

1)основные определения и понятия кинематики-
Долгое время понятия о кинематике были основаны на работах Аристотеля, в которых утверждалось, что скорость падения пропорциональна весу тела, а движение в отсутствие сил невозможно. Только в конце XVI века этим вопросом подробно занялся Галилео Галилей. Изучая свободное падение (знаменитые опыты на Пизанской башне) и инерцию тел, он доказал неправильность идей Аристотеля. Итоги своей работы по данной теме он изложил в книге «Беседы и математические доказательства, касающиеся двух новых отраслей науки, относящихся к механике и местному движению». Рождением современной кинематики можно считать выступление Пьера Вариньона перед Французской Академией наук 20 января 1700 года. Тогда впервые были даны понятия скорости и ускорения в дифференциальном виде.В XVIII веке Ампер первый использовал вариационное исчисление в кинематике.После создания СТО, показывающей, что время и пространство не абсолютны и скорость имеет принципиальное ограничение, кинематика вошла в новый этап развития в рамках релятивистской механики (см. Релятивистская кинематика).
Основные понятия кинематики
Система отсчёта — сопоставленная с континуумом реальных или воображаемых тел отсчёта система координат и прибор(ы) для измерения времени (часы). Используется для описания движения.
Координаты — способ определять положение точки или тела с помощью чисел или других символов.
Радиус-вектор используется для задания положения точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.
Траектория — непрерывная линия, которую описывает точка при своём движении.
Скорость — векторная величина, характеризующая быстроту перемещения и направление движения материальной точки в пространстве относительно выбранной системы отсчёта.
Ускорение — векторная величина, показывающая, насколько изменяется вектор скорости точки (тела) при её движении за единицу времени.
Угловая скорость — векторная величина, характеризующая скорость вращения тела.
Угловое ускорение — величина, характеризующая быстроту изменения угловой скорости.
Задачи кинематики
Главной задачей кинематики является математическое (уравнениями, графиками, таблицами и т. п.) определение положения и характеристик движения точек или тел во времени. Любое движение рассматривается в определённой системе отсчёта. Также кинематика занимается изучением составных движений (движений в двух взаимно перемещающихся системах отсчёта).
2) движение по окружности,ращательное движение
Враща́тельное движе́ние — вид механического движения. При вращательном движении абсолютно твёрдого тела его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной. Например, в системе отсчёта, связанной с Землёй, ось вращения ротора генератора на электростанции неподвижна.
При выборе некоторых осей вращения, можно получить сложное вращательное движение - сферическое движение, когда точки тела движутся по сферам.
Характеристики вращения тела
При равномерном вращении (T оборотов в секунду),
Частота вращения — число оборотов тела в единицу времени.
![]() ,
,
Период
вращения —
время одного полного оборота. Период
вращения T
и его частота
![]() связаны
соотношением
связаны
соотношением
![]() .
.
Линейная скорость точки, находящейся на расстоянии R от оси вращения
![]() ,
,
Угловая скорость вращения тела
![]() .
.
Момент инерции механической системы относительно неподвижной оси a («осевой момент инерции») — физическая величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
![]() ,
,
где: mi — масса i-й точки, ri — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси a подобно тому, как масса тела является мерой его инертности в поступательном движении.
Кинетическая энергия вращательного движения
![]()
где
Iz —
момент
инерции
тела относительно оси вращения.
![]() —
угловая
скорость
—
угловая
скорость
3)Первый закон Ньютона
Первый закон Ньютона постулирует наличие такого явления, как инерция тел. Поэтому он также известен как Закон инерции. Инерция — это явление сохранения телом скорости движения (и по величине, и по направлению), когда на тело не действуют никакие силы. Чтобы изменить скорость движения, на тело необходимо подействовать с некоторой силой. Естественно, результат действия одинаковых по величине сил на различные тела будет различным. Таким образом, говорят, что тела обладают инертностью. Инертность — это свойство тел сопротивляться изменению их текущего состояния. Величина инертности характеризуется массой тела.
Второй закон Ньютона
Основная статья: Второй закон Ньютона
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этого ускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта (ИСО).
П![]() ри
подходящем выборе единиц
измерения,
этот закон можно записать в виде формулы:
ри
подходящем выборе единиц
измерения,
этот закон можно записать в виде формулы:
где
![]() —
ускорение
материальной точки;
—
ускорение
материальной точки;
![]() —
сила,
приложенная к материальной точке;
—
сила,
приложенная к материальной точке;
![]() —
масса
материальной точки.
—
масса
материальной точки.
Третий закон Ньютона
Этот
закон объясняет, что происходит с двумя
взаимодействующими телами. Возьмём для
примера замкнутую систему, состоящую
из двух тел. Первое тело можетдействовать
на второе с некоторой силой
![]() ,
а второе — на первое с силой
,
а второе — на первое с силой
![]() .
Как соотносятся силы? Третий закон
Ньютона утверждает: сила действия равна
по модулю и противоположна по направлению
силе противодействия. Подчеркнём, что
эти силы приложены к разным телам, а
потому вовсе не компенсируются.
.
Как соотносятся силы? Третий закон
Ньютона утверждает: сила действия равна
по модулю и противоположна по направлению
силе противодействия. Подчеркнём, что
эти силы приложены к разным телам, а
потому вовсе не компенсируются.
4
 )закон
всемирного тяготения.вес,невесомость,перегрузка-
)закон
всемирного тяготения.вес,невесомость,перегрузка-
Гравитационное взаимодействие
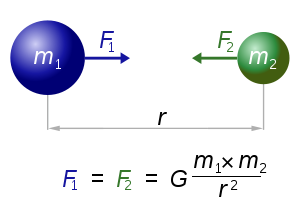
Закон всемирного тяготения.
В![]() рамках классической
механики
гравитационное взаимодействие описывается
законом
всемирного тяготения
Ньютона, который гласит, что сила
гравитационного притяжения между двумя
материальными точками массы
и
рамках классической
механики
гравитационное взаимодействие описывается
законом
всемирного тяготения
Ньютона, который гласит, что сила
гравитационного притяжения между двумя
материальными точками массы
и
![]() ,
разделёнными расстоянием
,
разделёнными расстоянием
![]() ,
пропорциональна обеим массам и обратно
пропорциональна квадрату расстояния —
то есть:
,
пропорциональна обеим массам и обратно
пропорциональна квадрату расстояния —
то есть:
Здесь
![]() —
гравитационная
постоянная,
равная примерно 6,6725×10-11
м³/(кг·с²).
—
гравитационная
постоянная,
равная примерно 6,6725×10-11
м³/(кг·с²).
Закон всемирного тяготения — одно из приложений закона обратных квадратов, встречающегося также и при изучении излучений (см., например, Давление света), и являющегося прямым следствием квадратичного увеличения площади сферы при увеличении радиуса, что приводит к квадратичному же уменьшению вклада любой единичной площади в площадь всей сферы.
Гравитационное поле, так же как и поле силы тяжести, потенциально. Это значит, что можно ввести потенциальную энергию гравитационного притяжения пары тел, и эта энергия не изменится после перемещения тел по замкнутому контуру. Потенциальность гравитационного поля влечёт за собой закон сохранения суммы кинетической и потенциальной энергии и при изучении движения тел в гравитационном поле часто существенно упрощает решение. В рамках ньютоновской механики гравитационное взаимодействие является дальнодействующим. Это означает, что как бы массивное тело ни двигалось, в любой точке пространства гравитационный потенциал зависит только от положения тела в данный момент времени.
Большие космические объекты — планеты, звезды и галактики имеют огромную массу и, следовательно, создают значительные гравитационные поля.
Гравитация — слабейшее взаимодействие. Однако, поскольку оно действует на любых расстояниях, и все массы положительны, это, тем не менее, очень важная сила во Вселенной. В частности, электромагнитное взаимодействие между телами на космических масштабах мало, поскольку полный электрический заряд этих тел равен нулю (вещество в целом электрически нейтрально).
Также гравитация, в отличие от других взаимодействий, универсальна в действии на всю материю и энергию. Не обнаружены объекты, у которых вообще отсутствовало бы гравитационное взаимодействие.
Из-за глобального характера гравитация ответственна и за такие крупномасштабные эффекты, как структура галактик, черные дыры и расширение Вселенной, и за элементарные астрономические явления — орбиты планет, и за простое притяжение к поверхности Земли и падения тел.
Гравитация была первым взаимодействием, описанным математической теорией. Аристотель считал, что объекты с разной массой падают с разной скоростью. Только много позже Галилео Галилей экспериментально определил, что это не так — если сопротивление воздуха устраняется, все тела ускоряются одинаково. Закон всеобщего тяготения Исаака Ньютона (1687) хорошо описывал общее поведение гравитации. В 1915 году Альберт Эйнштейн создал Общую теорию относительности, более точно описывающую гравитацию в терминах геометрии пространства-времени.
5) миханич.работа-
Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек) тела или системы].
Кинетическая энергия вводится в механике в прямой связи с понятием работы.
С![]() хема
рассуждений такова: 1) попробуем записать
работу, совершаемую всеми силами,
действующими на материальную точку и,
пользуясь вторым
законом Ньютона
(позволяющим выразить силу через
ускорение), попытаться выразить ответ
только через кинематические величины,
2) убедившись, что это удалось, и что этот
ответ зависит только от начального и
конечного состояния движения, введём
новую физическую величину, через которую
эта работа будет просто выражаться (это
и будет кинетическая энергия).
хема
рассуждений такова: 1) попробуем записать
работу, совершаемую всеми силами,
действующими на материальную точку и,
пользуясь вторым
законом Ньютона
(позволяющим выразить силу через
ускорение), попытаться выразить ответ
только через кинематические величины,
2) убедившись, что это удалось, и что этот
ответ зависит только от начального и
конечного состояния движения, введём
новую физическую величину, через которую
эта работа будет просто выражаться (это
и будет кинетическая энергия).
Потенциальная энергия
Сила называется потенциальной, если существует скалярная функция, известная как потенциальная энергия и обозначаемая
6) закон сохранения импульса
Зако́н сохране́ния и́мпульса (Зако́н сохране́ния количества движения) утверждает, что векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
З![]() акон
сохранения импульса в общей теории
относительности
акон
сохранения импульса в общей теории
относительности
Основная статья: Проблема законов сохранения в общей теории относительности
Аналогично ситуации с законом сохранения энергии, при переходе к искривлённому пространству-времени закон сохранения импульса, выражаемый пространственными компонентами соотношения для тензора энергии-импульса где точка с запятой выражает ковариантную производную, приводит лишь к локально сохраняющимся величинам. Это связано с отсутствием глобальной однородности пространства в пространстве-времени общего вида.
Можно придумать такие определения импульса гравитационного поля, что глобальный закон сохранения импульса будет выполняться при движении во времени системы тел и полей, но все такие определения содержат элемент произвола, так как вводимый импульс гравитационного поля не может быть тензорной величиной при произвольных преобразованиях координат.
7) Реактивная тяга — сила, возникающая в результате взаимодействия двигательной установки с истекающей из сопла струей расширяющихся жидкости или газа, обладающих кинетической энергией.[1]
В основу возникновения реактивной тяги положен закон сохранения импульса. Реактивная тяга обычно рассматривается как сила реакции отделяющихся частиц. Точкой приложения её считают центр истечения - центр среза сопла двигателя, а направление - противоположное вектору скорости истечения продуктов сгорания (или рабочего тела, в случае не химического двигателя) . То есть, реактивная тяга:
приложена непосредственно к корпусу реактивного двигателя;
обеспечивает передвижение реактивного двигателя и связанного с ним объекта в сторону, противоположную направлению реактивной струи.[2]
Величина реактивной тяги
Формула при отсутствии внешних сил
Если нет внешних сил, то ракета вместе с выброшенным веществом является замкнутой системой. Импульс такой системы не может меняться во времени.
![]()
![]()
![]()
![]()
![]() ,
где: масса
ракеты:
,её ускорение-
, скорость
истечения газов- ,
расход массы топлива
в единицу времени
,
где: масса
ракеты:
,её ускорение-
, скорость
истечения газов- ,
расход массы топлива
в единицу времени
Поскольку скорость истечения продуктов сгорания (рабочего тела) определяется физико-химическими свойствами компонентов топлива и конструктивными особенностями двигателя являясь постоянной величиной при не очень больших изменениях режима работы реактивного двигателя, то величина реактивной силы определяется в основном массовым секундным расходом топлива.
10. Вынужденные колебания.Резонанс
Вынужденные колебания — колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы.
Н![]() аиболее
простой и содержательный пример
вынужденных колебаний можно получить
из рассмотрения гармонического
осциллятора
и вынуждающейсилы, которая изменяется
по закону:
аиболее
простой и содержательный пример
вынужденных колебаний можно получить
из рассмотрения гармонического
осциллятора
и вынуждающейсилы, которая изменяется
по закону:
8) механич.колебания.гормонические колебания.их характеристики
Колеба́ния — повторяющийся в той или иной степени во времени процесс изменения состояний системы около точки равновесия. Например, при колебаниях маятника повторяются отклонения его в ту и другую сторону от вертикального положения; при колебаниях в электрическом колебательном контуре повторяются величина и направление тока, текущего через катушку.
Колебания почти всегда связаны с попеременным превращением энергии одной формы проявления в другую форму.
Колебания различной физической природы имеют много общих закономерностей и тесно взаимосвязаны c волнами. Поэтому исследованиями этих закономерностей занимается обобщённая теория колебаний и волн. Принципиальное отличие от волн: при колебаниях не происходит переноса энергии, это, так сказать, «местные» преобразования энергии.
По характеру взаимодействия с окружающей средой
Вынужденные — колебания, протекающие в системе под влиянием внешнего периодического воздействия. Примеры: листья на деревьях, поднятие и опускание руки. При вынужденных колебаниях может возникнуть явление резонанса: резкое возрастание амплитуды колебаний при совпадении собственной частоты осциллятора и частоты внешнего воздействия.
Свободные (или собственные) — это колебания в системе под действием внутренних сил, после того как система выведена из состояния равновесия (в реальных условиях свободные колебания всегда затухающие). Простейшими примерами свободных колебаний являются колебания груза, прикреплённого к пружине, или груза, подвешенного на нити.
Автоколебания — колебания, при которых система имеет запас потенциальной энергии, расходующейся на совершение колебаний (пример такой системы — механические часы). Характерным отличием автоколебаний от свободных колебаний является, то что их амплитуда определяется свойствами самой системы, а не начальными условиями.
Параметрические — колебания, возникающие при изменении какого-либо параметра колебательной системы в результате внешнего воздействия.
Случайные — колебания, при которых внешняя или параметрическая нагрузка является случайным процессом.
9.математические,физические и пружинные маятники
Ма́ятник — система, подвешенная в поле тяжести и совершающая механические колебания. Колебания совершаются под действием силы тяжести, силы упругости и силы трения. Во многих случаях трением можно пренебречь, а от сил упругости (либо сил тяжести) абстрагироваться, заменив их связями.
Во время колебаний маятника происходят постоянные превращения энергии из одного вида в другой. Кинетическая энергия маятника превращается в потенциальную энергию (гравитационную, упругую) и обратно. Кроме того, постепенно происходит диссипация кинетической энергии в тепловую за счёт сил трения.
Одним из простейших маятников является шарик, подвешенный на нити. Идеализацией этого случая является математический маятник — механическая система, состоящая из материальной точки, подвешенной на невесомой нерастяжимой нити или на невесомом стержне в поле тяжести.
Если размерами массивного тела пренебречь нельзя, но всё еще можно не учитывать упругих колебаний тела, то можно прийти к понятию физического маятника. Физический маятник — твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной горизонтальной оси, не проходящей через центр масс этого тела.
Система из нескольких шариков, подвешенных на нитях в одной плоскости, колеблющихся в этой плоскости и соударяющихся друг с другом, называется маятником Ньютона. Здесь уже приходится учитывать упругие процессы.
Маятник Фуко — это груз, подвешенный на нити, способный изменять плоскость своих колебаний.
Ещё одним простейшим маятником является пружинный маятник. Пружинный маятник — это груз, подвешенный на пружине и способный колебаться вдоль вертикальной оси.
Крутильный маятник — механическая система, представляющая собой тело, подвешенное в поле тяжести на тонкой нити и обладающее лишь одной степенью свободы: вращением вокруг оси, задаваемой неподвижной нитью.
Маятники используются в различных приборах, например, в часах и сейсмографах.
Маятники облегчают изучение колебаний, так как наглядно демонстрируют их свойства.
10. вынужденные колебания.резонанс
Вынужденные колебания — колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы.
Наиболее простой и содержательный пример вынужденных колебаний можно получить из рассмотрения гармонического осциллятора и вынуждающей
силы, которая изменяется по закону: