

6. Динамика машин
Основными задачами этого раздела являются определение фактической угловой скорости ведущего звена и определение момента инерции маховика, необходимого для поддержания изменения угловой скорости в заданных пределах.
6.1. Вспомогательные задачи динамики машин Динамическая модель машины
В
связи с необходимостью упрощения
расчётной схемы и большей наглядности,
а также сокращения расчётов реальную
машину заменяют её моделью, сохраняющей
те свойства машины, которые изучаются
на данном этапе исследования. Такая
модель представляет собой некоторый
условный диск, вращающийся с кривошипом
как одно целое, т. е. с его угловой
скоростью (рис. 6.1), обладающий так
называемым приведённым
моментом инерции.
На этой основе кривошип или другое
ведущее звено, с которым связан условный
диск, называется звеном
приведен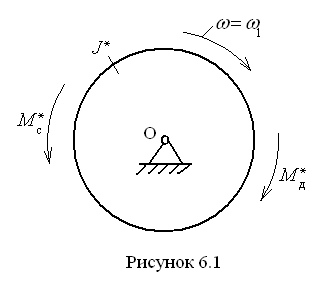 ия.
На диск действуют приведённый
момент движущих сил,
направленный в сторону вращения, и
приведённый
момент сил сопротивления,
направленный навстречу вращению.
ия.
На диск действуют приведённый
момент движущих сил,
направленный в сторону вращения, и
приведённый
момент сил сопротивления,
направленный навстречу вращению.
На
схеме рис. 6.1 обозначены
![]() - приведённый момент инерции механизма,
- приведённый момент инерции механизма,
![]() - приведённый
момент движущих сил и
- приведённый
момент движущих сил и
![]() - приведённый момент сил сопротивления.
- приведённый момент сил сопротивления.
Приведённый момент инерции
Приведённым моментом инерции механизма называется момент инерции условного диска, которым заменяется реальный механизм, обладающего кинетической энергией, равной сумме кинетических энергий всех звеньев механизма.
Кинетическая
энергия условного диска
 ,
где
,
где
![]() ,
т. е. угловая скорость звена приведения,
равная угловой скорости кривошипа.
,
т. е. угловая скорость звена приведения,
равная угловой скорости кривошипа.
Кинетическая
энергия звена, совершающего поступательное
движение,
 ,
где
,
где
![]() – масса звена,
– скорость звена.
– масса звена,
– скорость звена.
Кинетическая
энергия звена, совершающего вращательное
движение,
 ,
где
,
где
![]() – момент инерции звена,
– момент инерции звена,
![]() – угловая скорость звена.
– угловая скорость звена.
Кинетическая
энергия звена в плоскопараллельном
движении
 ,
где
,
где
![]() – масса звена,
– масса звена,
![]() –
скорость центра масс звена,
–
скорость центра масс звена,
![]() –
момент инерции звена относительно его
центра масс,
–
момент инерции звена относительно его
центра масс,
![]() – угловая скорость звена. Согласно
определению имеем:
– угловая скорость звена. Согласно
определению имеем:
![]() .
.
Подставив
сюда записанные выше выражения
кинетических энергий и, решая затем
полученное равенство относительно
![]() ,
запишем
,
запишем
 .
.
Как
видно из этой формулы, приведённый
момент инерции зависит от структуры
механизма, от массовых характеристик
звеньев, от положения механизма и не
зависит от угловой скорости ведущего
звена. Некоторые механизмы имеют
постоянное значение приведённого
момента инерции. Машины, в основе которых
механизмы с
![]() ,
называются ротативными.
,
называются ротативными.
Приведённый момент сил сопротивления
Приведённым моментом сил сопротивления называется момент, приложенный к звену приведения, мгновенная мощность которого равна сумме мгновенных мощностей всех сил сопротивления, действующих в механизме.
Мгновенная
мощность приведённого момента
сопротивления
![]() .
Мгновенная мощность
-той
силы сопротивления
.
Мгновенная мощность
-той
силы сопротивления
![]() .
Согласно определению
.
Согласно определению
![]() ,
поэтому, подставив сюда соответствующие
выражения, получаем
,
поэтому, подставив сюда соответствующие
выражения, получаем
![]() ,
откуда
,
откуда
 .
.
Если среди сил сопротивления имеются моменты, то их можно представить в виде пар сил с плечами, равными длинам соответствующих звеньев.
З а м е ч а н и е . Если во всех математических выражениях заменить силы сопротивления движущими силами, то в результате получится приведённый момент движущих сил:
 .
.
Зависимость приведённых моментов сил от угла поворота, скорости или времени называется механической характеристикой машины.