

8.3 Электромеханические искатели
Электромеханические искатели широко применяются в коммутационных системах различного назначения. В электромеханических искателях коммутация между входом и выходом создаётся за счет механического контакта скольжения типа «щётка - ламель».
Электромеханический искатель обычно состоит из следующих частей (рис. 8.6):
контактного поля (статора);
подвижной части (ротора);
движущего механизма (привода).
Статор – совокупность изолированных ламелей, к которым подключается m k-проводных выходов искателя. Ротор – щётки, к которым подключается k-проводный вход искателя. Привод – перемещает щётки ротора в требуемое положение. Различают искатели шаговые, декадно-шаговые и релейные. В шаговых искателях каждый импульс тока, воздействующий на привод, перемещает его щётки на один шаг, с одной ламели на другую (рис. 8.6а).
Рис. 8.6. Кинематическая схема (а) и условное изображение (б) шагового искателя
При поступлении импульса тока в обмотку электромагнита (ЭМ) якорь (Я) притягивается к сердечнику и с помощью движущей собачки (С), упирающейся в зуб храпового колеса (Х), перемещает щётки (Щ) на один шаг. По окончании импульса тока якорь под действием пружины П возвращается в исходное положение. При этом движущая собачка, скользя по скосу зуба храпового колеса, попадает в следующую его впадину. В декадно-шаговых АТС применялись шаговые искатели ШИ-11, ШИ-17, ШИ-25 с параметрами:
ШИ-11 → α=120º, m=10 (проводность k = 3÷5);
ШИ-17 → α=180º, m=15;
ШИ-25 → α=180º, m=25 (проводность k = 4÷8).
Недостатком шаговых искателей является малое число выходов (m≤25).
Декадно-шаговые искатели (ДШИ) были изобретены в 1889 г. братьями Строуджер. ДШИ-100 характеризуется декадным (десятичным) построением поля и наличием шагового подъёмно-вращательного движения щёток (рис. 8.7). Контактное поле состоит из трёх расположенных одна над другой секций a, b и c. Каждая секция содержит 10 рядов контактных ламелей. В каждом ряду (декаде) установлены 10 лемелей, расположенных по дуге.

Рис. 8.7. Упрощенная электромеханическая схема декадно-шагового искателя
Для обозначения числа 10 используется цифра 0. Искатель трёхпроводный, т.е. имеет три контактные щётки a, b, c, установленные одна над другой. Ротор (Р) содержит: щётки (Щ), храповой полуцилиндр ХП, зубчатую рейку (ЗР), сцепленную с храповым полуцилиндром.
Движущий механизм состоит из следующих элементов:
электромагнита подъёма (ПЭ);
электромагнита вращения (ВЭ);
собачки подъёма (ПС);
собачки вращения (ВС);
пружины П1, П2.
Ротор со щетками совершает из исходного положения (щётки внизу поля) два движения: первое подъёмное вдоль вертикали контактного поля, второе вращательное.
ДШИ – управляется импульсами тока, которые вначале поступают в обмотку подъёмного электромагнита ПЭ, а затем в обмотку вращающего электромагнита ВЭ. После окончания импульса тока электромагнит ПЭ отпускает свой якорь, который под действием пружины П1 возвращается в исходное состояние. Собачка ПС западает в следующую впадину зубчатой рейки ЗР и осуществляет подъёмное движение ротора. Аналогично работает движущий механизм вращения. Количество шагов подъёмного движения и вращения, совершаемых ротором, равно числу импульсов тока, поступивших в обмотку ПЭ и ВЭ.
После окончания соединения щётки должны возвратиться в исходное положение. Для этого в обмотку ВЭ подаются дополнительные импульсы. Щётки выходят за пределы поля и под действием силы тяжести падают вниз. После этого они поворачиваются влево и устанавливаются в исходное положение. Т.о. при каждом цикле действия щётки искателя описывают замкнутый четырёхугольник.
Характеристики электромеханических искателей:
сопротивление контакта щётка-ламель ≈2 Ом;
время установления соединения (при скорости движения щёток 25-35 шагов/с) составляет 200-700мс;
срок службы - 2·105-106 рабочих циклов
Недостатки ДШИ:
Дрожание контакта скольжения.
Т.к. число ламелей велико, то их нельзя изготавливать из драгоценных металлов.
Необходимость частой чистки ламелей.
Для управления механизмом требуются большие токи.
Для соединения требуется большое время.
В релейных искателях вместо контактов скольжения используются контакты давления и перечисленные выше недостатки уменьшены. Простейший релейный искатель на N входов изображён на рис. 8.8а.
Под воздействием управляющего тока, действующего на электромагнитную систему реле, замыкаются контакты и вход соединяется с k-м выходом. Недостаток такой организации релейного искателя большое количество реле, если количество выходов n велико.
Р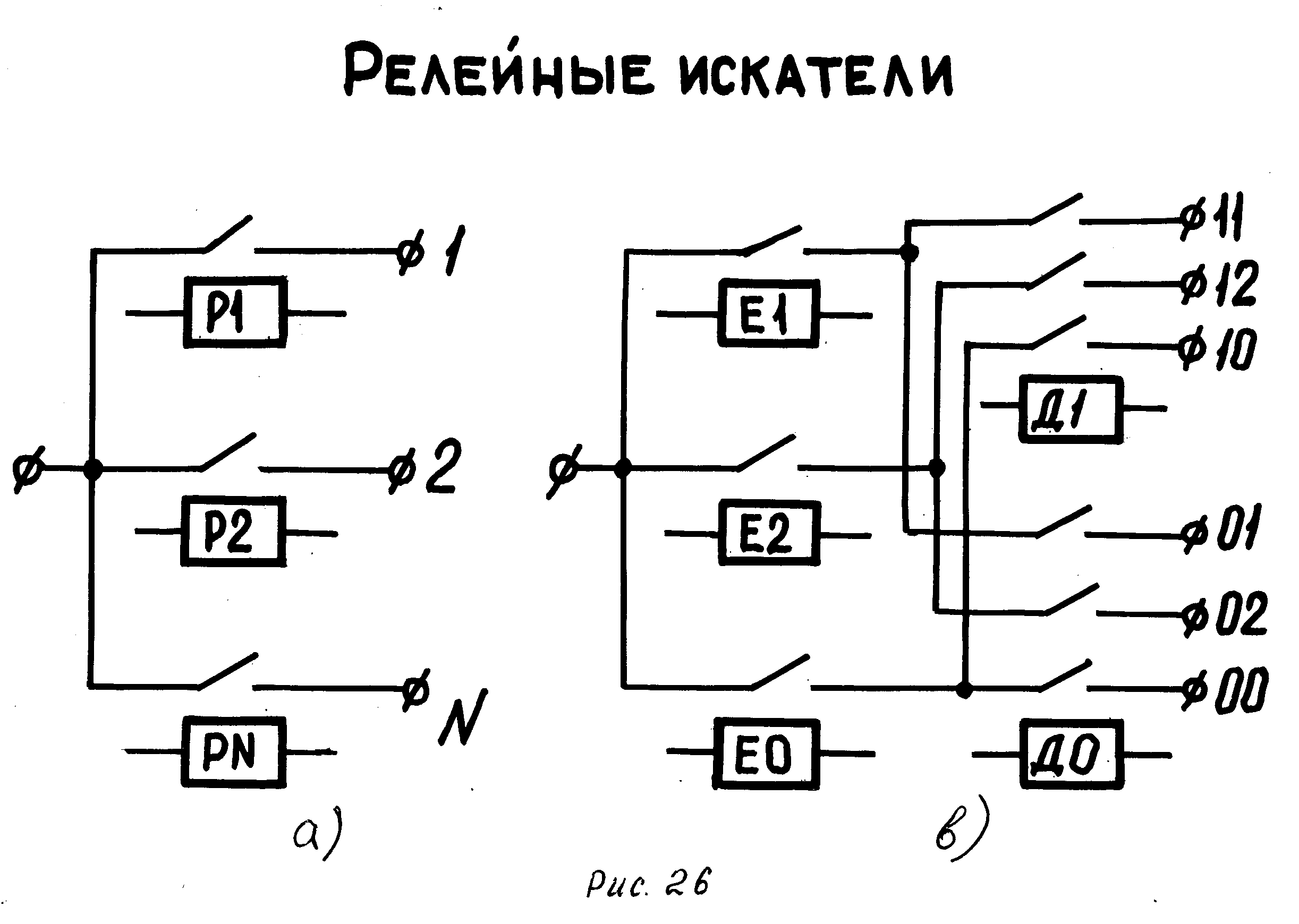 ис.
8.8. Релейные искатели
ис.
8.8. Релейные искатели
Другая конфигурация релейного искателя на 100 линий содержит 10 десятковых реле Д1, Д2, …, Д0 и 10 реле единиц Е1, Е2, …, Е0. Для установления соединения необходимо, чтобы сработало одно реле десятков и одно реле единиц, при этом для 100 линий требуется искатель с 20-ю реле.
Достоинства релейных искателей:
большая надёжность, чем в ДШИ.
высокое быстродействие.
лучший, чем в ДШИ, контакт.
Недостатком является дороговизна релейных искателей, т.к. при увеличении ёмкости станций число реле возрастает пропорционально квадрату ёмкости. Логическим развитием релейных искателей являются многократные координатные соединители.