

№1.1
Материальная
точка
— тело, форма и размеры которого
несущественны в условиях данной
задачи.Т![]() раектория
— это линия в пространстве, вдоль которой
движется частица (геометрическое место
концов
радиуса-вектора частицы). Длиной
пути
точки называется сумма длин всех
участков траектории, пройденных этой
точкой за рассматриваемый промежуток
времени.
раектория
— это линия в пространстве, вдоль которой
движется частица (геометрическое место
концов
радиуса-вектора частицы). Длиной
пути
точки называется сумма длин всех
участков траектории, пройденных этой
точкой за рассматриваемый промежуток
времени.
![]() Перемещение
—
вектор,
проведенный из начального в конечное
положение частицы.
Перемещение
—
вектор,
проведенный из начального в конечное
положение частицы.
![]() Система
отсчета
— совокупность системы координат и
часов, связанных с телом отсчета.
Скорость
— это векторная величина, которая
определяет как быстроту движения, так
и его направление в данный момент
времени.
Система
отсчета
— совокупность системы координат и
часов, связанных с телом отсчета.
Скорость
— это векторная величина, которая
определяет как быстроту движения, так
и его направление в данный момент
времени.
![]() Вектором
средней скорости
за интервал времени Dt
называется отношение приращения Dr
радиуса-вектора точки к промежутку
времени Dt
Мгновенная
скорость
— векторная величина, равная первой
производной по времени от радиуса-вектора
r рассматриваемой точки
Вектором
средней скорости
за интервал времени Dt
называется отношение приращения Dr
радиуса-вектора точки к промежутку
времени Dt
Мгновенная
скорость
— векторная величина, равная первой
производной по времени от радиуса-вектора
r рассматриваемой точки![]() Ускорение
— это векторная величина, характеризующая
быстроту изменения скорости по модулю
и направлению.
Ускорение
— это векторная величина, характеризующая
быстроту изменения скорости по модулю
и направлению.
![]() Среднее
ускорение
в интервале времени Dt
— векторная величина, равная отношению
изменения скорости Dv
интервалу времени Dt
Мгновенное
ускорение
материальной точки — векторная
величина равная первой производной
по времени скорости рассматриваемой
точки (второй производной по времени
от радиуса-вектора этой же точки).
Среднее
ускорение
в интервале времени Dt
— векторная величина, равная отношению
изменения скорости Dv
интервалу времени Dt
Мгновенное
ускорение
материальной точки — векторная
величина равная первой производной
по времени скорости рассматриваемой
точки (второй производной по времени
от радиуса-вектора этой же точки).
![]()
![]()
![]()
Тангенциальное ускорение характеризует быстроту изменения скорости по модулю. Величину тангенциального ускорения - в смысле проекции вектора ускорения на единичный касательный вектор траектории - можно выразить так:
![]()
где ![]() -
путевая скорость вдоль траектории,
совпадающая с абсолютной величиной
мгновенной скорости в данный момент.
-
путевая скорость вдоль траектории,
совпадающая с абсолютной величиной
мгновенной скорости в данный момент.
Если
использовать для единичного касательного
вектора обозначение ![]() ,
то можно записать тангенциальное
ускорение в векторном виде:
,
то можно записать тангенциальное
ускорение в векторном виде:
![]()
Нормальное
ускорение
(центростремительное) направлено по
нормали к траектории к центру ее
кривизны O
и характеризует быстроту
изменения направления вектора скорости
точки.
![]()
![]()
![]()
![]()
![]() Линейная
скорость точки связана с угловой
скоростью и радиусом траектории
соотношением:
поступательное
движение.
При поступательном движении любая
прямая, жестко связанная с движущимся
телом, остается параллельной
своему начальному положению. вращение
вокруг неподвижной оси.
Вращением
вокруг неподвижной оси называется
движение, при котором существуют по
крайней мере две неподвижные точки
тела.
плоское
движение.
При
плоском движении траектория каждой
точки твердо- твердого тела расположена
в некоторой фиксированной плоскости и
плоскости движения всех точек параллельны
между собой (иначе говоря, все точки
тела движутся в параллельных плоскостях).
вращение
вокруг неподвижной точки.
Вращением
вокруг неподвижной точки называют
движение твердого тела, если существует
только одна точка тела, скорость которой
в любой момент времени равна нулю
скорость. Движение твердого тела,
имеющего одну неподвижную точку,
представляет собой вращение вокруг
проходящей через эту точку мгновенной
оси (мгновенное вращение).
свободное
движение.
При свободном движении никаких
кинематических ограничений на движение
твердого тела не накладывается.
Линейная
скорость точки связана с угловой
скоростью и радиусом траектории
соотношением:
поступательное
движение.
При поступательном движении любая
прямая, жестко связанная с движущимся
телом, остается параллельной
своему начальному положению. вращение
вокруг неподвижной оси.
Вращением
вокруг неподвижной оси называется
движение, при котором существуют по
крайней мере две неподвижные точки
тела.
плоское
движение.
При
плоском движении траектория каждой
точки твердо- твердого тела расположена
в некоторой фиксированной плоскости и
плоскости движения всех точек параллельны
между собой (иначе говоря, все точки
тела движутся в параллельных плоскостях).
вращение
вокруг неподвижной точки.
Вращением
вокруг неподвижной точки называют
движение твердого тела, если существует
только одна точка тела, скорость которой
в любой момент времени равна нулю
скорость. Движение твердого тела,
имеющего одну неподвижную точку,
представляет собой вращение вокруг
проходящей через эту точку мгновенной
оси (мгновенное вращение).
свободное
движение.
При свободном движении никаких
кинематических ограничений на движение
твердого тела не накладывается.
Механи́ческим движе́нием тела называется изменение его положения в пространстве относительно других тел с течением времени. При этом тела взаимодействуют по законам механики.
Раздел механики, описывающий геометрические свойства движения без учёта причин, его вызывающих, называется кинематикой.
При рассмотрении любого движения (в том числе, механического) в основу классификации видов движений должны быть положены свойства выбранных координат состояния форм движения
Прямолинейная форма движения тела, координатой состояния которой является линейное перемещение центра масс тела dl. Прямолинейная форма движения тела − это предельный случай вращательной формы движения при кривизне траектории, стремящейся к нулю.
Вращательная форма движения тела, координатой состояния которой является аксиальный вектор угла поворота dφrot . Эта форма движения относится только к вращению телав целом. При рассмотрении этой формы движения не рассматривается самостоятельное движение отдельных частей тела, и ось вращения считается проходящей через неподвижный относительно системы отсчета центр масс. По этой причине говорить следует только об угле поворота тела. 3. Орбитальная форма движения тела по криволинейной траектории, каждая из точек которой имеет свой радиус кривизны R, равный радиусу окружности, соприкасающейся с этой точкой. Эта форма движения даже в простейшем случае, когда центр соприкасающейся окружности О совмещается с центром системы отсчета, состоит из сочетания 4-х форм движения: двух прямолинейных (движения вдоль радиуса кривизны и перпендикулярно к нему) и двух вращательных (вращения движущегося тела вокруг собственного центра вращения и вращения радиуса кривизны вокруг центра кривизны О). Соответственно, имеются и 4 координаты состояния.
№1.2
Зако́ны Ньюто́на — три закона, лежащие в основе классической механики и позволяющие записать уравнения движения для любой механической системы, если известны силовые взаимодействия для составляющих её тел
Существует система отсчета, называемая инерциальной, в которой не подверженное внешним воздействиям тело (материальная точка) находится в состоянии покоя, либо движется равномерно и прямолинейно. 1 закон ньютона можно по другому сказать Инертность- это свойство тела оказывать сопротивление при попытках привести его в движение или изменить величину и направление его скорости. Масса есть мера инертности тела.
Сила — векторная величина, являющаяся мерой механического действия на тело со стороны других тел или полей, в результате которого тело приобретает ускорение или изменяет форму и размеры. Векторная величина p, равная произведению массы материальной точки на ее скорость, и имеющая направление скорости, называется импульсом, или количеством движения, этой материальной точки.
Второй закон Ньютона
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этого ускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта (ИСО).
![]() где
где ![]() — ускорение материальной
точки;
— ускорение материальной
точки;
![]() — сила,
приложенная к материальной
точке;
— сила,
приложенная к материальной
точке;
![]() — масса материальной
точки.
— масса материальной
точки.
Третий закон Ньютона-действию всегда есть равное и противоположное противодействие, иначе, взаимодействия двух тел друг на друга между собой равны и направлены в противоположные стороны.
Сила в механике - величина, являющаяся мерой механического действия на данное материальное тело других тел. Это действие вызывает изменение скоростей точек тела или его деформацию и может иметь место как при непосредственном контакте (давления прижатых друг к другу тел, трение), так и через посредство создаваемых телами полей (поле тяготения, электромагнитное поле).
Ускорение,
приобретаемое
материальной точкой (телом), пропорционально
вызывающей его силе, совпадает с ней по
направлению и обратно пропорционально
массе материальной точки (тела).
![]()
![]()
Скорость
изменения импульса материальной точки
равна действующей на нее силе. Векторная
величина Fdt
называется
элементарным
импульсом сил F
за малое время dt
ее действия.
Всякое
действие материальных точек (тел)
друг на друга имеет характер
взаимодействия; силы с которыми
действуют друг на друга материальные
точки, всегда равны по модулю,
противоположно направлены и действуют
вдоль прямой, соединяющей эти точки.
Эти силы приложены к разным материальным
точкам (телам), всегда действуют парами
и являются силами одной природы.
![]()
№1.3
Внутренними силами называются силы взаимодействия между частями рассматриваемой системы. Механическая система называется замкнутой, или изолированной, системой, если она не взаимодействует
![]()
![]()
![]()
![]()
![]()
с внешними телами (на
нее не
действуют
внешние
силы).
Импульс
замкнутой системы не изменяется с
течением времени (сохраняется).
![]() Центром
масс (или
центром
инерции)
системы материальных точек
называется воображаемая точка C,
положение которой характеризует
распределение
массы этой системы, где
mi
и
ri
—
соответственно масса и радиус-вектор
i
-й
материальной точки;
n
—
число материальных точек в
системе.
Центром
масс (или
центром
инерции)
системы материальных точек
называется воображаемая точка C,
положение которой характеризует
распределение
массы этой системы, где
mi
и
ri
—
соответственно масса и радиус-вектор
i
-й
материальной точки;
n
—
число материальных точек в
системе.
![]()
![]() Закон
движения центра масс:
центр масс системы движется как
материальная точка, в которой сосредоточена
масса всей системы и на которую действует
сила, равная геометрической сумме всех
внешних сил, действующих на систему.
Закон
движения центра масс:
центр масс системы движется как
материальная точка, в которой сосредоточена
масса всей системы и на которую действует
сила, равная геометрической сумме всех
внешних сил, действующих на систему.
![]()
![]()
Из закона сохранения импульса следует, что центр масс замкнутой системы либо движется прямолинейно и равномерно, либо остается неподвижным.
![]()
![]()
Зако́н сохране́ния и́мпульса утверждает, что векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
закон сохранения импульса описывает одну из фундаментальных симметрий, — однородность пространства.т.е. означает, что нет такой точки в пространстве, относительно которой существует некоторая «выделенная» симметрия, все точки равноправны, поэтому рассматриваемый эксперимент не зависит от нашего выбора точки отсчета.
Уравнение Мещерского — основное уравнение в механике тел переменной массы, полученное И. В. Мещерским для материальной точки переменной массы (состава)
Уравнение обычно записывается в следующем виде:
![]() ,
,
где:
m — масса материальной точки переменной массы , меняющаяся за счет обмена частицами с окружающей средой;
 —
скорость
движения материальной
точки переменной массы ;
—
скорость
движения материальной
точки переменной массы ; —
внешние
силы, действующие на материальную
точку переменной массы со
стороны ее внешнего окружения (в том
числе, если такое имеет место, и со
стороны среды с которой она обменивается
частицами, например, электромагнитные
силы —
в случае массообмена с магнитной средой,
сопротивление среды движению и т. п.);
—
внешние
силы, действующие на материальную
точку переменной массы со
стороны ее внешнего окружения (в том
числе, если такое имеет место, и со
стороны среды с которой она обменивается
частицами, например, электромагнитные
силы —
в случае массообмена с магнитной средой,
сопротивление среды движению и т. п.); —
относительная
скорость присоединяющихся частиц;
—
относительная
скорость присоединяющихся частиц; —
относительная
скорость отделяющихся частиц;
—
относительная
скорость отделяющихся частиц; ,
,  —
скорости массообмена присоединяющихся
и отделяющихся частиц;
—
скорости массообмена присоединяющихся
и отделяющихся частиц;
Формула Циолковского может быть получена как результат решения этого уравнения.
Уравнение
Мещерского является следствием законов
механики Ньютона (в частности, второго
закона Ньютона,
который был постулирован Ньютоном для
материальной точки постоянной
массы — ![]() , m=Const)
и ряда допущений (см. вывод) о процессе
движения материальной
точки переменной массы .
При этом величина :
, m=Const)
и ряда допущений (см. вывод) о процессе
движения материальной
точки переменной массы .
При этом величина :
![]()
называется «реактивной силой».
№1.4
Моментом силы F относительно неподвижной точки O называется физическая величина, определяемая векторным произведением радиуса-вектора r, проведенного из точки
O в
точку A
приложения
силы, на силу F
(мера действия силы).
![]()
![]()
![]()
Моментом
импульса (количества
движения) материальной
точки A
относительно
неподвижной точки O
называется
физическая величина, определяемая
векторным произведением.
![]()
![]()
![]()
![]()
Момент импульса замкнутой системы сохраняется, т.е. не изменяется с течением времени.
![]()
![]()
![]()
Если
на материальную точку действует сила
вида ![]() ,
то говорят, что материальная точка
находится в поле центральных сил, если
начало координат совпадает с центром
сил. Момент
,
то говорят, что материальная точка
находится в поле центральных сил, если
начало координат совпадает с центром
сил. Момент ![]() центра
сил
центра
сил ![]() относительно
центра сил
относительно
центра сил ![]() равен
0, следовательно, движение в центральном
поле момент импульса материальной точки
остается постоянным. Материальная
точка, движущаяся в поле центральных
сил, это консервативная система, поэтому
сохраняется полная механическая
энергия
равен
0, следовательно, движение в центральном
поле момент импульса материальной точки
остается постоянным. Материальная
точка, движущаяся в поле центральных
сил, это консервативная система, поэтому
сохраняется полная механическая
энергия ![]() .
Для гравитационного
центрального поля
большой массы
имеем:
.
Для гравитационного
центрального поля
большой массы
имеем: ![]() .
В этом случае траекторией материальной
точки является эллипс, один из фокусов
которого совпадает с центром силы, т.е.
положением центра масс. При
.
В этом случае траекторией материальной
точки является эллипс, один из фокусов
которого совпадает с центром силы, т.е.
положением центра масс. При ![]() траекторией
частицы является парабола, при
траекторией
частицы является парабола, при ![]() гипербола.
гипербола.
№1.5
Энергия
—
это
универсальная мера различных форм
движения и взаимодействия. механи́ческая
эне́ргия описывает
сумму потенциальной и кинетической
энергии,
имеющихся в компонентах механической
системы.
Механическая энергия —
это энергия, связанная с движением
объекта или его положением, способность
совершать механическую работу.Работа
силы —
это
количественная характеристика процесса
обмена энергией между взаимодействующими
телами.
![]()
![]()
![]()
![]()
Мощность N равна скалярному произведению вектора силы на вектор скорости, с которой движется точка приложения этой силы. Кинетическая энергия механической системы (K) — это энергия механического движения этой системы. Теорема о кинетической энергии для системы: при переходе системы частиц из произвольного начального в произвольное конечное положение работа А всех приложенных к частицам сил равна приращению DT кинетической энергии системы.
![]()
![]()
![]()
Теорема Кенига: кинетическую энергию K системы частиц можно представить как сумму двух слагаемых: а) кинетической энергии mVc2/2 воображаемой материальной точки, масса которой равна массе всей системы, а скорость совпадает со скоростью центра масс; б) кинетической энергии Kотн системы частиц, вычисленной в системе центра масс.
№1.6
П![]()
![]() отенциальная
энергия (W)
—
механическая энергия системы тел,
определяемая их взаимным расположением
и характером сил взаимодействия между
ними. Потенциальная энергия системы
является функцией
состояния системы.
Она зависит только
от конфигурации системы и
ее положения по отношению к внешним
телам.
отенциальная
энергия (W)
—
механическая энергия системы тел,
определяемая их взаимным расположением
и характером сил взаимодействия между
ними. Потенциальная энергия системы
является функцией
состояния системы.
Она зависит только
от конфигурации системы и
ее положения по отношению к внешним
телам.
![]() Потенциальное
поле
—
поле, в котором работа, совершаемая
силами при перемещении тела из одного
положения в другое, не зависит от того,
по какой траектории это перемещение
произошло, а зависит только от начального
и конечного положений.
Потенциальное
поле
—
поле, в котором работа, совершаемая
силами при перемещении тела из одного
положения в другое, не зависит от того,
по какой траектории это перемещение
произошло, а зависит только от начального
и конечного положений.
![]()
![]()
![]()
![]() Работа
не зависит
от траектории перемещения, а определяется
только начальным и конечным положениями
тела.
Работа
не зависит
от траектории перемещения, а определяется
только начальным и конечным положениями
тела.
![]()
![]()
![]() Потенциалом
поля тяготения
в данной точке поля называется скалярная
величина, равная отношению потенциальной
энергии материальной точки, помещенной
в рассматриваемую точку поля, к массе
материальной точки.
Потенциалом
поля тяготения
в данной точке поля называется скалярная
величина, равная отношению потенциальной
энергии материальной точки, помещенной
в рассматриваемую точку поля, к массе
материальной точки.
![]()
![]()
![]() Геометрическое
место точек, обладающих одинаковым
потенциалом, называют эквипотенциальной
поверхностью. Силовые
линии
в данной точке всегда перпендикулярны
эквипотенциальным поверхностям.
Силы,
не являющиеся центральными, называют
неконсервативными
силами.
Итак,
работа, совершаемая
консервативными силами при
переходе системы
из
некоторого положения в
нулевое
(которое мы можем выбирать сами),
называется
потенциальной
энергией U
системы в этом положении,
причем энергия системы U
является функцией только ее координат.
Геометрическое
место точек, обладающих одинаковым
потенциалом, называют эквипотенциальной
поверхностью. Силовые
линии
в данной точке всегда перпендикулярны
эквипотенциальным поверхностям.
Силы,
не являющиеся центральными, называют
неконсервативными
силами.
Итак,
работа, совершаемая
консервативными силами при
переходе системы
из
некоторого положения в
нулевое
(которое мы можем выбирать сами),
называется
потенциальной
энергией U
системы в этом положении,
причем энергия системы U
является функцией только ее координат.
№1.7
Полная механическая энергия системы — энергия механического движения и взаимодействия, т.е. равна сумме кинетической и потенциальной энергий. Закон сохранения механической энергии: в системе тел, между которыми действуют только консервативные силы полная механическая энергия сохраняется, т.е. не изменяется со временем. Это —фундаментальный закон природы. Он является следствием однородности времени — инвариантности физических законов относительно выбора начала отсчета времени. Все силы в механике принято разделять на консервативные и неконсервативные. Консервативными называются силы, работа которых не зависит от формы траектории (пути) между двумя точками, а зависит только от начального и конечного положений тела относительно другого. Иначе говоря, работа консервативных сил по замкнутой траектории равна нулю. Примером консервативных сил являются сила тяжести, сила упругости и т.д. К ним, прежде всего, относятся диссипативные силы (преобразующие механическую энергию в другие виды энергии), например, сила трения. Если есть изменение, то равна работе диссипативных сил. Финитное – движение точек в ограниченной области пространства. Инфинитное – тело уходит на бесконечность. Абсолютно упругий удар — столкновение двух тел, в результате которого в обоих взаимодействующих телах не остается никаких деформаций и вся кинетическая энергия, которой обладали тела до удара, после удара снова превращается в кинетическую энергию. законы сохранения импульса и сохранения механической энергии выполняются. Абсолютно неупругий удар — столкновение двух тел, в результате которого тела объединяются, двигаясь дальше как единое тело. Не выполняется закон сохранения механической энергии: вследствие деформации часть кинетической энергии переходит во внутреннюю энергию тел (разогрев).
№1.8
![]()
![]()
![]()
![]() Потенциалом
поля тяготения
в данной точке поля называется скалярная
величина, равная отношению потенциальной
энергии материальной точки, помещенной
в рассматриваемую точку поля, к массе
материальной точки.
Потенциалом
поля тяготения
в данной точке поля называется скалярная
величина, равная отношению потенциальной
энергии материальной точки, помещенной
в рассматриваемую точку поля, к массе
материальной точки.
![]()
![]()
![]()
![]()
![]()
сила тяжести, то есть сила притяжения тел к Земле. Обозначим массу Земли М, ее радиус R, массу данного тела m, тогда сила, действующая на тело вблизи поверхности Земли, согласно закону всемирного тяготения будет равна:
![]()
Это и есть сила тяжести. Направлена она к центру Земли. Если на тело действует только эта сила (а все другие уравновешены), то оно совершает свободное падение. Ускорение этого свободного падения можно найти, применив второй закон Ньютона,
![]()
Отсюда видно, что ускорение свободного падения g не зависит от массы m тела и, следовательно, оно одинаково для всех тел. Теперь можно написать, что сила тяжести
![]()
Сила тяжести, действующая на тело, равна произведению массы тела на ускорение свободного падения
Напряжённость гравитацио́нного по́ля — векторная величина, характеризующая гравитационное поле в данной точке и численно равная отношению силы тяготения, действующей на тело, помещённое в данную точку поля, к гравитационной массе этого тела:
![]()
Движение частицы в гравитационном поле в классической механике определяется функцией Лагранжа, имеющей в инерциальной системе отсчета вид:
![]() ,
где:
— масса частицы,
,
где:
— масса частицы, ![]() — координата частицы,
— координата частицы, ![]() —
потенциал гравитационного
поля.
—
потенциал гравитационного
поля.
Подставляя выражение для лагранжиана L в уравнения Лагранжа:
![]() ,
,
получаем уравнения движения
![]() .
.
Невесомость — это состояние тела, при котором оно движется только под действием силы тяжести. Кеплер: 1). Все планеты солнечной системы движутся по эллипсам вокруг солнца, в 1-ом из фокусов которого находится солнце. 2).При движении планеты в поле солнца – секториальная скорость остаётся неизменной. 3). Квадраты периодов обращения планет относятся как кубы больших полуосей их орбит. Чёрная дыра – тело для которого 1-ая космическая скорость равна или больше скорости света.
Гравитацио́нный ра́диус (или ра́диус Шва́рцшильда) представляет собой характерный радиус, определённый для любого физического тела, обладающего массой: это радиус сферы в яркостных координатах, на которой находился бы горизонт событий, создаваемый этой массой в общей теории относительности, если бы она была распределена сферически-симметрично, была бы неподвижной (в частности, не вращалась, но радиальные движения допустимы), и целиком лежала бы внутри этой сферы.
Космическая скорость (первая v1, вторая v2, третья v3 и четвёртая v4) — это минимальная скорость, при которой какое-либо тело в свободном движении с поверхности небесного тела сможет:
v1 (круговая скорость) — стать спутником небесного тела (то есть вращаться по круговой орбите вокруг НТ на нулевой или пренебрежимо малой высоте относительно поверхности);
v2 (параболическая скорость, скорость убегания) — преодолеть гравитационное притяжение небесного тела и уйти на бесконечность;
v3 — покинуть звёздную систему, преодолев притяжение звезды;
v4 — покинуть галактику.
Вторая
космическая скорость в ![]() раза
больше первой.
раза
больше первой.
№1.9
Абсолютно твердое тело — деформацией которого в условиях данной задачи можно пренебречь и расстояние между любыми двумя точками этого тела остается постоянным. Количество независимых величин, которые необходимо задать, чтобы определить положение тела в пространстве, называется числом степеней свободы тела. Для определения положения в пространстве материальной точки нужно задать три координаты (x, у, z) число степеней свободы равно трем. Две материальные точки (N=2), связанные между собой (n=1) имеют 5 степеней свободы 3+3 – 1 или 3N-n В общем случае для твердого тела 6 степеней свободы 3+3+3-3=6. Если тело состоит из 3-х точек (x1,y1,z1), (x2,y2,z2), (x3,y3,z3). Поступательное движение- это такое движение при котором любой отрезок при движении остается параллельным самому себе. Вращательное – вид механического движения. При вращательном движении абсолютно твёрдого тела его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной. Например, в системе отсчёта, связанной с Землёй, ось вращения роторагенератора на электростанции неподвижна. по окружности.
№1.10
Кинетическая энергия вращательного движения — энергия тела, связанная с его вращением.
Основные
кинематические характеристики
вращательного движения тела —
его угловая
скорость (![]() )
и угловое
ускорение.
Основные динамические характеристики
вращательного движения — момент
импульса относительно
оси вращения z:
)
и угловое
ускорение.
Основные динамические характеристики
вращательного движения — момент
импульса относительно
оси вращения z:
![]()
и кинетическая энергия
![]()
![]()
![]()
![]()
![]() Моментом
инерции материальной точки
относительно оси вращения называется
произведение массы этой точки на квадрат
кратчайшего расстояния от оси.
Моментом
инерции материальной точки
относительно оси вращения называется
произведение массы этой точки на квадрат
кратчайшего расстояния от оси.
![]() Моментом
инерции системы (тела)
относительно
оси вращения называется
физическая величина, равная сумме
произведений масс n
материальных
точек системы на квадраты их расстояний
до рассматриваемой оси.
Моментом
инерции системы (тела)
относительно
оси вращения называется
физическая величина, равная сумме
произведений масс n
материальных
точек системы на квадраты их расстояний
до рассматриваемой оси.
![]()
![]() Главный
момент инерции —
момент инерции относительно главной
оси вращения проходящей
через центр масс.
Главный
момент инерции —
момент инерции относительно главной
оси вращения проходящей
через центр масс.
Т![]()
![]() еорема:
Момент инерции тела Jz
относительно произвольной оси z
равен сумме момента его инерции JC
относительно параллельной оси, проходящей
через центр масс C
тела, и произведения массы m
тела на квадрат расстояния a
между осями.
еорема:
Момент инерции тела Jz
относительно произвольной оси z
равен сумме момента его инерции JC
относительно параллельной оси, проходящей
через центр масс C
тела, и произведения массы m
тела на квадрат расстояния a
между осями.
![]() Абсолютно
твердое тело
вращается около неподвижной оси z
проходящей через него. Все точки движутся
с одинаковой угловой скоростью ω
= const
. Кинетическая энергия тела. Мерой
инертности
при вращательном движении служит момент
инерции тела.
Абсолютно
твердое тело
вращается около неподвижной оси z
проходящей через него. Все точки движутся
с одинаковой угловой скоростью ω
= const
. Кинетическая энергия тела. Мерой
инертности
при вращательном движении служит момент
инерции тела.
![]() Диск:
Шар:
Кольцо:
Диск:
Шар:
Кольцо:
![]()
№1.11
Д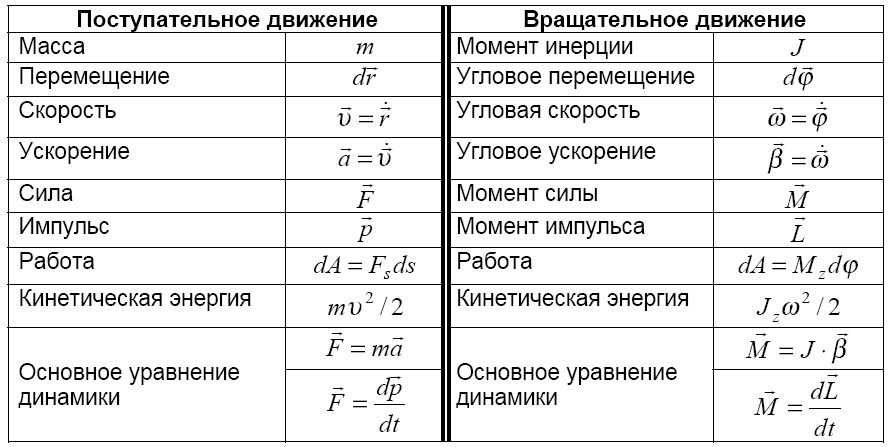
![]() ля
тела любой формы существует три взаимно
перпендикулярные, проходящие через
центр инерции тела оси, которые могут
служить свободными осями. Такие оси
называются главными
осями инерции.
ля
тела любой формы существует три взаимно
перпендикулярные, проходящие через
центр инерции тела оси, которые могут
служить свободными осями. Такие оси
называются главными
осями инерции.
![]()
![]()
![]()
![]()
Моменты инерции относительно главных осей называются главными моментами инерции тела. В каждый момент времени вращение тела, закрепленного в одной точке, можно рассматривать как вращение тела вокруг мгновенной оси, которая изменяет свое положение и в теле, и в пространстве, но всегда проходит через закрепленную точку и совпадает по направлению с вектором угловой скорости. Вращательное движение тела в отсутствии внешних сил называется свободным вращением. В этом случае сохраняется кинетическая энергия, а в отсутствие внешних моментов сил направление и модуль момента импульса. Закон сохранения момента импульса: в замкнутой системе момент импульса системы тел всегда сохраняется постоянным.
Работа вращающего момента равна произведению момента на угол поворота.
Определим мощность при вращательном движении
![]()
Мощность при вращательном движении тела равна произведению вращающего момента (момента пары) на угловую скорость.
Подставив
в выражение мощности значение угловой
скорости, выраженной через частоту
вращения (об/мин) ![]() получим
получим
![]()
откуда
![]()
При данной мощности двигателя максимальный вращающий момент, который двигатель способен развить, можно изменить путем варьирования частоты вращения. Уменьшая частоту вращения, увеличивают вращающий момент и, наоборот, увеличивая частоту вращения, вращающий момент уменьшают.
Аналогия между вращетельным и поступательным движение.Между поступательным и вращательным движениями существует аналогия, которая позволяет легко запоминать формулы, относящиеся к вращательному движению.
Основные характеристики поступательного движения: путь S, скорость v, ускорение а и время t. При вращении им соответствуют: угол поворота φ, угловая скорость со, угловое ускорение ε и время t.
Пусть нам нужно написать уравнение равномерного вращательного движения. Вспоминаем формулу S=vt, справедливую для равномерного поступательного движения, и по аналогии пишем уравнение равномерного вращательного движения: φ=ωt. Для равномерного ускоренного (или замедленного) вращения справедливы формулы: угол поворота φ= ω0t±at2/2 и угловая скорость ω=ω0±εt (по аналогии с S=v0t±at2/2 и v=v0±at). В этих формулах знак "плюс" относится к случаю равномерно ускоренного движения, знак "минус" - равномерно замедленного.
Эта аналогия справедлива не только в кинематике, но распространяется и на динамику. Роль массы т при вращении играет момент инерции I, а роль силы F - момент силы L. Основное уравнение динамики вращательного движения Iε=L записывается по аналогии с ma=F, кинетическая энергия вращения Iω2/2 по аналогии с mv2/2 и т. д.
Гироскопы – массивные однородны тела, вращающиеся с большой угловой скоростью около своей оси симметрии, являющейся свободной осью.
№![]() 1.12
1.12
Общие свойства жидкостей и газов.
Молекулы газа, совершая беспорядочное, хаотическое движение, не связаны или весьма слабо связаны силами взаимодействия, поэтому они движутся свободно и в результате соударений стремятся разлететься во все стороны, заполняя весь предоставленный им объем, т. е. объем газа, определяется объемом того сосуда, который газ занимает.
Как и газ, жидкость принимает форму того сосуда, в который она заключена. Но в жидкостях в отличие от газов среднее расстояние между молекулами остается практически постоянным, поэтому жидкость обладает практически неизменным объемом.
Свойства:
единое
тело, идеальные, несжимаемые. Ф![]() изическая
модель несжимаемой
жидкости
– плотность которой всюду одинакова и
не меняется со временем. На каждый
элемент поверхности ∆S
тела,
помещенного в жидкость, со стороны
молекул жидкости действует сила ∆F
направленная
перпендикулярно поверхности. Давлением
жидкости
называется
физическая величина, определяемая
нормальной силой, действующей со стороны
жидкости на единицу площади. Жидкость
несжимаема,
и ее плотность не зависит от давления.
Тогда при поперечном сечении S
столба
жидкости, его высоте h
и
плотности ρ
вес P
= ρgSh,
а давление на нижнее основание изменяется
линейно
с
высотой давление ρgh
называется гидростатическим.
Закон
Паскаля:
Давление в любом месте покоящейся
жидкости одинаково по всем направлениям,
причем давление одинаково передается
по всему объему, занятому покоящейся
жидкостью. Закон
Архимеда:
на тело, погруженное в жидкость или газ,
действует со стороны этой жидкости
(газа) направленная вверх выталкивающая
сила, равная весу вытесненной телом
жидкости (газа) - ρ — плотность жидкости,
V — объем погруженного в жидкость тела.
изическая
модель несжимаемой
жидкости
– плотность которой всюду одинакова и
не меняется со временем. На каждый
элемент поверхности ∆S
тела,
помещенного в жидкость, со стороны
молекул жидкости действует сила ∆F
направленная
перпендикулярно поверхности. Давлением
жидкости
называется
физическая величина, определяемая
нормальной силой, действующей со стороны
жидкости на единицу площади. Жидкость
несжимаема,
и ее плотность не зависит от давления.
Тогда при поперечном сечении S
столба
жидкости, его высоте h
и
плотности ρ
вес P
= ρgSh,
а давление на нижнее основание изменяется
линейно
с
высотой давление ρgh
называется гидростатическим.
Закон
Паскаля:
Давление в любом месте покоящейся
жидкости одинаково по всем направлениям,
причем давление одинаково передается
по всему объему, занятому покоящейся
жидкостью. Закон
Архимеда:
на тело, погруженное в жидкость или газ,
действует со стороны этой жидкости
(газа) направленная вверх выталкивающая
сила, равная весу вытесненной телом
жидкости (газа) - ρ — плотность жидкости,
V — объем погруженного в жидкость тела.
![]() Идеальной
жидкостью называется
воображаемая жидкость, в которой
отсутствуют силы внутреннего трения.
Вязкость
—
это свойство реальных жидкостей оказывать
сопротивление перемещению одной части
жидкости относительно другой.
Идеальной
жидкостью называется
воображаемая жидкость, в которой
отсутствуют силы внутреннего трения.
Вязкость
—
это свойство реальных жидкостей оказывать
сопротивление перемещению одной части
жидкости относительно другой.
![]()
![]()
![]()
![]()
№![]() 1.13
1.13![]()
![]()
![]() Вязкость
—
это свойство реальных жидкостей оказывать
сопротивление перемещению одной части
жидкости относительно другой. При
перемещении одних слоев реальной
жидкости относительно
других возникают силы
внутреннего
трения,
направленные по касательной
к
поверхности слоев. Градиент
скорости ∆v/∆x
показывает, как быстро меняется скорость
при переходе от слоя к слою в направлении
x
перпендикулярном
направлению движения слоев. Сила
внутреннего трения пропорциональна
градиенту скорости и рассматриваемой
площади поверхности слоя S.
Коэффициент пропорциональности η,
зависящий от природы жидкости и
температуры, называется динамической
вязкостью (или
просто вязкостью).
Течение называется ламинарным
(слоистым),
если вдоль потока каждый выделенный
тонкий слой скользит относительно
соседних, не
перемешиваясь с
ними. Течение называется турбулентным
(вихревым),
если частицы жидкости переходят
из
слоя в слой (имеют составляющие скоростей,
перпендикулярные течению). Количественно
переход от одного режима течения к
другому характеризуется числом
Рейнольдса: γ
= η
/
ρ—
кинематическая
вязкость;
ρ
— плотность жидкости; v
— средняя по сечению трубы скорость
жидкости; d
—
характерный линейный размер, например
диаметр трубы. При Re
≤ 1000
наблюдается ламинарное течение, переход
от ламинарного течения
к турбулентному
происходит
в области 1000
≤ Re ≤ 2000,
а при Re=2300
(для гладких труб) течение — турбулентное.
Метод
Стокса основан
на измерении скорости медленно движущихся
в жидкости небольших тел сферической
формы. На шарик, плотностью ρ и радиусом
r
,
падающий в жидкости вязкостью η и
плотностью ρ′ вертикально вниз со
скоростью v,
действуют три силы: сила тяжести, сила
Архимеда и сила сопротивления.
Вязкость
—
это свойство реальных жидкостей оказывать
сопротивление перемещению одной части
жидкости относительно другой. При
перемещении одних слоев реальной
жидкости относительно
других возникают силы
внутреннего
трения,
направленные по касательной
к
поверхности слоев. Градиент
скорости ∆v/∆x
показывает, как быстро меняется скорость
при переходе от слоя к слою в направлении
x
перпендикулярном
направлению движения слоев. Сила
внутреннего трения пропорциональна
градиенту скорости и рассматриваемой
площади поверхности слоя S.
Коэффициент пропорциональности η,
зависящий от природы жидкости и
температуры, называется динамической
вязкостью (или
просто вязкостью).
Течение называется ламинарным
(слоистым),
если вдоль потока каждый выделенный
тонкий слой скользит относительно
соседних, не
перемешиваясь с
ними. Течение называется турбулентным
(вихревым),
если частицы жидкости переходят
из
слоя в слой (имеют составляющие скоростей,
перпендикулярные течению). Количественно
переход от одного режима течения к
другому характеризуется числом
Рейнольдса: γ
= η
/
ρ—
кинематическая
вязкость;
ρ
— плотность жидкости; v
— средняя по сечению трубы скорость
жидкости; d
—
характерный линейный размер, например
диаметр трубы. При Re
≤ 1000
наблюдается ламинарное течение, переход
от ламинарного течения
к турбулентному
происходит
в области 1000
≤ Re ≤ 2000,
а при Re=2300
(для гладких труб) течение — турбулентное.
Метод
Стокса основан
на измерении скорости медленно движущихся
в жидкости небольших тел сферической
формы. На шарик, плотностью ρ и радиусом
r
,
падающий в жидкости вязкостью η и
плотностью ρ′ вертикально вниз со
скоростью v,
действуют три силы: сила тяжести, сила
Архимеда и сила сопротивления.
![]() Метод
Пуазейля. Этот
метод основан на ламинарном течении
жидкости в тонком капилляре. Рассмотрим
капилляр радиусом R
и
длиной l
.
В жидкости мысленно выделим цилиндрический
слой радиусом r
и
толщиной dr.
Метод
Пуазейля. Этот
метод основан на ламинарном течении
жидкости в тонком капилляре. Рассмотрим
капилляр радиусом R
и
длиной l
.
В жидкости мысленно выделим цилиндрический
слой радиусом r
и
толщиной dr.
![]() Графически
движение жидкостей изображается с
помощью линий
тока,
которые проводятся так, что касательные
к ним совпадают по направлению с вектором
скорости жидкости в данный момент
времени.
Графически
движение жидкостей изображается с
помощью линий
тока,
которые проводятся так, что касательные
к ним совпадают по направлению с вектором
скорости жидкости в данный момент
времени.
№1.14
Д![]()
![]() еформация
—
это изменение формы и размеров твердых
тел под действием внешних сил. Деформация
называется упругой,
если после прекращения действия внешних
сил тело принимает первоначальные
размеры и форму. Пластическая
деформация
— это деформация, которая сохраняется
в теле после прекращения действия
внешних сил.
еформация
—
это изменение формы и размеров твердых
тел под действием внешних сил. Деформация
называется упругой,
если после прекращения действия внешних
сил тело принимает первоначальные
размеры и форму. Пластическая
деформация
— это деформация, которая сохраняется
в теле после прекращения действия
внешних сил.
![]() Относительная
деформация
Относительная
деформация![]() продольная деформация
продольная деформация![]() поперечная
деформация
поперечная
деформация![]()
![]() Закон
Гука: При
малых деформациях относительная
деформация ε пропорциональна напряжению
σ. Закон
Гука:
удлинение стержня при упругой деформации
пропорционально действующей на стержень
силе.
Закон
Гука: При
малых деформациях относительная
деформация ε пропорциональна напряжению
σ. Закон
Гука:
удлинение стержня при упругой деформации
пропорционально действующей на стержень
силе.
![]()
![]()
напряжение — мера внутренних сил, возникающих в деформируемом теле под влиянием внешних воздействий.
Модуль Юнга (модуль упругости) — коэффициент, характеризующий сопротивление материала к растяжению/сжатию при упругой деформации. Назван в честь английского физика XIX века Томаса Юнга. В динамических задачах механики модуль Юнга рассматривается в более общем смысле — как функционал среды и процесса.
Модуль Юнга рассчитывается следующим образом:
![]()
где:
E — модуль упругости, измеряемый в паскалях
F — сила в ньютонах,
S — площадь поверхности, по которой распределено действие силы,
l — длина деформируемого стержня,
x — модуль изменения длины стержня в результате упругой деформации (измеренного в тех же единицах, что и длина l).
Через модуль Юнга вычисляется скорость распространения звука в веществе:
![]()
где ![]() — плотность вещества.
— плотность вещества.
В материаловедении модулем сдвига (обозначается буквой G или μ), называется отношение касательного напряжения к сдвиговой деформации
![]()
где
![]() —
касательное
напряжение;
—
касательное
напряжение;
![]() —
действующая
сила;
—
действующая
сила;
![]() —
площадь,
на которую действует сила;
—
площадь,
на которую действует сила;
![]() —
сдвиговая
деформация;
—
сдвиговая
деформация;
![]() —
смещение;
—
смещение;
![]() —
начальная
длина.
—
начальная
длина.
Предел упругости — максимальная величина механического напряжения, при которой деформация данного материала остаётся упругой, то есть полностью исчезает после снятия нагрузки.
предел прочности — величина предельных напряжений, полученная расчётным путём исходя из свойств межатомных связей в кристаллической решётке материала.
№1.15
Неинерциальная
система отсчёта
— любая система
отсчёта,
которая движется прямолинейно с
постоянным ускорением относительно
инерциальной. Сила
инерции —
фиктивная
сила,
которую можно ввести в неинерциальной
системе отсчёта
так, чтобы законы механики
в ней совпадали с законами инерциальных
систем.
![]()
Сила инерции (также инерционная сила) — термин, широко применяемый в различных значениях в точных науках, а также в философии, истории, публицистике и художественной литературе.
В точных науках сила инерции обычно представляет собой понятие, привлекаемое в целях удобства при рассмотрении движения материальных тел в неинерциальной системе отсчёта[1]. Частными случаями такой силы инерции являются центробежная сила и сила Кориолиса. Кроме того, силу инерции применяют для формальной возможности записывать уравнения динамики как более простые уравнения статики
Невесомость
—
это состояние тела, при котором оно
движется только под действием силы
тяжести. Силы
гравитационного взаимодействия
пропорциональны гравитационной массе
тела, силы инерции же пропорциональны
инертной массе тела. Если инертная и
гравитационная массы равны, то невозможно
отличить какая сила действует на данное
тело — гравитационная или сила инерции.
Эйнштейн:
Все явления в гравитационном поле
происходят точно так же как в соответствующем
поле сил инерции, если совпадают
напряжённости этих полей и одинаковы
начальные условия для тел системы.
![]()
Принцип эквивалентности сил гравитации и инерции — эвристический принцип, использованный Альбертом Эйнштейном при выводе общей теории относительности. Один из вариантов его изложения: «Силы гравитационного взаимодействия пропорциональны гравитационной массе тела, силы инерции же пропорциональны инертной массе тела. Если инертная и гравитационная массы равны, то невозможно отличить, какая сила действует на данное тело — гравитационная или сила инерции.»
Сила
Кориолиса
возникает, если тело
движется
относительно неинерциальной вращающейся
системы отсчета. Вектор Fкор
перпендикулярен к вектору скорости
Vотн
и вектору угловой скорости w.
![]()
Центробе́жная си́ла[1] — сила инерции, которую вводят во вращающейся (неинерциальной) системе отсчёта[2] и которая направлена от оси, вокруг которой происходит вращение тела — или — в более общем случае — от центра вращения
1.16
Принцип
относительности Галилея: законы
динамики одинаковы во всех инерциальных
системах отсчета.
Преобразования Галилея:
в классической механике, при скоростях
тел значительно меньших, чем скорость
света (c << υ) , справедлив механический
принцип относительности.
![]()
![]()
![]() Основные
постулаты и противоречия: 1Физическое
пространство однородно и изотропно.
Пространство и время существуют сами
по себе и независимо от материальных
тел(При затмении Солнца наблюдалось
отклонение солнечных лучей от
прямолинейного распространения (кривизна
пространства)). 2Все
механически явления протекают одинаково
в любой инерциальной системе отсчета.
3Взаимодействие
между физическим объектами происходит
мгновенно (скорость бесконечно большая)(
Скорость
света не зависит от системы координат
и является предельной). 4Масса
материальной точки не зависит от скорости
движения(Масса частиц зависит от
скорости). 5Все
кинематические характеристики можно
измерить сколь угодно точно(Выполняются
соотношения неопределенностей).
Постулаты:
1Все
физические явления во все инерциальных
системах отсчёта описываются одинаковыми
закономерностями. 2Скорость
света во всех инерциальных системах
отсчёта одинакова. Преобразования
Лоренца (релятивистские
преобразования)
устанавливают взаимосвязь пространства
и времени — в закон преобразования
координат входит время, а в закон
преобразования времени — пространственные
координаты. Длительность
события,
происходящего в некоторой точке,
наименьшая в той инерциальной системе
отсчета, относительно которой эта точка
неподвижна. Следовательно, часы,
движущиеся относительно инерциальной
системы отсчета, идут медленнее покоящихся
часов.
Основные
постулаты и противоречия: 1Физическое
пространство однородно и изотропно.
Пространство и время существуют сами
по себе и независимо от материальных
тел(При затмении Солнца наблюдалось
отклонение солнечных лучей от
прямолинейного распространения (кривизна
пространства)). 2Все
механически явления протекают одинаково
в любой инерциальной системе отсчета.
3Взаимодействие
между физическим объектами происходит
мгновенно (скорость бесконечно большая)(
Скорость
света не зависит от системы координат
и является предельной). 4Масса
материальной точки не зависит от скорости
движения(Масса частиц зависит от
скорости). 5Все
кинематические характеристики можно
измерить сколь угодно точно(Выполняются
соотношения неопределенностей).
Постулаты:
1Все
физические явления во все инерциальных
системах отсчёта описываются одинаковыми
закономерностями. 2Скорость
света во всех инерциальных системах
отсчёта одинакова. Преобразования
Лоренца (релятивистские
преобразования)
устанавливают взаимосвязь пространства
и времени — в закон преобразования
координат входит время, а в закон
преобразования времени — пространственные
координаты. Длительность
события,
происходящего в некоторой точке,
наименьшая в той инерциальной системе
отсчета, относительно которой эта точка
неподвижна. Следовательно, часы,
движущиеся относительно инерциальной
системы отсчета, идут медленнее покоящихся
часов.
![]()
![]()
Р![]()
![]() азмер
тела, движущегося относительно
инерциальной системы отсчета, уменьшается
в направлении движения, причем лоренцово
сокращение
длины
тем
больше, чем больше скорость движения.
Поперечные размеры тел не зависят от
скорости его движения и одинаковы во
всех инерциальных системах отсчета.
Если материальная точка движется в
системе O′
вдоль оси x′
со скоростью υ′
, а сама система O′
движется со скоростью u
относительно
системы O,
то релятивистский
закон сложения скоростей:
азмер
тела, движущегося относительно
инерциальной системы отсчета, уменьшается
в направлении движения, причем лоренцово
сокращение
длины
тем
больше, чем больше скорость движения.
Поперечные размеры тел не зависят от
скорости его движения и одинаковы во
всех инерциальных системах отсчета.
Если материальная точка движется в
системе O′
вдоль оси x′
со скоростью υ′
, а сама система O′
движется со скоростью u
относительно
системы O,
то релятивистский
закон сложения скоростей:
№1.17![]()
![]()
![]()
![]()
Релятивистский импульс p. Релятивистский импульс системы сохраняется. Закон сохранения релятивистского импульса — следствие однородности пространства. . Релятивистская масса m движущихся релятивистских частиц (тел) зависит от их скорости. m0 — масса покоя частицы, т.е. масса, измеренная в той инерциальной системе отсчета, в которой частица находится в покое. Основной закон релятивистской динамики: Законы классической динамики получаются из законов релятивистской динамики в предельном случае υ << c. Полная энергия тела массы m:
Соотношение носит универсальный характер, оно применимо ко всем формам энергии, т.е.можно утверждать, что с энергией, какой бы формы она не была, связана масса и, наоборот, со всякой массой связана энергия. Покоящееся тело обладает энергией покоя. Полная энергия замкнутой системы сохраняется. Закон сохранения энергии — следствие однородности времени. Кинетическая энергия: Релятивистское соотношение между полной энергией и импульсом тела: В случае, когда масса покоя частицы равна нулю:
![]()
![]()