

1. Области применения и свойства
Магнитоэлектрические приборы применяются в качестве:
амперметров и вольтметров для измерения токов и напряжений в цепях постоянного тока (для этих целей приборы других групп используют в редких случаях);
омметров;
гальванометров постоянного тока, используемых в качестве нулевых индикаторов, а также для измерения малых токов. и напряжений;
баллистических гальванометров, применяемых для измерений малых количеств электричества;
5) приборов для измерений в цепях переменного тока:
а) осциллографических гальванометров, применяемых для наблюдения и записи быстропротекающих процессов;
6) вибрационных гальванометров, используемых в основном в качестве нулевых индикаторов переменного тока в постоянный;
в) выпрямительных, термоэлектрических и электронных приборов, содержащих преобразователь переменного тока в постоянный.
По разнообразию применения, количеству различных типов и высоким метрологическим характеристикам магнитоэлектрические приборы занимают первое место среди всех групп электромеханических приборов. Магнитоэлектрические приборы выпускают до класса точности 0,1 , а по чувствительности с током полного отклонения до 0,1 мкА (при классе точности 1,5).
2. Устройство и принцип действия
В магнитоэлектрических механизмах для перемещения подвижной части используется энергия магнитного поля системы, состоящей из одного или нескольких постоянных магнитов и одного или нескольких контуров с токами.
Основными деталями измерительного механизма являются постоянный магнит, магнитопровод и подвижная катушка (рамка), обтекаемая током.
Существуют следующие конструктивные разновидности I магнитоэлектрических механизмов: а) между полюсами постоянного магнита установлена и может поворачиваться вокруг оси подвижная катушка (рамка), обтекаемая током (приборы с внешним магнитом); б) постоянный магнит, установлен (внутри катушки, которая может поворачиваться вокруг магнита (приборы с внутрирамочным магнитом); в) подвижный постоянный магнит установлен на оси внутри неподвижной катушки (приборы с подвижным магнитом) .
Наиболее широкое распространение получили механизмы первого вида — с внешним магнитом. Устройство такого механизма схематически показано на рис. 1 Сильный постоянный магнит 1 из высококоэрцитивной стали скреплен с магнитопроводом 2 и полюсными наконечниками 3 из магнитномягкой стали. Между полюсными наконечниками укреплен цилиндрический сердечник 4 тоже из магнитно-мягкой стали. Путем цилиндрической обточки сердечника и полюсных наконечников и их точной центровки в воздушном зазоре магнитопровода создается практически равномерное и радиальное магнитное поле почти для всего угла охвата сердечника полюсными наконечниками.
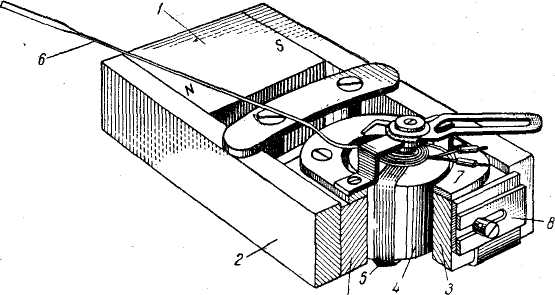
Рис. 1. Устройство магнитоэлектрического механизма с внешним
магнитом.
Подвижная катушка (рамка) 5 из топкого медного или алюминиевого провода намотана на легкий алюминиевый каркас и установлена на опорах таким образом, что может поворачиваться вокруг сердечника в магнитном поле воздушного зазора.
При установке подвижной части на опорах к обмотке рамки приклеиваются специальным лаком алюминиевые буксы с кернами. В щитовых приборах ось подвижной части 'большей частью располагается горизонтально, а в переносных приборах вертикально. При вертикальном расположении оси почти вся нагрузка сосредоточена на одной нижней опоре, и трение получается значительно меньше, однако в этом случае необходима более тщательная обработка поверхности кернов и подпятников.
На оси укреплена стрелка 6, конец которой перемещается над шкалой. Для уравновешивания подвижной части служат грузики 7 .
Важной деталью механизма является магнитный шунт - стальная пластинка 8, перекрывающая .полюсные наконечники, через которую проходит часть (5—10%) магнитного потока. Перемещая пластинку, можно менять величину ответвляемого в нее потока и тем самым изменять в некоторых пределах индукцию в воздушном зазоре. Таким путем можно регулировать номинальный угол отклонения подвижной части и производить подгонку пределов измерения.
Успокоение колебаний подвижной части создается, с одной стороны, при помощи токов, индуктированных в короткозамкнутом контуре алюминиевого каркаса рамки, при его перемещении в магнитном поле воздушного зазора, а с другой стороны, при помощи токов от индуктированной в обмотке рамки при том же перемещении э. д. с, если обмотка замкнута на какое-либо сопротивление внешней цепи (электромагнитное успокоение). Кроме того, некоторое успокаивающее действие оказывает трение подвижной части о воздух. Для большинства показывающих приборов основное значение имеет каркасное успокоение, нужную величину которого можно получить, подогнав соответствующим образом электрическое сопротивление каркаса, для чего в нем иногда делают специальные отверстия (перфорацию) . Обмоточное успокоение у показывающих приборов имеет значение, если только сопротивление цепи, на которое замкнута обмотка рамки, невелико, как, например, у амперметров с шунтами.
В механизмах высокой чувствительности (гальванометрах) рамки делают обычно бескаркасными, и поэтому здесь основное значение имеет успокоение от индуктированных в обмотке токов. Для усиления успокоения иногда на бескаркасные рамки надевают дополнительные короткозамкнутые витки.
При протекании по обмотке рамки постоянного тока в результате взаимодействия тока с магнитным полем в воздушном зазоре возникает вращающий момент, под действием которого рамка поворачивается. Для создания противодействующего момента и одновременно для подвода тока в обмотку рамки служат две спиральные пружины. Одним концом пружины закреплены на оси, .вторым концом одна пружина прикреплена к стойке прибора, а другая к поводку корректора.
Одним из самых ответственных узлов магнитоэлектрического механизма является его магнитная система: постоянный магнит, сердечник, магнитопровод и полюсные
наконечники. Магнитная индукция в воздушном зазоре не должна меняться с течением времени, на нее не должны оказывать заметное влияние внешние магнитные поля, колебания температуры, механические толчки и т. п. Чем выше индукция в зазоре, тем больше будет вращающий момент прибора и тем больше его чувствительность. Таким требованиям могут удовлетворять магниты, изготовленные из высококачественных сталей с большой остаточной индукцией и коэрцитивной силой.


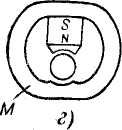

Рис. 2. Различные конструкции магнитного узла магнитоэлектрического механизма.
До недавнего времени для изготовления постоянных магнитов почти исключительно применялись вольфрамовые и хромистые стали, обеспечивающие индукцию в воздушном зазоре порядка 1 000—1 200 гс. С появлением новых, более качественных никельалюминийкобальтовых сталей (типа альни, альнико, магнико) с большей удельной магнитной энергией, позволяющих получить индукцию в зазоре до 2 000—3 000 гс, конструкции и технология изготовления магнитоэлектрических механизмов существенно изменились. Размеры и вес магнитов, а следовательно, и габариты приборов значительно уменьшились. Появились новые конструкции механизмов с внутрирайонным магнитом, с подвижным магнитом и новые типы малогабаритных приборов. Распространенная раньше подковообразная форма магнита, требующая много места и материала, теперь не применяется. Примеры некоторых современных конструкций показаны на рис. 2.
Магниты типа а изготовляются из хромистой стали; в конструкциях б, в, г, д, е, ж применены магниты из никельалюминийкобальтовых сплавов. Магниты из этих сплавов ввиду их большой твердости обработке режущим инструментом не поддаются. Их изготовляют простой геометрической формы (параллелепипед, цилиндр) путем отливки с последующей шлифовкой рабочих поверхностей. Благодаря значительно большей удельной магнитной энергии магниты из таких высококоэрцитивных сплавов при той же индукции в воздушном зазоре можно делать намного короче, чем магниты из хромистой или вольфрамовой стали, как это видно из рис. 2, что позволяет уменьшить габариты всего механизма. Остальная часть магнитопровода делается из магнитномягких материалов.
Конструкции г, д, е и ж благодаря магнитопроводу М, охватывающему измерительный механизм со всех сторон, меньше других подвержены внешним магнитным влияниям. В последнее время находят широкое применение, особенно в щитовых приборах, конструкции е и ж с внутри-рамочным магнитом. Как видно из рис. 2,е и ж, в этих механизмах сердечником является магнит, охваченный снаружи кольцевым магнитопроводом из магнитномягкой стали.
Недостатком конструкций с внутрирамочным магнитом является то, что индукция в воздушном зазоре вследствие неодинаковой длины пути магнитных силовых линий на различных участках магнита распределяется по закону синуса, и шкала прибора получается неравномерной. Для выравнивания индукции применяют различные способы: например, придают магниту специальную форму или снабжают его полюсными накладками из магнитномягкой стали (рис. 2,ж).
В механизмах с внутрирамочным магнитом расходуется значительно меньшее количество магнитных материалов по сравнению с механизмами других типов и несравненно лучше используется энергия магнита, что является их преимуществом. Такие механизмы можно выполнять очень небольшого размера, благодаря чему оказалось возможным выпускать новые типы миниатюрных приборов с диаметром корпуса 40 мм и меньше.
Кроме рассмотренных выше, существуют механизмы, позволяющие получать углы отклонения подвижной части до 240° и более. Такие механизмы, называемые униполярными или односторонними, имеют рамку, расположенную по одну сторону оси, как это видно на рис. 10, так что рабочей стороной в рамке является только одна, перемещающаяся в воздушном зазоре. Вторая сторона рамки в отличие от обычных механизмов в создании вращающего момента не участвует. Магнит 1 (рис. 3) такого прибора, установленный на плате 2 из магнигномягкого материала, имеет форму незамкнутого кольца и намагничен в вертикальном направлении. Сердечник с дуговой накладкой 3 установлен на той же плате 2. Рамка 4 перемещается в воздушном зазоре 5. Корректор 6 расположен внизу.
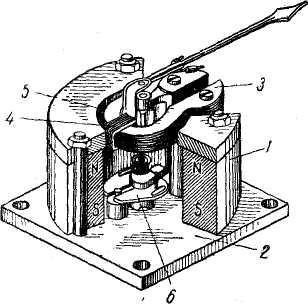
Рис. 3 Односторонний механизм с углом шкалы 240о
В односторонних механизмах при той же длине шкалы, что и у механизмов с углом отклонения 90°, можно получить меньшие габариты прибора, а при одинаковых механизмах — большую точность отсчета.
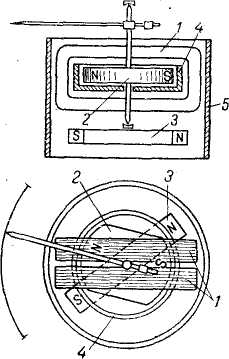
Магнитоэлектрический механизм с подвижным магнитом схематически показан на рис. 4. Внутри неподвижной катушки 1, обтекаемой измеряемым током, помещается укрепленный на оси подвижный магнит 2, имеющий обычно форму диска, срезанного по краям и намагниченного по диаметру.
В магнитном поле катушки подвижный магнит стремится занять такое положение, при котором его ось намагничивания будет совпадать с направлением поля, в результате чего и возникает вращающий момент. Для получения противодействующего момента применяют или спиральную пружину, или, что чаще встречается, неподвижный постоянный магнит 3, поле которого действует на подвижный магнит. Подвижный и неподвижный магниты изготовляются из высококоэрцитивных сплавов альни, альнико и др. или отливкой, или путем прессования из порошкообразных материалов.
Для успокоения колебаний подвижной части применяют медный или алюминиевый стакан 4; при движении магнита в стенках стакана индуктируются токи, создающие тормозные силы. В ряде конструкций такие успокоители выполняются в виде камеры, служащей одновременно основой для крепления прочих деталей механизма: катушки, неподвижного магнита, подпятников и др.
Для защиты механизма от влияния внешних магнитных полей применяют экран 5 из сплавов с высокой магнитной проницаемостью (типа пермаллоя).
.
Рис. 4 Механизм с подвижным магнитом
К недостаткам описанных механизмов относятся сравнительно большой вес, а следовательно, и 'большая инерция подвижной части, кроме того, они заметно уступают механизмам с подвижной рамкой по чувствительности, но зато выгодно отличаются простотой конструкции, устойчивостью к перегрузкам (ток к подвижной части не подводится), малыми габаритами и весом. Широкое применение такие механизмы находят в авиационном и автотракторном электрооборудовании.