

Подстановка (4.26) в (4.27) даст
![]() . (4.28)
. (4.28)
Соответствующая алгоритмам (4.27) и (4.28) диаграмма изменения выходной ЭДС приведена на рис. 4.16. Если
![]() и
и
![]() ,
,
то среднее значение выпрямленной выходной ЭДС
![]() .
.
Так
как
![]() ,
а среднее значение выходного напряжения
,
а среднее значение выходного напряжения
![]() ,
то
,
то
![]() , (4.29)
, (4.29)
где
![]() – передаточный коэффициент от входного
напряжения к ЭДС контура.
– передаточный коэффициент от входного
напряжения к ЭДС контура.
Для
![]() или
или
![]() и
и
![]() имеет место амплитудный режим ФД, для
которого характеристика управления
прямолинейна
имеет место амплитудный режим ФД, для
которого характеристика управления
прямолинейна
![]() , (4.30)
, (4.30)
где
![]() – коэффициент усиления ФД в амплитудном
режиме. Для
– коэффициент усиления ФД в амплитудном
режиме. Для
![]() и
имеет место фазовый режим ФД, для которого
и
имеет место фазовый режим ФД, для которого
![]() , (4.31)
, (4.31)
где
![]() .
.
При
малых
![]()
![]() , (4.32)
, (4.32)
где
![]() – передаточный
коэффициент ФД в фазовом режиме.
– передаточный
коэффициент ФД в фазовом режиме.
Рассмотрим
цифро-аналоговый
преобразователь
(ЦАП),
согласующий цифровую часть системы
управления с аналоговой. Входная
координата ЦАП – двоичное многоразрядное
число
![]() ,
а выходная координата
– напряжение
,
а выходная координата
– напряжение
![]() ,
формируемое на основе опорного напряжения
,
формируемое на основе опорного напряжения
![]() (рис.
4.17).
(рис.
4.17).
Схемы
ЦАП строятся на основе резисторной
матрицы, с помощью которой происходит
суммирование токов или напряжений так,
что выходное напряжение пропорционально
входному числу. В составе ЦАП можно
выделить три основные части: резисторная
матрица, электронные ключи, управляемые
входным числом, и суммирующий усилитель,
формирующий выходное напряжение. На
рис.
4.18 приведена
простая схема нереверсивного ЦАП.
Каждому разряду входного двоичного
числа
![]() соответствует сопротивление
соответствует сопротивление
![]() ,
(4.33)
,
(4.33)
где
![]() – сопротивление
младшего разряда, Ом.
– сопротивление
младшего разряда, Ом.
Резистор
![]() подключается к источнику питания с
опорным напряжением
через электронный ключ
подключается к источнику питания с
опорным напряжением
через электронный ключ
![]() ,
который замкнут при
,
который замкнут при
![]() и разомкнут при
и разомкнут при
![]() .
Очевидно, что в зависимости от значения
.
Очевидно, что в зависимости от значения
![]() ,
сопротивление входной цепи для i-го
разряда определится выражением
,
сопротивление входной цепи для i-го
разряда определится выражением
![]() . (4.34)
. (4.34)
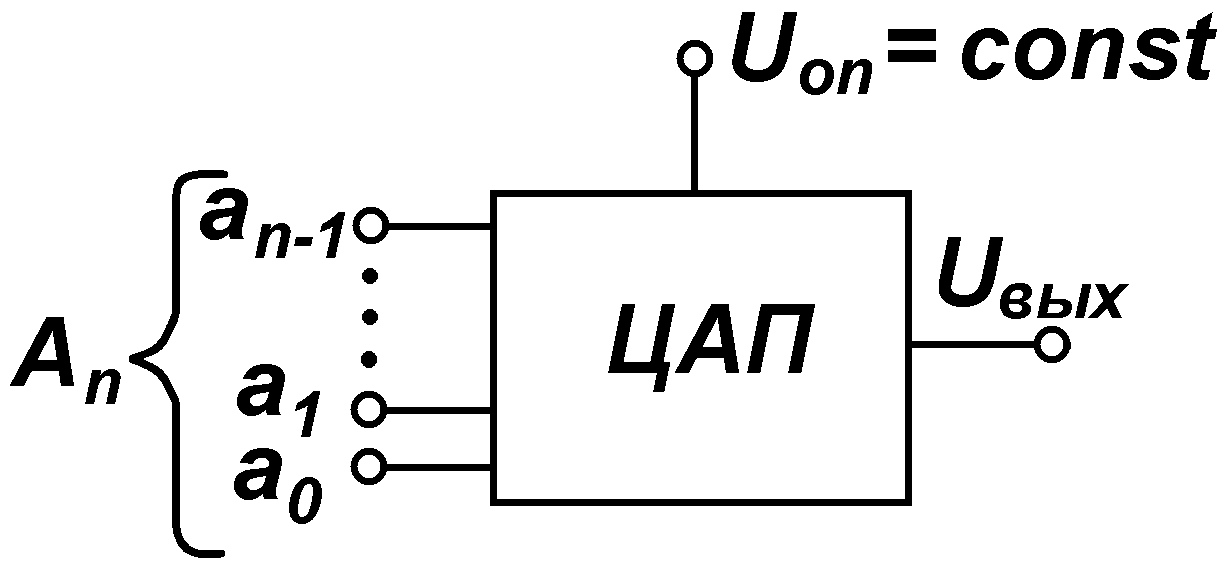
Рис. 4.17. Основные координаты ЦАП

Рис. 4.18. Схема неверсивного ЦАП
Тогда
для
,
т. е. цепь разорвана, а для
цепь включена и имеет сопротивление
![]() .
Выходное напряжение операционного
усилителя A,
суммирующего входные токи, в соответствии
с
(4.8) и с
учетом
(4.34) находится
с помощью выражения
.
Выходное напряжение операционного
усилителя A,
суммирующего входные токи, в соответствии
с
(4.8) и с
учетом
(4.34) находится
с помощью выражения
![]() . (4.35)
. (4.35)
Таким
образом, характеристика управления ЦАП
![]() имеет ступенчатую форму с дискретностью
по напряжению, соответствующей младшему
разряду,
имеет ступенчатую форму с дискретностью
по напряжению, соответствующей младшему
разряду,
![]() . (4.36)
. (4.36)
Величина
![]() является
одновременно и усредненным передаточным
коэффициентом ЦАП.
является
одновременно и усредненным передаточным
коэффициентом ЦАП.
Рассмотренная схема ЦАП предусматривает разные номиналы входных разрядных сопротивлений. Чем старше разряд, тем меньше сопротивление и больше ток, тем выше требования к классу точности изготовления резистора по значению сопротивления. Разброс тока для i-го разряда должен быть меньше значения тока самого младшего разряда, т. е.
![]() , (4.37)
, (4.37)
откуда требуемая относительная точность составит
![]() . (4.38)
. (4.38)
Так, согласно (4.38) при числе разрядов n=10 требуемая точность изготовления резистора старшего разряда составит около 0,1 %, что намного превышает практически реализуемую точность в стандартных элементах. При большом числе разрядов требуется большое разнообразие в резисторах, как по значениям сопротивлений, так и по классу точности. Эти недостатки ограничивают применение данной схемы преобразователями с небольшой разрядностью. Другим недостатком схемы является факт подачи на ключи полного напряжения , что усложняет схемы электронных ключей и снижает частоту их переключения из-за паразитных емкостей. Отмеченные недостатки в значительной мере устраняются в схеме, в которой используются однотипные резисторы и электронные ключи, постоянно обтекаемые токами.
На
рис.
4.19 изображена
схема с резисторной матрицей с двумя
номиналами сопротивлений R
и 2R
для любого числа разрядов. Все
резисторы обтекаются неизменными
токами независимо от положения электронных
ключей
![]() .
Управляемые входным числом
.
Управляемые входным числом
![]() ключи имеют
два положения: замкнуты на шину
ключи имеют
два положения: замкнуты на шину
![]() ,
если
соответствующие ai=0,
и замкнуты на шину
,
если
соответствующие ai=0,
и замкнуты на шину
![]() ,
если аi=1.
На резисторах R
и 2R
в точках
3, 2, 1,
0
происходит последовательно деление
пополам тока и напряжения, при этом
ток
i-го
разряда, протекающий в шину
,
определяется формулой
,
если аi=1.
На резисторах R
и 2R
в точках
3, 2, 1,
0
происходит последовательно деление
пополам тока и напряжения, при этом
ток
i-го
разряда, протекающий в шину
,
определяется формулой
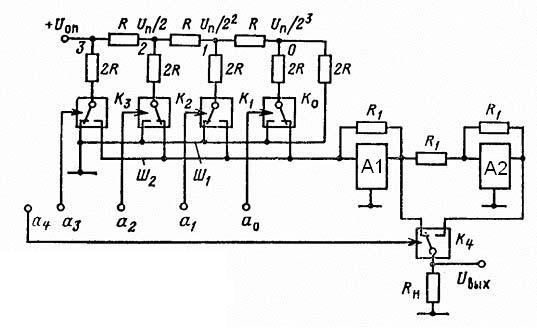

Рис. 4.19 Схема реверсивного ЦАП с резисторной
матрицей постоянного сопротивления
![]() (4.39)
(4.39)
Выходное напряжение на выходе первого усилителя А1 выражается через суммарный входной ток следующим образом:
 (4.40)
(4.40)
Дискретность и усредненный передаточный коэффициент ЦАП в данной схеме составляют:
![]() . (4.41)
. (4.41)
Очевидно,
что напряжение на выходе второго
усилителя будет отличаться от
(4.40) только
знаком. Полярность выходного напряжения
ЦАП, выделяющегося на сопротивлении
нагрузки
,
определяется положением электронного
ключа
![]() ,
который управляется самым старшим,
знаковым разрядом входного числа (рис.
4.19). При
,
который управляется самым старшим,
знаковым разрядом входного числа (рис.
4.19). При
![]() ключ замкнут на выход A2
и
ключ замкнут на выход A2
и
![]() ,
при
,
при
![]() ключ перекинут на A1
и
ключ перекинут на A1
и
![]() .
.
Аналого-цифровой
преобразователь
(АЦП) решает обратную задачу
– преобразует
входное непрерывное по форме напряжение
в пропорциональное ему число. Каждому
выходному числу
![]() соответствует диапазон изменения
входного напряжения:
соответствует диапазон изменения
входного напряжения:
![]() , (4.42)
, (4.42)
где
![]() (4.43)
(4.43)
– эталонное
значение входного напряжения,
соответствующее выходному числу
![]() ;
– дискретность по напряжению,
соответствующая единице младшего
разряда выходного числа, В.
;
– дискретность по напряжению,
соответствующая единице младшего
разряда выходного числа, В.
При
n-разрядном
АЦП общее число отличных от нуля
эталонных уровней входного напряжения,
отличающихся друг от друга на
![]() ,
равно максимальному выходному числу
,
равно максимальному выходному числу
![]() .
Так как каждый уровень
.
Так как каждый уровень
![]() согласно
(4.42) несет
в себе информацию о числе, то в работе
АЦП можно выделить основные операции:
сравнение входного и эталонного
напряжений, определение номера уровня,
формирование выходного числа в заданном
коде. Усредненный передаточный коэффициент
АЦП определяется как обратная величина
соответствующего коэффициента ЦАП:
согласно
(4.42) несет
в себе информацию о числе, то в работе
АЦП можно выделить основные операции:
сравнение входного и эталонного
напряжений, определение номера уровня,
формирование выходного числа в заданном
коде. Усредненный передаточный коэффициент
АЦП определяется как обратная величина
соответствующего коэффициента ЦАП:
![]() . (4.44)
. (4.44)
Схемы
реализации АЦП можно разделить на два
основных типа: параллельного действия
и последовательного действия. На
рис.
4.20
представлена схема АЦП параллельного
действия. С помощью резисторного
делителя выделяются уровни эталонного
напряжения в точках 1,2,
..., N.
Сравнение
![]() и
и
![]() выполняется на компараторах
выполняется на компараторах
![]() ,
в качестве
которых используются операционные
усилители с однополярным выходом. При
,
в качестве
которых используются операционные
усилители с однополярным выходом. При
![]() на выходах компараторов имеет место
нулевой сигнал, а при
на выходах компараторов имеет место
нулевой сигнал, а при
![]() компараторы дают единичный сигнал
на своих выходах, который запоминается
D –
триггерами.
Число единиц на выходах триггеров
преобразуется с помощью шифратора CD
в код n-разрядного
двоичного числа
компараторы дают единичный сигнал
на своих выходах, который запоминается
D –
триггерами.
Число единиц на выходах триггеров
преобразуется с помощью шифратора CD
в код n-разрядного
двоичного числа
![]() ,
равного
i.
Достоинство данной схемы АЦП – высокое
быстродействие (два такта), недостаток
– большое
число компараторов и триггеров
,
равного
i.
Достоинство данной схемы АЦП – высокое
быстродействие (два такта), недостаток
– большое
число компараторов и триггеров
![]() .
Так, для восьмиразрядного АЦП потребовалось
бы
255 компараторов
и
255 триггеров.
.
Так, для восьмиразрядного АЦП потребовалось
бы
255 компараторов
и
255 триггеров.
Существенно
меньшие аппаратурные затраты требуются
в АЦП последовательного действия. На
рис.
4.21 приведена
схема следящего АЦП, относящаяся к
группе схем последовательного действия.
Сравнение
![]() и
и
![]() выполняется на комбинированном
аналоговом компараторе K
с двумя
выходами: «больше»
(>) и
«меньше»
(<). Если
выполняется на комбинированном
аналоговом компараторе K
с двумя
выходами: «больше»
(>) и
«меньше»
(<). Если
![]() ,
то единичный сигнал оказывается на
выходе
>,
при этом элемент
,
то единичный сигнал оказывается на
выходе
>,
при этом элемент
![]() проводит тактовые импульсы на
суммирующий вход (+1)
реверсивного счетчика СР.
Растет выходное число СР, и соответственно
увеличивается
,
формируемое ЦАП. Если
проводит тактовые импульсы на
суммирующий вход (+1)
реверсивного счетчика СР.
Растет выходное число СР, и соответственно
увеличивается
,
формируемое ЦАП. Если
![]() ,
то единичный сигнал появляется на выходе
, при
этом импульсы от генератора тактовых
импульсов проходят на вход вычитания
(-1) СР и
,
то единичный сигнал появляется на выходе
, при
этом импульсы от генератора тактовых
импульсов проходят на вход вычитания
(-1) СР и
![]() уменьшается.
уменьшается.
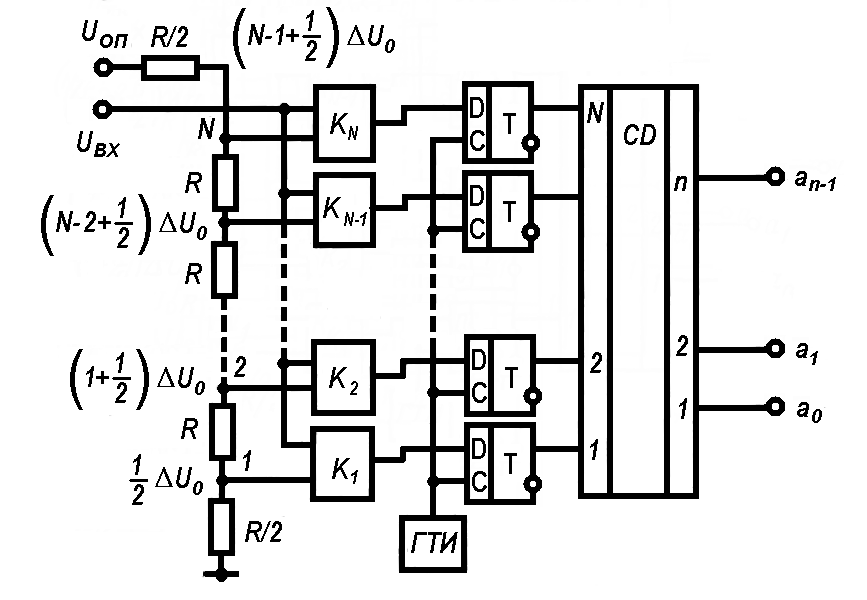
Рис. 4.20. Схема АЦП параллельного действия
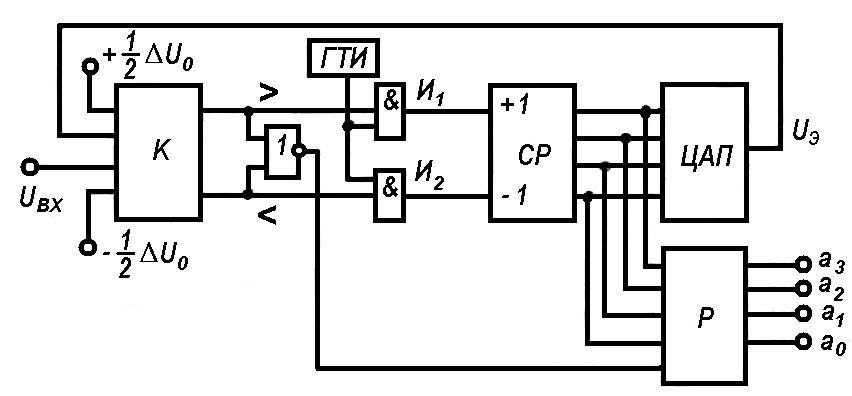
Рис. 4.21. Схема следящего АЦ
При
выполнении условия
![]() на обоих выходах K
выделяются нулевые сигналы и элементы
и
на обоих выходах K
выделяются нулевые сигналы и элементы
и
![]() оказываются
запертыми для тактовых импульсов.
Счетчик прекращает считать, и остающееся
на его выходе неизменным число появляется
на выходе регистра Р.
Разрешение на запись числа в регистр
дает единичный сигнал элемента ИЛИ—НЕ,
включенного на два выхода K.
Рассматривая
данную схему относительно
и
,
можно
установить, что АЦП представляет собой
замкнутую по выходной координате
систему регулирования с регулятором
K
релейного действия. Система отслеживает
эталонным напряжением на выходе ЦАП
изменение входного напряжения с
установившейся точностью
оказываются
запертыми для тактовых импульсов.
Счетчик прекращает считать, и остающееся
на его выходе неизменным число появляется
на выходе регистра Р.
Разрешение на запись числа в регистр
дает единичный сигнал элемента ИЛИ—НЕ,
включенного на два выхода K.
Рассматривая
данную схему относительно
и
,
можно
установить, что АЦП представляет собой
замкнутую по выходной координате
систему регулирования с регулятором
K
релейного действия. Система отслеживает
эталонным напряжением на выходе ЦАП
изменение входного напряжения с
установившейся точностью
![]() и выдает на цифровом выходе число,
соответствующее
.
Следящий
АЦП позволяет быстро преобразовать
достаточно медленное изменение входного
напряжения. В самом неблагоприятном
случае, когда скачком задано максимальное
напряжение, для выдачи соответствующей
выходной величины в цифровом коде
потребуется
и выдает на цифровом выходе число,
соответствующее
.
Следящий
АЦП позволяет быстро преобразовать
достаточно медленное изменение входного
напряжения. В самом неблагоприятном
случае, когда скачком задано максимальное
напряжение, для выдачи соответствующей
выходной величины в цифровом коде
потребуется
![]() тактов.
тактов.
5. ДАТЧИКИ
5.1. Общие понятия
Датчики являются неотъемлемой частью автоматизированного электропривода и используются для контроля действительных значений регулируемых величин. При этом они осуществляют преобразование значения контролируемого параметра в соответствующее ему значение электрического сигнала. Датчики можно классифицировать по принципу измерения и по типу конструкции. По принципу измерения (по абсолютным значениям или приращениям от нулевой точки) они подразделяются на абсолютные или циклические.
Абсолютные датчики обеспечивают показания значений текущих параметров относительно начало координат. Их характерной особенностью является то, что они обеспечивают каждому значению контролируемой величины единственное значение выходного сигнала. К этой разновидности датчиков относятся емкостные с переменным зазором, потенциометрические однооборотные и др.
Циклические датчики характеризуются тем, что у них изменение параметров выходного сигнала в функции смещения или вращения измеряемых элементов носит циклический характер, т.е. принимает одни и те же значения в различных точках участка измерения. Выходной сигнал циклического датчика может однозначно определить положение каждой точки измеряемого элемента только при наличии в измерительной системе счетчика полных циклов. Циклические датчики являются наиболее распространенными в системах измерения, контролирующих угловые и линейные перемещения.
По конструкции датчики могут быть линейными и круговыми. В линейных датчиках для измерения используются линейные перемещения конструкции, в круговых – угловые перемещения.
По виду сигналов датчики делятся на аналоговые и цифровые. В аналоговых датчиках выходная величина имеет непрерывный характер, а в цифровых - дискретный.
Датчики характеризуются рядом метрологических характеристик: величина контролируемого параметра, точность, чувствительность, порог чувствительности, стабильность работы.
Величина контролируемого параметра – это коэффициент преобразования, представляющий отношение изменения переменного параметра к величине, вызвавшей это изменение.
Точность датчика – это максимальная погрешность во всем диапазоне измерения.
Чувствительность датчика – это коэффициент преобразования, представляющий отношение изменения переменного параметра к величине, вызвавшей это изменение.
Порог чувствительности – это величина минимального изменения контролируемого параметра, которое может быть надежно и достоверно преобразовано в изменение соответствующего физического параметра.
Стабильность работы датчика – это максимальная разность значений переменного параметра, которая соответствует одной и той же величине контролируемого параметра, измеряемого многократно.