

Задания для самостоятельной работы
Для того, чтобы усовершенствовать ум,
надо больше размышлять,
чем заучивать.
Декарт

 В
копилку
В
копилку
Советы решающим задачи (окончание) методов
19. Не бойтесь делать к задаче несколько рисунков особенно, если нужные мысли не появляются.
20. При решении задачи не обязательно логически обосновывать каждый шаг (к этому вернетесь позже). Используйте интуицию и аналогию.
21. « Чтобы изобретать надо думать около » (Сурье).
22. Попробуйте рассмотреть изучаемый объект как часть целого, или как предельный случай чего-либо известного.
6.1. Найдите минимальное число звеньев и постройте структурную схему манипулятора, обеспечивающего перемещение объекта в пространстве вдоль осей x, y, z и его ориентацию (повороты вокруг осей x, y, z), с использованием только одноподвижных пар, три из которых–поступательные.
6.2. Определите минимальное число звеньев и кинематических пар и изобразите структурную схему шарнирного механизма с замкнутой кинематической цепью при следующих условиях: W = 1, q = 0, все пары–вращательные. Сравните полученный механизм с шарнирными четырехзвенниками и объясните возможность существования последних.
6.3. Спроектируйте самоустанавливающийся плоский зубчато–рычажный механизм (рис.6.3, б).
6.4. Используя метод наслоения структурных групп, найдите структурную схему плоского и пространственного кулисного механизма.
6.5. Спроектируйте самоустанавливающийся плоский трехзвенный кулачковый механизм с тарельчатым (плоским) толкателем, преобразующий вращательное движение кулачка в возвратно-поступательное движение толкателя.
6.6. Выведите структурную формулу для плоских клиновых механизмов, звенья которых не могут совершать вращательные движения, так как входят только в поступательные пары. Используя эту формулу, постройте структурную схему клинового механизма с минимальным числом звеньев, у которого W = 2.
6.7. Сформулируйте признаки структурной группы в клиновом механизме. Что общего и в чем принципиальное различие структурных групп в трехзвенных зубчатом и клиновом механизмах? Используя принцип расчленения механизма на структурные группы, проверьте решение предыдущей задачи.
6.8. Образовать механизм можно не только путем слияния звеньев и пар элементарных механизмов (см.п.4.4), но и соединением элементарных механизмов с помощью дополнительных кинематических пар и звеньев. Так , два шарнирных четырехзвенника 1278 и 1345 (рис.5.13, б) присоединены шарнирами А и В к промежуточному звену 6. Объясните, почему число степеней свободы такого составного механизма можно определить по формуле (8), полученной для другого способа соединения?
6.9. Какая связь и почему будет между подвижностями составного и элементарных механизмов, если последние соединить:
а) с помощью неподвижных соединений к промежуточному звену?
б) одноподвижной или двухподвижной плоской кинематической парой?
в) структурной группой из двух звеньев?
Предложите вместо равенства (8) более общую формулу, учитывающую разные виды соединений элементарных механизмов.
6.10. Предложите еще одну структурную модель механизма второго уровня.
6.11. От чего зависят основные свойства механизма? Причинно–следственные отношения следует установить, рассматривая три уровня глубины проблемы.
6.12. Предложите свой вариант вывода формулы (3) из формулы (2).
6.13. Предложите структурную схему плоского рычажного механизма переменной структуры на базе кривошипно-ползунного механизма.
6.14. Предложите схему плоского самоустанавливающегося механизма шарнирного четырехзвенника с разгрузочными звеньями.
6.15. что представляет собой стержневая система (рис.6.11), если оси аа и вв вращательных пар параллельны, а ось сс цилиндрической пары D не параллельна осям аа и вв?
Кинематически неизменяемая система.
Пространственный механизм.
Плоский несамоустанавливающийся механизм.
Плоский самоустанавливающийся механизм.
6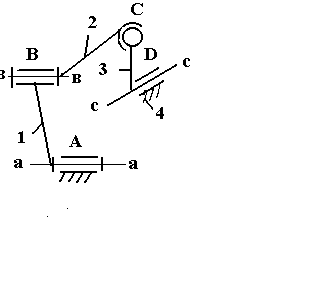 .16.
Чем станет стержневая система (рис.6.11),
если ось сс цилиндрической пары D
выполнить параллельной осям аа и вв?
.16.
Чем станет стержневая система (рис.6.11),
если ось сс цилиндрической пары D
выполнить параллельной осям аа и вв?
6.17. Чем станет стержневая система (рис.6.11), если цилиндрическую пару D заменить вращательной, у которой ось сс не параллельна осям аа и вв?
6.18. Чем станет стержневая система (рис.6.11), если цилиндрическую пару D заменить вращательной, у которой ось сс параллельна осям аа и вв?
Рис.
6.11. Схема
стержневой системы

Определите коэффициент качества обучения по формуле
К6 = m/18*100% = … .
Конспект – план главы 6
