

Вопрос 36 Оптимальный синтез планетарных механизмов при автоматизированном проектировании
При автоматизированном проектировании с помощью компьютера можно за относительно небольшой промежуток времени получить большое количество возможных решений задачи. Сопоставляя эти решения между собой находят то, которое удовлетворяет всем требованиям наилучшим образом. При этом перебор вариантов осуществляется в пределах заданных ограничений на параметры (в данном случае на числа зубьев колес) по какой-либо стратегии или чаще случайным образом. Программы оптимального синтеза могут использовать рассмотренные выше методы (например, метод сомножителей), а могут просто перебирать допустимые сочетания параметров и проверять их на соответствие заданным условиям. Использование компьютерных программ для синтеза планетарных механизмов позволяет существенно сократить время проектирования и существенно улучшить качественные показатели спроектированных механизмов.
Планетарные механизмы с двумя подвижностями (дифференциалы):
На практике в качестве механизмов с двумя подвижностями наиболее часто применяются планетарные зубчатые механизмы или как их еще называют планетарные дифференциалы. Это название справедливо для механизмов, в которых входной энергетический поток разделяется на два выходных потока. Если входные энергетические потоки суммируются на выходе в один выходной поток, то такие механизмы следует называть суммирующими или интегральными.
Все рассмотренные типовые схемы механизмов можно выполнить с двумя подвижностями. Рассмотрим в качестве примера двухрядный механизм с одним внешним и одним внутренним зацеплением (рис.16.5).
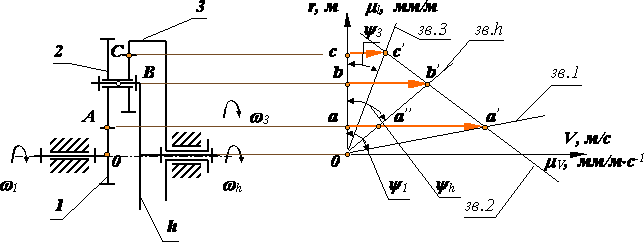
Рис. 16.5
По формуле Виллиса отношение угловых скоростей звеньев для внешнего зацепления колес z2 и z1 (w1 - wh) / (w2 - wh) = - z2 / z1
для внутреннего зацепления колес z4 и z3 (w2 - wh) / (w3 - wh) = z4 / z3 .
Перемножим, правые и левые части этих уравнений, и получим соотношение между угловыми скоростями механизма с двумя подвижностями [(w1 - wh) / (w2 - wh)] [(w2-wh)/ (w3-wh)] = - z2 z4 / ( z1 z3) (w1 - wh) / (w3 - wh) = - z2 z4 / ( z1 z3) = u13(h) u13 (h) w3 - u13 (h) wh = w1 - wh
w1 - ( 1 + u13 (h)) wh - u13 (h) w3 = 0 |
Чтобы из механизма с двумя подвижностями получить одноподвижный механизм необходимо либо остановить одно из подвижных звеньев, либо связать между собой функционально ( например, простой зубчатой передачей ) два подвижных звена. Механизмы, образованные по второму способу, называются замкнутыми дифференциалами. Схема такого механизма приведена на рис.16.6.
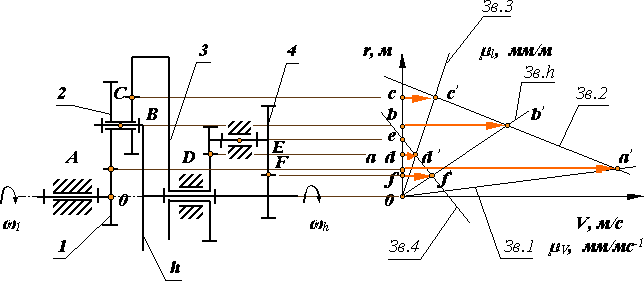
Рис. 16.6
Вопрос 37
Классификация кулачковых механизмов: Кулачковые механизмы классифицируются по следующим признакам:
по расположению звеньев в пространстве
пространственные
плоские
по движению кулачка
вращательное
поступательное
винтовое
по движению выходного звена
возвратно-поступательное ( с толкателем)
возвратно-вращательное ( с коромыслом)
по наличию ролика
с роликом
без ролика
по виду кулачка
дисковый (плоский)
цилиндрический
коноид (сложный пространственный)
по форме рабочей поверхности выходного звена
плоская
заостренная
цилиндрическая
сферическая
эвольвентная
по способу замыкания элементов высшей пары
силовое
геометрическое
При силовом замыкании удаление толкателя осуществляется воздействием контактной поверхности кулачка на толкатель (ведущее звено - кулачок, ведомое - толкатель). Движение толкателя при сближении осуществляется за счет силы упругости пружины или силы веса толкателя, при этом кулачок не является ведущим звеном. При геометрическом замыкании движение толкателя при удалении осуществляется воздействием наружной рабочей поверхности кулачка на толкатель, при сближении - воздействием внутренней рабочей поверхности кулачка на толкатель. На обеих фазах движения кулачок ведущее звено, толкатель - ведомое.
|
|
Кулачковый механизм с силовым замыканием высшей пары |
Кулачковый механизм с геометрическим замыканием высшей пары |
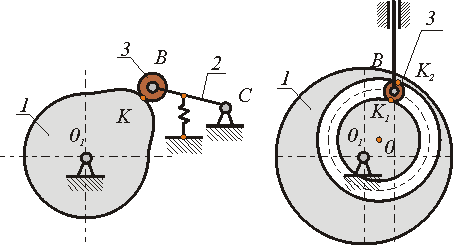
Рис. 17.1