенствования методов описания, оценки качества и проектирования автоматических систем, изучаемых теорией автоматического управления. В методологии ТАУ четко прослеживается общая концепция теории познания: составление абстрактной модели по результатам наблюдения за поведением реальной системы; исследование модели и получение некоторых выводов о характере и качестве ее работы; внедрение полученных выводов в практику дальнейшей работы. Последующее изложение опирается на эту концепцию и построено по следующей схеме: рассматриваются математические модели САУ и способы их описания; изучаются основные методы анализа и синтеза систем; обосновываются способы повышения качества управления, зарекомендовавшие себя на практике. Подобную последовательность удается выдержать лишь при условии четкой классификации задач управления по ряду основных признаков. Эти признаки позволяют объединить разнообразные системы в несколько классов, обладающих едиными математическими моделями, и для каждого из классов в отдельности разработать специальные методы исследования. Поэтому изложение основ теории автоматического управления начнем с вопросов классификации САУ.
1.2. Классификация САУ