

6.8. Передаточная функция Феx(p) замкнутой аср по ошибке, обусловленной заданием
Точность слежения, т. е. точность поддержания выходной величины объекта равной заданию, является одной из важнейших характеристик АСР, определяющих ее качество. Выходной сигнал сумматора типовой АСР представляет собой ошибку регулирования e(t), которая может меняться с течением времени. Структурную схему можно изменить сделав выходом выход сумматора, при этом все элементы контура окажутся в звене обратной связи (рис. 6.12).
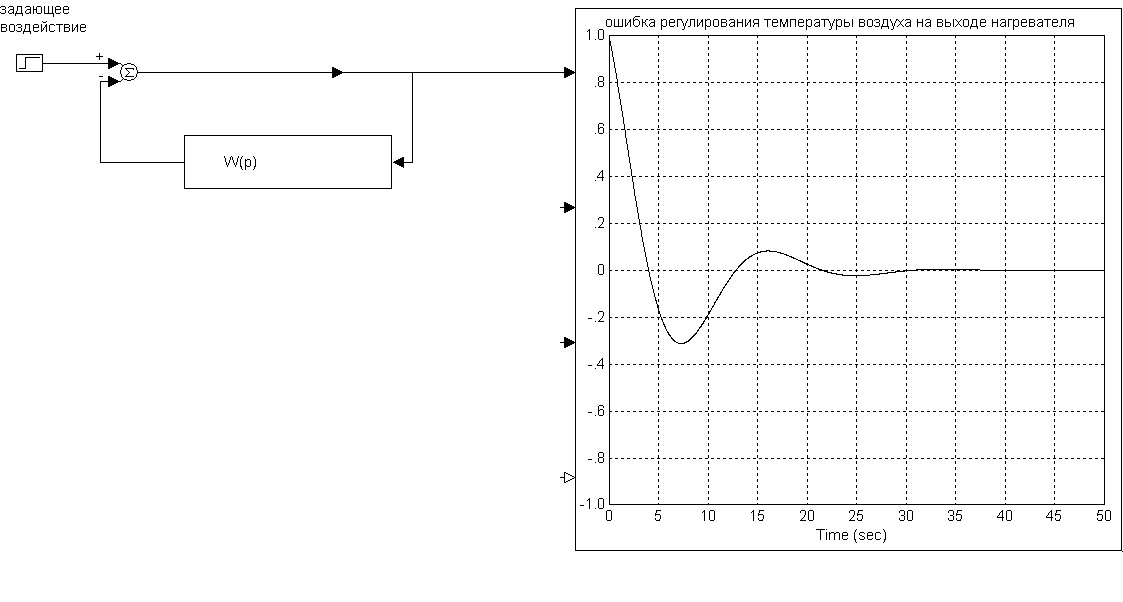
Рис. 6.12. Структурная схема типовой АСР, приведенная к виду, в котором выходным сигналом является ошибка регулирования е = х – у. С течением времени ошибка
Регулирования стремится к нулю вследствие работы аср
Передаточная функция замкнутой АСР по ошибке, обусловленной заданием, как следует из правила 3, равна:
 .
.
6.9. Передаточная функция Фf(p) замкнутой аср по возмущению
В типовой АСР совокупность возмущающих воздействий на объект управления, препятствующих его правильному поведению, приводится ко входу объекта (рис. 6.13).
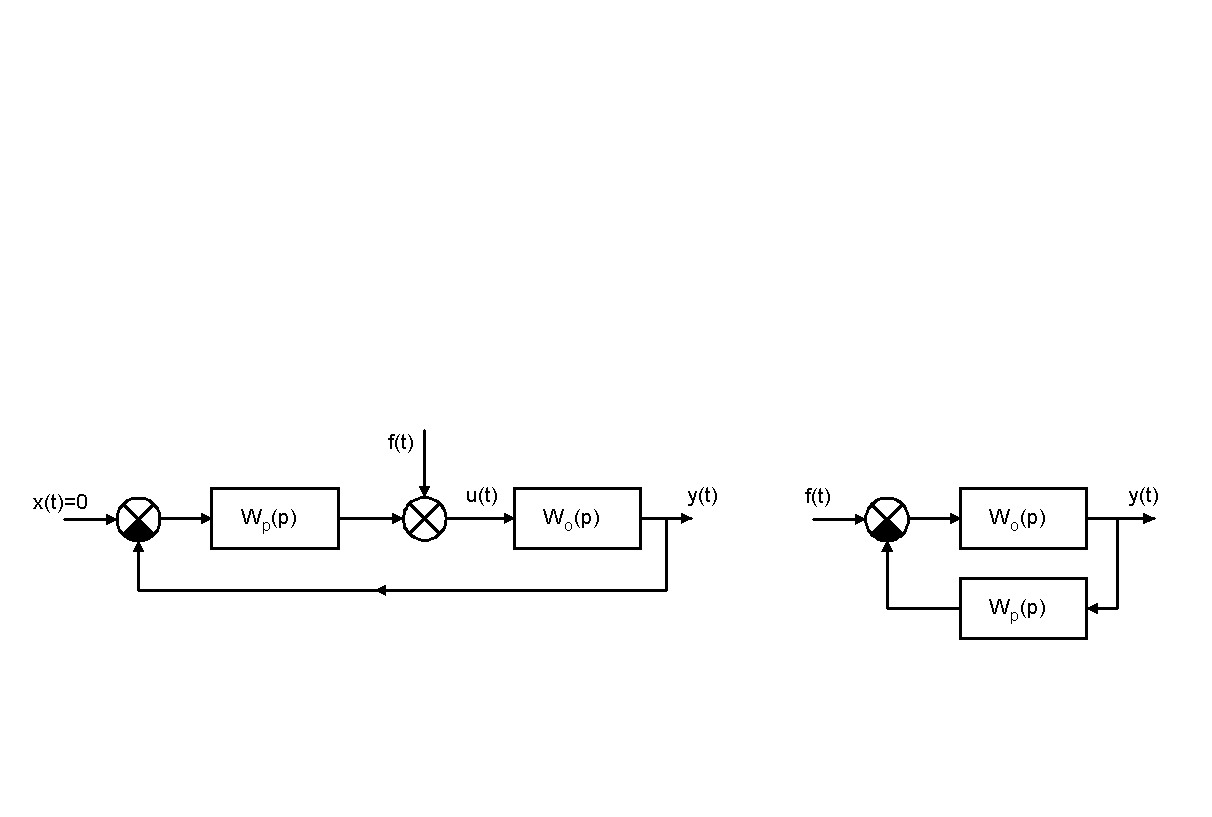
Рис. 6.13. Схема типовой АСР с указанием места приложения возмущения,
а также схема этой АСР, где задание равно нулю,
а входным сигналом является возмущение
Передаточная функция замкнутой АСР по возмущению с учетом второй схемы (см. рис. 6.13) и правила 3 равна:
 .
.
Зная передаточные функции, рассмотренные выше, можно вычислить, как задание и возмущение влияют на управляемую величину (рис. 6.14).
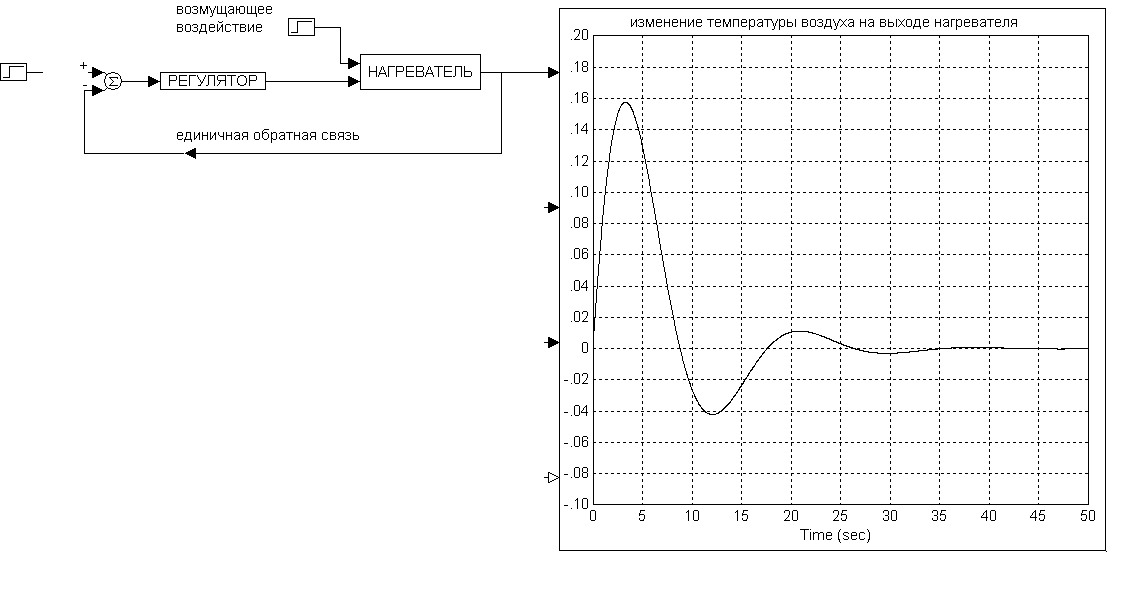
Рис. 6.14. Действие АСР компенсирует влияние единичного ступенчатого
возмущения на объект управления
Кроме того, эти передаточные функции, прежде всего W(p) и Фx(p), позволяют прямо и косвенно оценить качество АСР.
6.10. Уравнения динамики и статики типовой аср
Эти уравнения описывают реакцию АСР на одновременное действие и задания, и возмущения. Описание основывается на реализации принципа суперпозиции, справедливого для линейных систем. Уравнение динамики типовой АСР в операторной форме имеет вид:
![]() ,
,
для выходного сигнала АСР и
![]()
для ошибки регулирования.
На рисунке 6.15 видно, что в нулевой момент времени задание меняется с нулевого на 20 °С и АСР за 100 с приводит управляемую величину (выходную величину объекта управления) к установившемуся значению по уровню равному заданию.
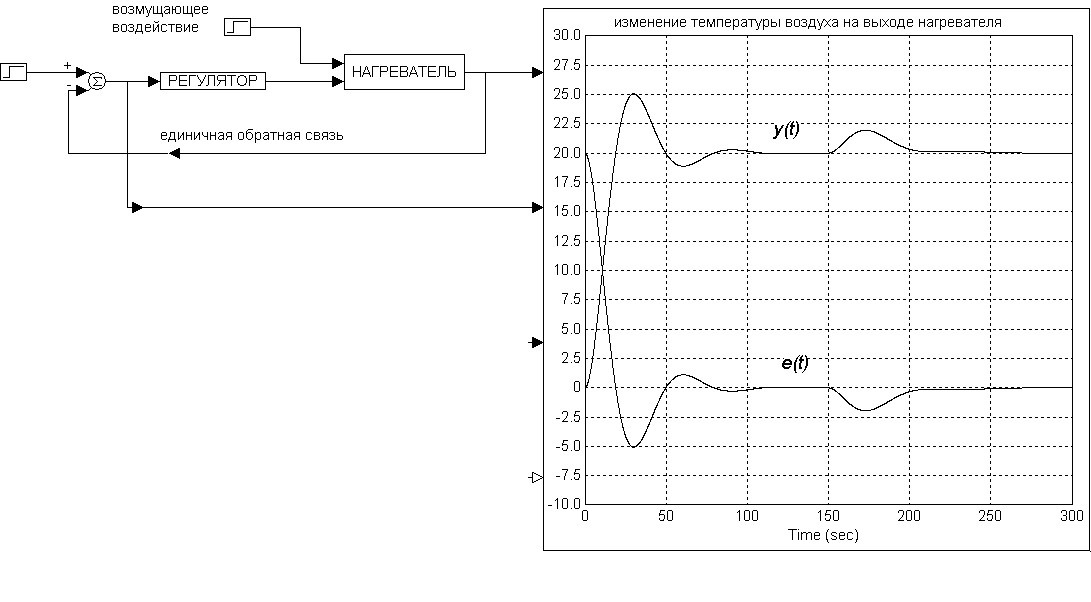
Рис. 6.15. Совместное воздействие на АСР задания и возмущения в виде ступенчатых функций. АСР осуществляет слежение за заданием и стабилизацию,
т. е. компенсирует влияние возмущения на управляемую величину
Тем самым подтверждается, что АСР осуществляет слежение за заданием. Через 150 с после подачи ступенчатого задания на АСР поступает ступенчатое возмущение величиной 10 °С ( за счет изменения температуры воздуха на входе в нагреватель). Это приводит к появлению ошибки регулирования, которую АСР за 50 секунд компенсирует. Следовательно, АСР осуществляет стабилизацию.
7. Типовые законы регулирования
Законом регулирования называется математическая зависимость, в соответствии с которой управляющее воздействие на объект вырабатывалось бы безынерционным регулятором.
Простейшим из них является пропорциональный закон регулирования, при котором u(t) = kПe(t), где u(t) – это управляющее воздействие, формируемое регулятором; e(t) – отклонение регулируемой величины от требуемого значения; kП – коэффициент пропорциональности регулятора.
Передаточная функция пропорционального регулятора имеет вид
WП (p) = kП ,
т. е. пропорциональный регулятор представляет собой усилительное звено.
Для создания управляющего воздействия необходимо наличие ошибки регулирования и чтобы величина этой ошибки была пропорциональна возмущающему воздействию. Другими словами, АСР в целом должна быть статической. Такие регуляторы называют П-регуляторами.
Величину ошибки регулятора в статическом режиме можно получить, если принять p = 0 в уравнении
![]() .
.
 .
.
Из уравнений следует, что в установившемся режиме при действии на входе постоянных величин ошибка e тем меньше, чем больше kП.
Рассмотрим в качестве примера пропорциональный регулятор температуры.
В зависимости от разности между заданной температурой (уставкой) и измеренным значением температуры на выходе регулятора формируется регулирующее воздействие. Выходным сигналом регулятора может быть электрическое напряжение определенного диапазона (стандартный промышленный диапазон – от 0 до 10 В), ток в диапазоне от 0 до 20 мА и т. д. Диапазон возможного изменения выходного сигнала ΔU называется диапазоном регулирования. Диапазон изменения сигнала ошибки, при котором выходной сигнал регулятора изменяется в пределах диапазона регулирования, называется диапазоном пропорциональности или зоной пропорциональности ХП. Обычно в регуляторах предусматривается возможность регулирования величины ХП. Из графика (рис. 7.1) видно, что чем меньше диапазон пропорциональности, тем круче идет характеристика регулятора. Максимальная величина сигнала на выходе пропорционального регулятора будет при максимальной величине ошибки. Чем меньше ХП, тем меньше величина ошибки.
Коэффициент пропорциональности пропорционального регулятора:
![]() .
.
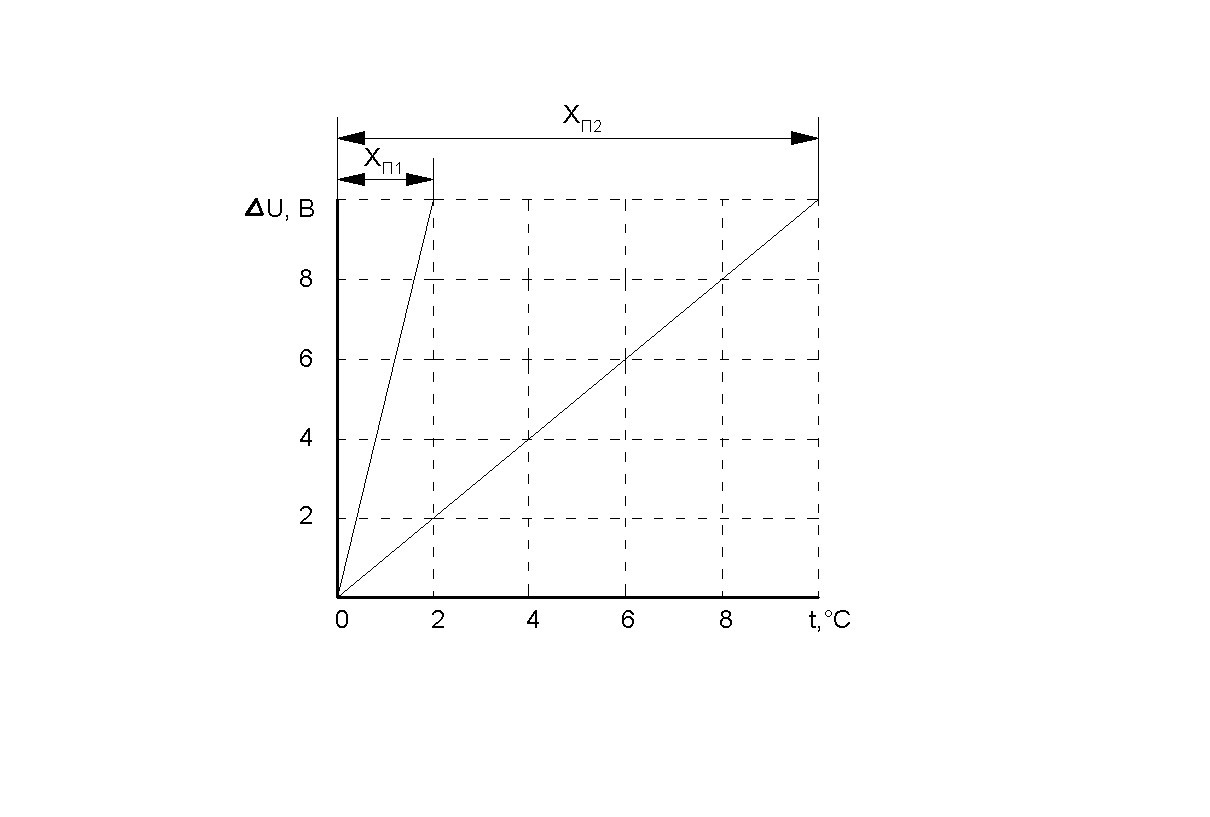
Рис. 7.1. График пропорционального регулирования
На рисунке 7.2 приведен пример АСР с П-регулятором. В качестве объекта управления используется трубчатый электрический воздухоподогреватель (ТЭН) приточной вентиляционной установки с датчиком температуры воздуха после подогревателя. Воздухоподогреватель с достаточной точностью может быть смоделирован инерционным звеном первого порядка. Динамические свойства датчика температуры приточного воздуха также моделируются апериодическим звеном. Регулирование температуры осуществляется за счет изменения электрической мощности, подаваемой на ТЭН.
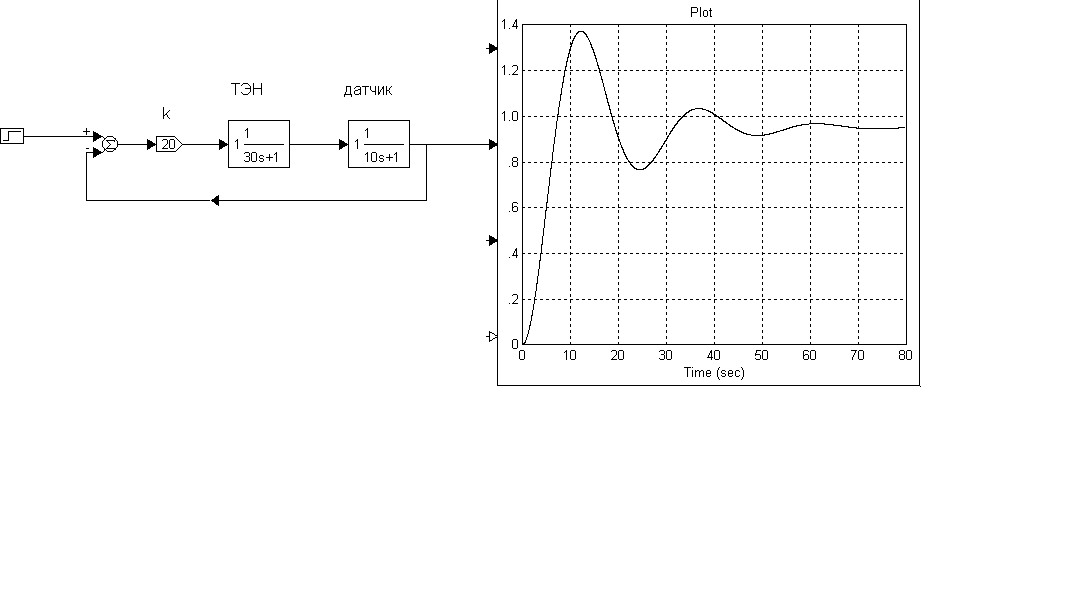
Рис. 7.2. Переходный процесс при регулировании П-регулятором
Предположим, что в начальный момент времени произошло изменение уставки по температуре приточного воздуха от нуля до некоторого значения ( на графике температура уставки соответствует значению 1 в относительных величинах). Поскольку при этом произойдет резкое изменение величины ошибки, то характер изменения e(t) будет соответствовать ступенчатому воздействию. Пропорционально возрастёт величина сигнала на выходе регулятора и величина электрической мощности, подаваемой на ТЭН. Примерно через восемь секунд температура воздуха на выходе нагревателя увеличится до величины уставки и сигнал на выходе регулятора станет равным нулю. Однако, из-за того что ТЭН разогрет, температура будет продолжать возрастать ещё пяти секунд, а затем начнет понижаться. Процесс регулирования имеет вид затухающих колебаний и примерно через 70 секунд стабилизируется. Из графика видно, что статическая ошибка составляет примерно 5 % от величины уставки.
Так как при воздействии возмущения на объект управления отклонение регулируемой величины от требуемого значения происходит с конечной скоростью, то в начальный момент на вход регулятора подается малая величина e, вызывая при этом слабые управляющие воздействия u.
Для повышения быстродействия системы желательно форсировать процесс управления. Для этого в регулятор вводят звенья, формирующие на выходе сигнал, пропорциональный производной от входной величины, то есть дифференцирующие или форсирующие звенья. Такой закон регулирования называется пропорционально-дифференциальным:
![]() .
.
В соответствии с ним работают ПД-регуляторы.
Обычно вместо коэффициента передачи kД используется параметр ТД – постоянная времени дифференцирования.
Передаточная функция пропорционально-дифференциального регулятора имеет вид:
![]()
Чем быстрее нарастает отклонение регулируемой величины от требуемого значения, тем интенсивнее работает ПД-регулятор, что препятствует дальнейшему нарастанию данного отклонения. Кроме того, при увеличении отклонения (de(t)/dt > 0) управляющий сигнал u будет больше, чем при уменьшении (de(t)/dt < 0), что также играет положительную роль, т. к. снижает колебательность процесса управления.
Структурная схема рассмотренного ПД-регулятора показана на рисунке 7.3, а. Такой регулятор имеет независимые друг от друга параметры настройки kП и ТД. На рисунке 7.3, б представлена структурная схема ПД-регулятора с общим коэффициентом передачи kП. Такая схема регулятора называется схемой со связанными настройками. В этом случае закон ПД-регулирования имеет вид
![]() ,
,
где τП – постоянная времени предварения.
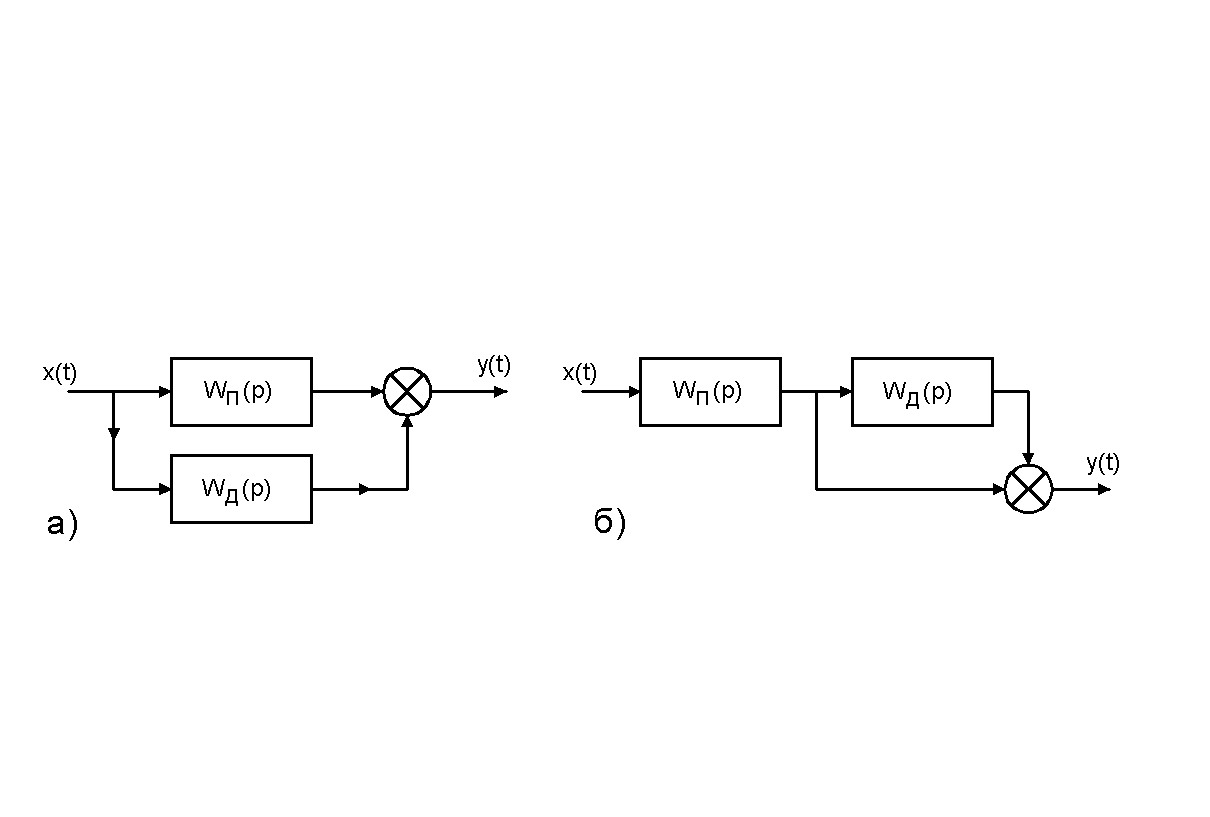
Рис. 7.3. Структурные схемы ПД-регуляторов
Передаточная функция регулятора имеет вид:
![]()
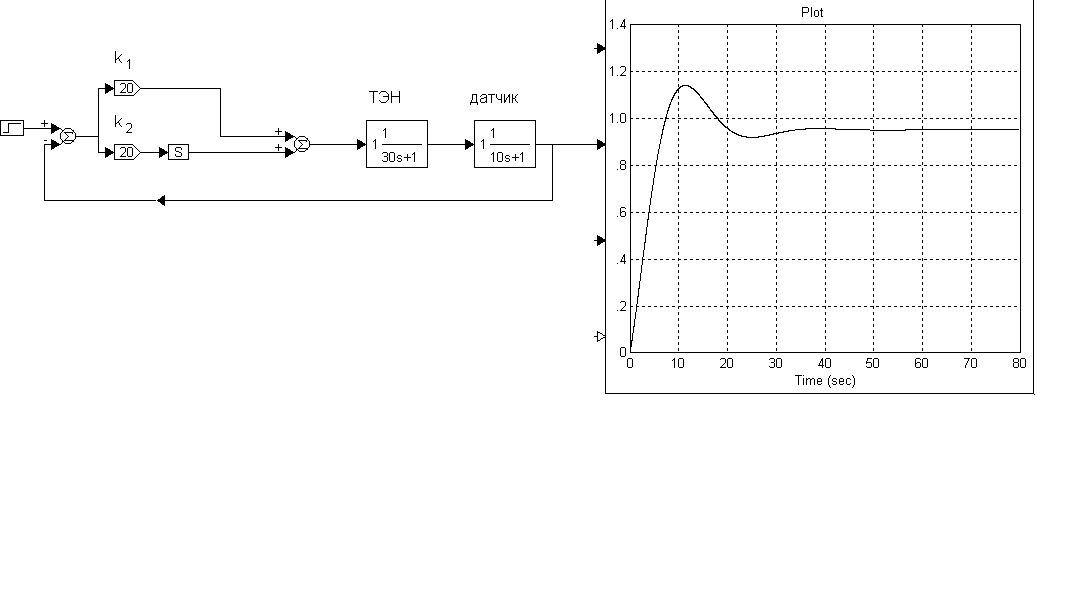
Рис. 7.4. Переходный процесс при регулировании ПД-регулятором
Сравнение рисунков 7.2 и 7.4 показывает, что ПД-регулятор имеет более высокое быстродействие по сравнению с П-регулятором.
Недостатками ПД-регулятора являются чувствительность к импульсным помехам, а также наличие статической ошибки.
Статическую ошибку, возникающую при пропорциональном регулировании, можно исключить с помощью непрерывного суммирования величины ошибки и формирования сигнала управления, пропорционального полученной сумме. Такой процесс можно реализовать в случае применения интегрального закона регулирования.
Интегральный закон регулирования реализуется И-регулятором, его формула:
![]() .
.
Обычно вместо коэффициента передачи kИ используется параметр ТИ = 1/ kИ, который называется постоянной времени интегрирования. Постоянная времени интегрирования равна времени, в течение которого с момента поступления на вход регулятора постоянного сигнала выходной сигнал достигает значения, равного входному сигналу.
Передаточная функция интегрального регулятора имеет вид:
Этот регулятор наращивает управляющее воздействие до тех пор, пока управляемая величина отличается от требуемого значения, то есть пока e(t) ≠ 0.
И-регулятор (рис. 7.5) обеспечивает астатическое регулирование, что обусловлено наличием интегратора в контуре АСР.
Для астатической системы уравнения статики вырождаются в простейшие, поскольку Wастат(0) = ∞:
 .
.
Очевидно, что астатическая система в статике идеально следит и идеально стабилизирует.
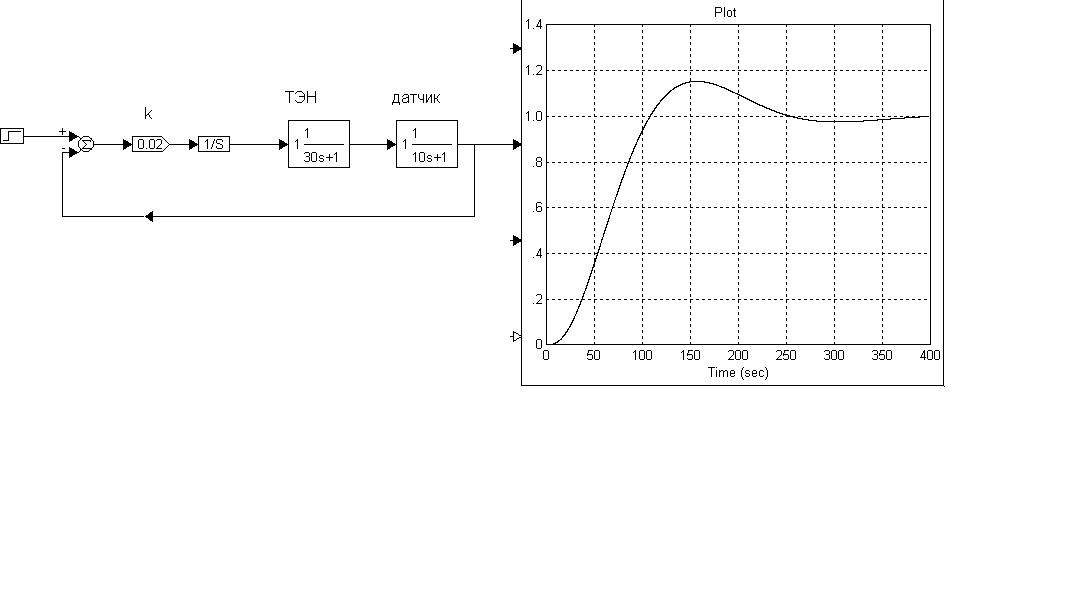
Рис. 7.5. Переходный процесс при регулировании И-регулятором
При малых e управляющее воздействие изменяется с малой скоростью, поэтому данный регулятор очень инерционный.
Чтобы увеличить быстродействие И-регулятора, его дополняют пропорциональным звеном, что дает пропорционально-интегральный закон регулирования (ПИ-регулятор), его формула:
 .
.
Первое слагаемое обеспечивает быстродействие, второе − астатичность, т. е. точность регулирования.
Передаточная функция пропорционально-интегрального регулятора описывается уравнением
При скачкообразном изменении регулируемой величины на величину е0 идеальный ПИ-регулятор вначале мгновенно перемещает исполнительный механизм на величину kП· е0, пропорциональную отклонению регулируемой величины, после чего исполнительный механизм регулятора дополнительно перемещается в ту же сторону со скоростью е / ТИ, пропорциональной отклонению регулируемой величины. Следовательно, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) часть регулятора, а затем постепенно увеличивается интегральная (астатическая) часть регулятора (рис. 7.6).
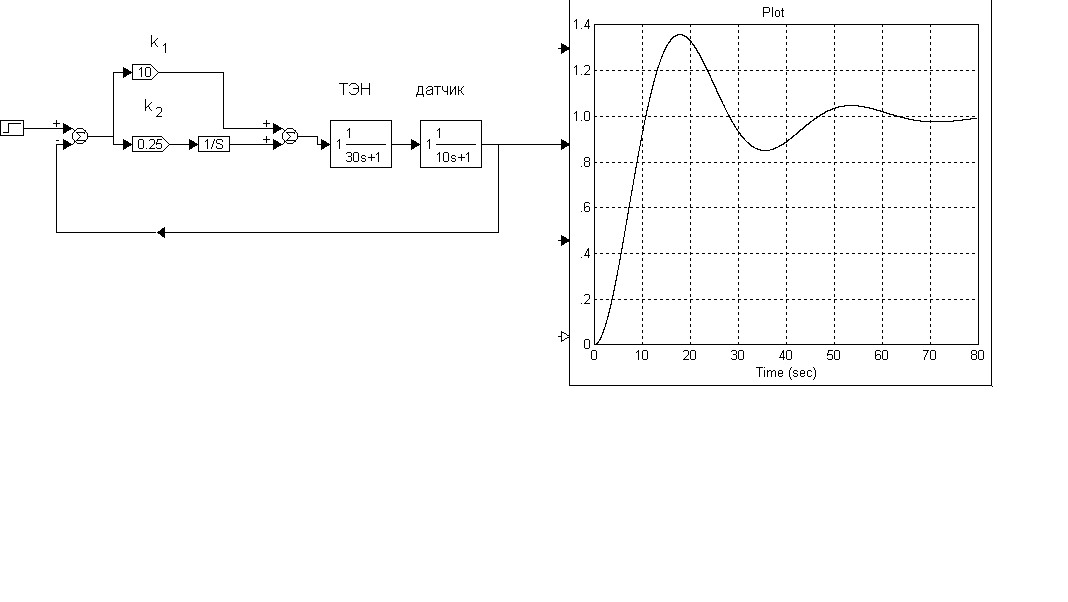
Рис. 7.6. Переходный процесс при регулировании ПИ-регулятором
Рассмотренный ПИ-регулятор имеет схему с независимыми настройками. ПИ- регуляторы, так же как и ПД-регуляторы, могут иметь структурную схему с общим коэффициентом передачи kП. В этом случае закон ПИ-регулирования имеет вид

где ТИЗ – постоянная времени изодрома.
При изменении kП одновременно будет изменяться постоянная времени интегрирования ТИ = ТИЗ / kП.
Передаточная функция регулятора описывается формулой
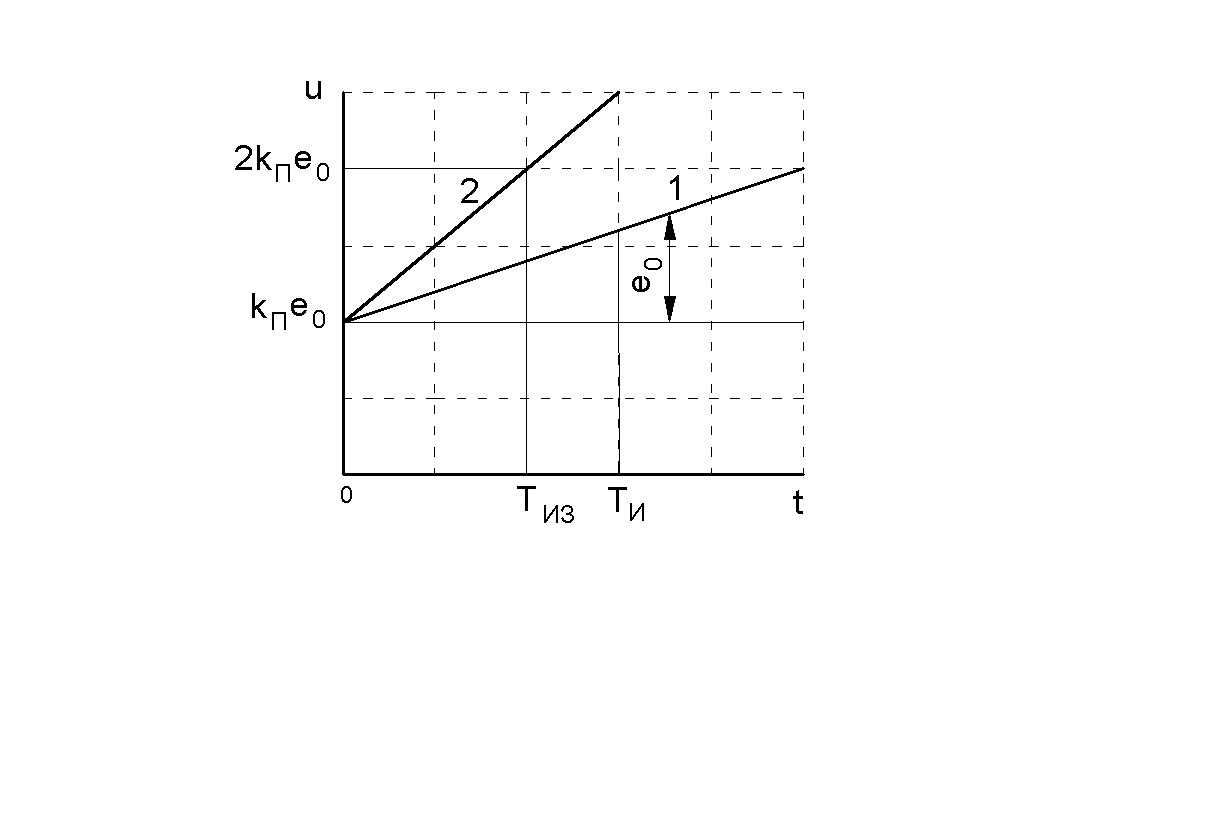
Рассмотрим физический смысл постоянной времени изодрома ТИЗ. Предположим, что на вход регулятора поступил постоянный сигнал ошибки е0. В этом случае уравнение регулирования можно преобразовать к следующему виду:
При поступлении на вход регулятора сигнала е0 в начальный момент сработает пропорциональная составляющая и на выходе регулятора появится сигнал kП∙е0. Затем начинает линейно нарастать интегральная составляющая выходного сигнала и при t = ТИЗ выходной сигнал достигнет величины u = 2kП∙е0. Следовательно, ТИЗ – это время, в течение которого от действия интегральной (астатической) составляющей величина выходного сигнала регулятора удваивается.
На рисунке 7.7 показаны законы регулирования для ПИ-регуляторов с независимыми (линия 1) и со связанными (линия 2) настройками при поступлении на вход регуляторов постоянного сигнала е0 при одинаковых значениях коэффициента передачи kП.
Повысить эффективность работы ПИ-регулятора возможно за счет добавления слагаемого, пропорционального производной от отклонения управляемой величины de(t)/dt, такой закон регулирования обеспечивается ПИД-регулятором, его формула:
 .
.
Рис. 7.7. Графики процессов ПИ-регулирования |
Передаточная функция регулятора имеет вид:
|

Рис. 7.8. Переходный процесс при регулировании ПИД-регулятором
Сравнение рисунков 7.6 и 7.8 показывает, что ПИД-регулятор имеет более высокое быстродействие по сравнению с ПИ-регулятором.
Очевидно, что с помощью ПИД-регулятора можно реализовать любой закон регулирования.
В приведенной схеме ПИД-регулятора каждая составляющая настраивается независимо от двух других. Современные микропроцессорные ПИД-регуляторы обычно реализуют вариант со связанными настройками, его уравнение:
|
 ,
,где ХП – диапазон пропорциональности регулятора (диапазон изменения сигнала ошибки, в пределах которого выходной сигнал регулятора u(t) изменяется от 0 до максимального значения); τД – постоянная времени дифференцирования (время предварения); TИ – постоянная времени интегрирования (время изодрома).