

6.2. Характеристика режимов движения машин
Анализ динамики машин производится на основе теоремы об изменении кинетической энергии системы: изменение (приращение) кинетической энергии системы на её возможном перемещении равно сумме работ всех внешних и внутренних сил на этом перемещении, то есть
![]() ,
,
где
![]() –кинетическая энергия системы в данный
момент времени;
–кинетическая энергия системы в данный
момент времени;
![]() –
кинетическая энергия системы в последующий
момент времени;
–
кинетическая энергия системы в последующий
момент времени;
![]() –
работа движущих сил при перемещении
системы из
-го
до
–
работа движущих сил при перемещении
системы из
-го
до
![]() -го
положения системы;
-го
положения системы;
![]() –
работа сил сопротивления на том же
перемещении системы. Сумма работ в
правой части равенства называется
избыточной
работой
–
работа сил сопротивления на том же
перемещении системы. Сумма работ в
правой части равенства называется
избыточной
работой
![]() .
.
В зависимости от соотношения величин правой части этого равенства различают следующие режимы (виды) движения машин.
I. Неустановившийся режим
А)
Пуск (разбег).
Этот режим имеет место при соотношении
работ
![]() или
или
![]() .
Тогда в левой части имеет место соотношение
.
Тогда в левой части имеет место соотношение
![]() ,
т. е. кинетическая энергия машины
возрастает, и возрастает угловая скорость
.
Графически это можно представить как
на рис. 6.2.
,
т. е. кинетическая энергия машины
возрастает, и возрастает угловая скорость
.
Графически это можно представить как
на рис. 6.2.
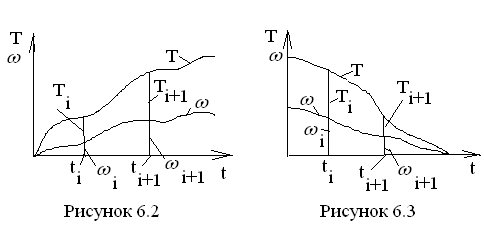
Б).
Остановка
(выбег) имеет
место при обратном соотношении работ,
т. е.
![]() и
и
![]() .
При этом кинетическая энергия машины
убывает, и угловая скорость также
убывает. Графически этот режим представлен
на рис. 6.3. Оба режима не являются рабочими,
так как не могут продолжаться долго.
Режим пуска заканчивается, когда угловая
скорость начинает повторять свои
значения, а режим остановки заканчивается
полной остановкой машины. При исследовании
этих режимов, кроме закона изменения
угловой скорости, определяется время
пуска или, соответственно, остановки.
.
При этом кинетическая энергия машины
убывает, и угловая скорость также
убывает. Графически этот режим представлен
на рис. 6.3. Оба режима не являются рабочими,
так как не могут продолжаться долго.
Режим пуска заканчивается, когда угловая
скорость начинает повторять свои
значения, а режим остановки заканчивается
полной остановкой машины. При исследовании
этих режимов, кроме закона изменения
угловой скорости, определяется время
пуска или, соответственно, остановки.
II.Установившийся режим
А)
Неравновесный.
Режим характеризуется тем, что работа
движущих сил то больше, то меньше работы
сил сопротивления, т. е. в течение цикла
имеют место следующие соотношения
и
.
Но за цикл работы машины эти величины
одинаковы
![]() ,
так что в начале и в конце цикла
,
так что в начале и в конце цикла
![]() .
.
В
результате таких соотношений работ
кинетическая энергия машины и угловая
скорость ведущего звена в течение цикла
изменяются периодически, причём средние
значения как кинетической энергии, так
и угловой скорости остаются постоянными.
Графически характер изменения кинетической
энергии и угловой 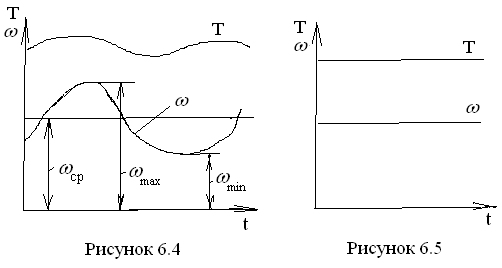 скорости
представлен на рис. 6.4. Средняя угловая
скорость определяется соотношением
скорости
представлен на рис. 6.4. Средняя угловая
скорость определяется соотношением
 .
Величина, характеризующая отклонение
максимальной и минимальной угловой
скорости от её среднего значения,
называется коэффициентом
неравномерности
.
Величина, характеризующая отклонение
максимальной и минимальной угловой
скорости от её среднего значения,
называется коэффициентом
неравномерности
![]() .
Численно коэффициент
равен
.
Численно коэффициент
равен
 .
.
Для поддержания изменения угловой скорости в заданных пределах в машинах применяют маховики, представляющие собой колёса с массивным ободом, устанавливаемые на вал ведущего звена и вращающиеся с его угловой скоростью.
Данный режим является рабочим, так как может продолжаться неопределённо долго. В этом режиме работают все машины циклического действия.
Б)
Равновесный.
Этот режим
имеет место в тех машинах, в которых
работа движущих сил постоянно равна
работе сил сопротивления, т. е.
![]() .
Избыточная работа в течение всего цикла
равна нулю,
.
Избыточная работа в течение всего цикла
равна нулю,
![]() .
Кинетическая энергия и угловая скорость
остаются постоянными (рис. 6.5).
.
Кинетическая энергия и угловая скорость
остаются постоянными (рис. 6.5).
Такой режим работы характерен для ротативных машин.