

Вопрос 1 Способы пуска двигателей постоянного тока (дпт).
Прямой пуск ДПТ( для двигателей до 1 кВт)

Mвр=kIяФ
Iя- ток якоря
Ф- магнитный поток статора
Мвр- вращающий момент ДПТ
k- конструктивный коэффициент
Iя=U-E/Rя E=kФѠ
Iя - ток якоря Ѡ[рад/сек]-скорость вращения
U-приложенное напряжение
E- ЭДС
Rя- Сопротивление обмоток якоря
В момент пуска Ѡ=0, значит и Е=0, следовательно Iя=U/Rя

Реостатный пуск ДПТ ( введение пусковых сопротивлений в цепь якоря)
Iя пуск =U/Rя - Rпуск


Пуск ДПТ на пониженном напряжении ( по системе Г-Д)
 Iя=U/Rя
Iя=U/Rя

Ег=kФѠ
Uг= Ег- Iя Rя
Вопрос 2 Способы регулирования дпт.
Ѡхх=f(Mвр)
Ѡ=f(M)
M=Mвр-Mc Mc-момент сопротивления(создается механизмами)
2.1 При изменении тока в обмотке якоря- введении регулировочных сопротивлений в цепь обмотки якоря.

Происходит
изменение скорости вращения под
нагрузкой, а скорость холостого хода(
без нагрузки) остаётся  постоянной.
постоянной.
2.2 При изменении магнитного потока- введении регулировочных сопротивлений в цепь ОВ.

Регулирование
скорости вращения ДПТ- при малой нагрузке ( 0- М кр) скорость возрастает,
при нагрузке больше М кр – уменьшается.
нагрузке ( 0- М кр) скорость возрастает,
при нагрузке больше М кр – уменьшается.
2.3 При изменении подводимого напряжения ( система Г-Д).


( Введение регулировочных сопротивлений в НОВГ). Уменьшается скорость вращения ДПТ как при постоянной нагрузке, так и на ХХ.
Вопрос 3 Способы торможения дпт.
3.1 Динамическое торможение.
Динамическое торможение электродвигателя постоянного тока осуществляется путем замыкания обмотки якоря двигателя накоротко или через резистор. При этом электродвигатель постоянного тока начинает работать как генератор, преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
При
отключении обмотки 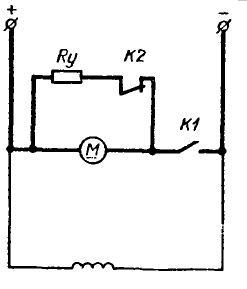 якоря
от напряжения якорь по инерции продолжает
вращаться в магнитном поле статора, в
его обмотке наводится ЭДС , вследствие
чего при замыкании К2 по якорной обмотке
и тормозному сопротивлению пройдет
тормозной ток, который создаст тормозной
момент , направленный на встречу вращения
якоря.
якоря
от напряжения якорь по инерции продолжает
вращаться в магнитном поле статора, в
его обмотке наводится ЭДС , вследствие
чего при замыкании К2 по якорной обмотке
и тормозному сопротивлению пройдет
тормозной ток, который создаст тормозной
момент , направленный на встречу вращения
якоря.
3.2 Торможение противовключением.
осуществляется подключением двигателя на вращение в одну сторону, но под действием внешних сил или по инерции его якорь вращается в противоположную сторону. Этот способ торможения применяется для ограничения скорости опускания тяжелых грузов и для быстрой остановки электродвигателя с последующим его реверсированием.
Торможение противовключением получается, например, если электродвигатель грузоподъемного механизма включен на подъем груза, а его якорь под действием статического момента, создаваемого массой груза, вращается в сторону спуска груза. В этом случае момент, развиваемый электродвигателем, будет являться тормозным моментом, а э. д. с. Е, наводимая в обмотке якоря, будет совпадать по направлению с напряжением сети и ток, протекающий по якорной цепи в режиме торможения противовключением, определяется по формуле
![]()
Для ограничения тока до значения, допустимого по условиям коммутации, в цепь якоря двигателя необходимо включить тормозной резистор Rу, сопротивление которого примерно в два раза больше сопротивления пускового резистора, так как в начале торможения противовключением E≈U.
Недостаткам торможения противовключением является его неэкономичность, а мягкие механические тормозные характеристики не обеспечивают стабильной работы электродвигателя.
3.3 Рекуперативное торможение.
Рекуперативное торможение, или торможение с отдачей энергии в сеть, происходит при угловой скорости электродвигателя Ѡ, превышающей его угловую скорость Ѡ0 при идеальном холостом ходе, т. е. Ѡ>Ѡ0. В этом случае э. д. с. якоря Е=kФѠ превысит приложенное напряжение U и ток в обмотке якоря IЯ=((U—E)/rя изменит направление, т. е. двигатель перейдет в генераторный режим с отдачей энергии в сеть, создавая при этом тормозной момент.
Рекуперативное торможение применяется только для двигателей параллельного и смешанного возбуждения в электроприводах грузоподъемных механизмов при опускании тяжелого груза со скоростью, превышающей скорость идеального холостого хода.
К недостатку рекуперативного торможения относится высокая угловая скорость торможения Ѡ>Ѡ0, поэтому этот способ торможения не может быть применен для остановки электропривода.