

Лекция 5.
Для определения угловой скорости
,
где
![]()
const var
Для того чтобы удерживать
колебания угловой скорости м
в заданных пределах, определяемых
коэффициентом неравномерности ,
первая группа звеньев должна иметь
![]()
2.6.3 Вывод формулы для определения .
Изменение м от м_max до м_min приводит к изменению кинетической энергии первой группы звеньев (ΔТI), которое равно:

![]()
![]()
 (2)
(2)
При установившемся режиме работы при определении м формулу (1) напрямую использовать нельзя, т.к. неизвестно Тнач, поэтому задачу решают, используя метод Мерцалова (см. учебник).
§2.7 Определение реакций в кинематических парах рычажных механизмов без учета трения.
Данная задача может быть решена:
аналитическим способом;
графическим способом (см.ДЗ №2).
Аналитический способ:
И зобразим
схему кривошипно-ползунного механизма.
зобразим
схему кривошипно-ползунного механизма.
Дано:
F3, G1, ФS1, MФ1, G2,
ФS2, МФ2, G3, ФS3,
i, i, vi, ai.
Определить:
М1 и Qij
Задачу начинают решать с того звена, к которому приложена известная сила или момент. Кроме того, введем понятие входной шарнир (проекции реакции Q на оси х и у положительны) и выходной шарнир (проекции реакции Q на оси - отрицательны).
Расстояние от входного шарнира до центра масс звена – р, а расстояние от выходного шарнира до центра масс звена – q.
Звено 1

Шарнир А - входной
Шарнир В - выходной
Звено 2
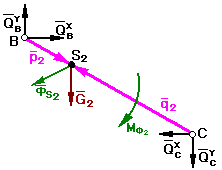
Шарнир В - входной
Шарнир С - выходной
З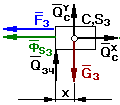 вено
3
вено
3
При решении задачи используется принцип Даламбера
3 звено:
2 звено:
1 звено:

Составим систему уравнений в матричной форме:
неизвестные |
QAx |
QAy |
QBx |
QBy |
QCx |
QCy |
Q34 |
M1 |
|
||||||
F3+ФS3 |
= |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
х |
QAx |
||||
G3 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
QAy |
||||||
ФS2x |
0 |
0 |
1 |
0 |
-1 |
0 |
0 |
0 |
QBx |
||||||
ФS2y+G2 |
0 |
0 |
0 |
1 |
0 |
-1 |
0 |
0 |
QBy |
||||||
MФ2 |
0 |
0 |
p2y |
-p2x |
-q2y |
q2x |
0 |
0 |
QCx |
||||||
ФS1x |
1 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
QCy |
||||||
ФS2y+G2 |
0 |
1 |
0 |
-1 |
0 |
0 |
0 |
0 |
Q34 |
||||||
MФ1 |
p1y |
-p1x |
-q1y |
q1x |
0 |
0 |
0 |
-1 |
M1 |
||||||
b A x
Эта система решается методом Гаусса.