

АД с управлением по напряжению.
Описание схемы
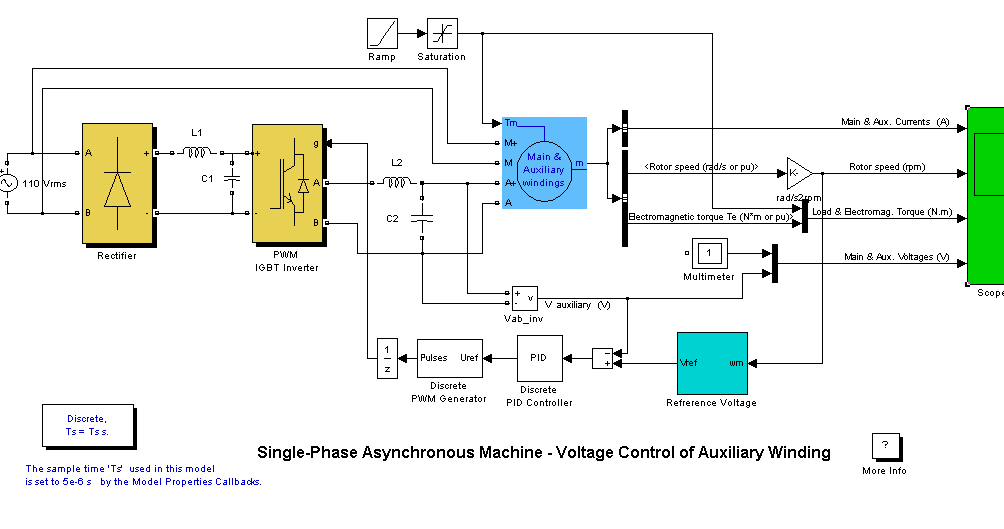
В качестве объекта выступает вал намоточного станка. Основной обмотки двигателя напрямую связана с 110-V источником напряжения. H-мост IGBT инвертора подключен к выпрямителю. Опорное значение амплитуды и фазы напряжения, приложенного к катушке вычисляются по блоку опорного напряжения. Закон управления реализуется с помощью ПИД блока.
Демонстрация
Начало моделирования. Машина начинает на холостом ходу и при Т = 1,0 сек после того, как машина достигла своего стационарного состояния, нагрузки крутящий момент увеличился до ее номинальной значения (1 нм) в 0,5 сек.Заметим, что крутящий момент не имеет перерегулирования. Также обратите внимание вспомогательных и обмотки токов. Эти токи в квадратуре и их величины отношение равно отношению N, количества витков в вспомогательной и основной обмотки.
Уставки ПИД регулятора.

Переходные процессы.

Расчет недостающих параметров ведется исходя из необходимости построения механических характеристик (естественной и искусственной ), а также для построения структурной схемы электропривода.
Т.о. необходимо найти зависимость скорости двигателя от приложенного к нему момента. Для короткозамкнутых асинхронных двигателей в области скольжений 1≥s>sк
 ;
;
 ;
;
где λп, λт – соответственно кратности пускового и максимального моментов;
Mk – критический момент двигателя;
sk – критическое скольжение;
s – скольжение.
Из этих формул видно, что весь расчет для построения естественной механической характеристики сводиться к нахождению sk. Для этого можно представить критическое скольжение в виде:
![]() ;
;

где sном – номинальное скольжение двигателя, которое можно рассчитать по следующей формуле:
![]() .
.
![]() ;
;
![]() ;
;
где ω0, ωном – соответственно синхронная и номинальная угловые скорости двигателя, рад/с;
n – скорость двигателя, об/мин;
n0 – синхронная скорость двигателя, об/мин.
Тогда
![]() ;
;
![]() ;
;
 .
.
Т.о. естественная механическая характеристика будет описываться следующими двумя уравнениями:
 ;
;
![]() .
.
На основании этих уравнений строим характеристику двигателя:

Рис.4.1. Естественная механическая характеристика двигателя.
Но кроме построения естественной механической характеристики нам необходимо построить характеристики для частотного управления скоростью.
Характеристики же, которые будут лежать ниже рабочей, будут являться переходными, т.е. описывающими процесс плавного пуска (торможения) двигателя.
Для того чтобы построить эти характеристики необходимо привести полученную систему из двух уравнений к такому виду, при котором механическая характеристика будет менять свой вид при изменении частоты питающего двигатель напряжения.
Существует ряд способов частотного регулирования. Для нашего электропривода наиболее приемлемым видится способ по закону Фmax=const, где Фmax–максимальный магнитный поток в статоре. При этом законе регулирования значения критического момента и критического скольжения будут постоянными. Здесь будет наблюдаться эффект сдвига оси абсцисс в зависимости от величины частоты относительно оси ординат. Поэтому на основании этого систему описывающую механические характеристики при частотном управлении можно представить в следующем виде:
 ;
;
![]() ;
;
где ωном – номинальная скорость двигателя;
sai – абсолютное скольжение, которое можно выразить следующим образом:
![]() ;
;
ν – относительная скорость:
![]() ;
;
α – относительная частота:
![]() ;
;
fном и f – номинальная (50Гц) и заданная частоты питающего двигатель напряжения.
На основании полученной системы уравнений построим механические характеристики при следующих частотах: 49,938Гц, 44,125Гц, 38,43Гц и номинальной 50Гц.

Рис.4.2. Механические характеристики при различных частотах питающего двигатель напряжения.
Необходимо отметить то, что торможение электропривода будет осуществляться методом динамического торможения, его характеристика будет иметь вид:

Рис.4.3. Механические характеристики динамического торможения двигателем.
Реализовать схему динамического торможения можно следующим образом:

Рис.4.4. Схема динамического торможения асинхронного двигателя.
Найдем теперь параметры необходимые для построения структурной схемы, а также те параметры, которые понадобятся для ее анализа.
Рассчитаем номинальный ток двигателя:
 .
.
Полное сопротивление короткого замыкания, Ом:

![]() ;
;
где
![]() ;
;
nо – скорость идеального холостого хода, об/мин.
![]()
Активное сопротивление фазы статора:
![]() ;
;
где cosφпуск – коэффициент мощности при пуске:
 ;
;
где γ1 – отношение мощности потерь мощности в обмотке статора при номинальной нагрузке к полным номинальным потерям, определяемое по формуле:
![]()
Откуда

![]()
Индуктивное сопротивление короткого замыкания, Ом:
![]() .
.
Индуктивные сопротивления рассеяния статора и ротора примерно равны:
![]() .
.
Ток холостого хода короткозамкнутого асинхронного двигателя :

Приведенный ток ротора:
 .
.
ΔР0 – потери мощности при холостом ходе, Вт:
![]()
Коэффициент мощности при холостом ходе двигателя:
![]() .
.
Индуктивное сопротивление намагничивающего контура:
![]() .
.
Активное сопротивление намагничивающего контура:
![]() .
.
где ∆Рсm – потери в стали статора Вт, определяемые по формуле:
![]() ;
;
![]() .
.
Электромеханическая постоянная времени электропривода:
![]()
где JΣ – суммарный момент инерции электропривода, кг·м²;
Δωном – падение угловой скорости на данной механической характеристике при изменении электромагнитного момента от нуля до Мном.
Электромагнитная постоянная времени АД, с:
![]()
Регулирование скорости асинхронных электродвигателей (ЭД) в широком диапазоне или где диапазон не более 3, возможно путём регулирования напряжения статора, если искусственные характеристики ЭД искусственно смягчены. Наиболее просто это можно выполнить, если в цепь ротора двигателя включить постоянное добавочное сопротивление. Наиболее благоприятным режимом работы таких электроприводов является режим с вентиляционным моментом нагрузки. Преимуществом является то, что схемы электроприводов получаются сравнительно простыми. Принципиальная схема системы управления выглядит следующим образом:

Принципиальная схема системы управления асинхронным электроприводом с воздействием на напряжение статора.
Т.е. следует рассматривать частный случай управления, соответствующий постоянству частоты статора. Принципиальная схема системы управления асинхронным ЭП с возмущающим воздействием на напряжение статора показаны на рис. Регулирование напряжения производится путём сдвига по фазе управляющих импульсов в тиристорах, включаемых по противопараллельной схеме в каждую фазу статора двигателя. Система выполняется двухконтурной. Для статического режима работы асинхронного ЭД можно записать:

где Мкр.н – критический момент при номинальном напряжении статора.
Мн=Кwн2
К=Мн/wн2=19,7/151.32=0,
J=U1α / U1αн – относительные напряжения статора принимаем равными как 1/220=0.0045;
V– относительная частота статора равна 1;
Sкр – абсолютное скольжение электродвигателя в рабочей точке;
Тэл=1/(2πfsкр)=1/(2∙3.14∙50∙0.394)=0.0081 – электромагнитная постоянная времени;
Тм= JΣwн/Мн=(0.023∙152.3)/49.2=0.07128 – электромеханическая постоянная времени;
w0 – угловая скорость статора, рад/с

Структурная схема асинхронного электродвигателя при управлении напряжением статора.
Для построения САУ необходимо рассчитать регулятор скорости, напряжения, атак же датчики обратных связей по скорости и напряжению. Линеаризованные механические характеристики в замкнутой системе описываются следующими уравнениями:
![]()
где w – скорость идеального холостого хода, рад/с;
βз.с. – модуль жесткости механической характеристики в замкнутой системе
![]()
где Км – коэффициент пропорциональности для электромагнитного момента, Нм/А;
Крс – коэффициент усиления регулятора скорости;
Кос – коэффициент обратной связи по скорости;
Крн – коэффициент усиления по напряжению;
Обычно величиной βз.с задаются, исходя из требований, предъявляемых к электроприводу. Выбираем тахогенератор для осуществления обратной связи по скорости, что позволяет рассчитать Кос.
Выбор частного преобразователя для АД.
Основные сведения о частотно-регулируемом электроприводе
Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации. Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток). Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости. Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты. Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации. Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением
неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Mс . При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте:
![]()
Для вентиляторного характера момента нагрузки это состояние имеет вид:

При моменте нагрузки, обратно пропорциональном скорости:

Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.
Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Перспективность частотного регулирования наглядно видна из рисунка 1

Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.
Структура частотного преобразователя Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя. В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
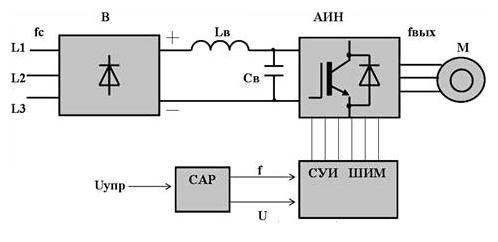
Принцип работы преобразователя частоты Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора , системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв (рис.2). Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.
Широтно-импульсное
управление характеризуется периодом
модуляции, внутри которого обмотка
статора электродвигателя подключается
поочередно к положительному и
отрицательному полюсам выпрямителя.
Длительность этих состояний внутри
периода ШИМ модулируется по синусоидальному
закону. При высоких (обычно 2…15 кГц)
тактовых частотах ШИМ, в обмотках
электродвигателя, вследствие их
фильтрующих свойств, текут синусоидальные
токи.
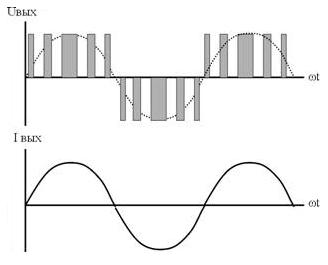
Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 3). Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодули-рована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна. Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const.
Второй
способ получил распространение в
современных преобразователях частоты
благодаря развитию современной элементной
базы (микропроцессоры, IBGT-транзисторы).
При широтно-импульсной модуляции форма
токов в обмотках статора асинхронного
двигателя получается близкой к
синусоидальной благодаря фильтрующим
свойствам самих обмоток.
Такое
управление позволяет получить высокий
КПД преобразователя и эквивалентно
аналоговому управлению с помощью частоты
и амплитуды напряжения.
Современные
инверторы выполняются на основе полностью
управляемых силовых полупроводниковых
приборов – запираемых GTO
– тиристоров, либо биполярных
IGBT-транзисторов
с изолированным затвором. На рис. 2.45
представлена 3-х фазная мостовая схема
автономного инвертора на
IGBT-транзисторах.
Она состоит из входного емкостного
фильтра Cф
и шести IGBT-транзисторов
V1-V6
включенными встречно-параллельно
диодами обратного тока D1-D6.
За счет поочередного переключения
вентилей V1-V6
по алгоритму, заданному системой
управления, постоянное входной напряжение
Uв
преобразуется в переменное
прямоугольно-импульсное выходное
напряжение. Через управляемые ключи
V1-V6
протекает активная составляющая тока
асинхронного электродвигателя, через
диоды D1-D6
– реактивная составляющая тока.

И – трехфазный мостовой инвертор; В – трехфазный мостовой выпрямитель;
Сф – конденсатор фильтра;
Частотные преобразователи: критерии выбора
Преобразователи частоты активно завоевывают рынок, поэтому сейчас крайне актуально "повышение квалификации" инженерно-технического персонала. Автор статьи не ставит перед собой цель изложить тему полностью, однако постарается помочь разработчикам машиностроительного оборудования лучше сориентироваться в вопросах выбора и применения преобразователей в повседневной практике.
Зачем это нужно?
Асинхронный двигатель с короткозамкнутым ротором на сегодняшний день является одним из самых дешевых и надежных и поэтому активно применяется в промышленности. Однако нет в мире ничего идеального, и этот двигатель – не исключение. Недостатков у него два. Во-первых, не удается простым способом регулировать скорость двигателя и, как следствие, производительность механизма. Проблема, конечно, решается: в насосах применяются задвижки, ограничивающие поток жидкости, в вентиляторах – шибера и заслонки, в промышленных механизмах – разного рода редукторы. Однако все эти варианты имеют свои минусы: одни неэкономичны, другие ненадежны, третьи обеспечивают лишь конечный набор скоростей и необходимость остановки механизма для переключения и т.д. Вторая проблема – очень большой пусковой ток (в 5-7 раз превышающий номинальный) и момент, приводящий к ударным механическим нагрузкам при пуске. Соответственно необходимо использование более устойчивой коммутационной аппаратуры и применение тех или иных демпфирующих устройств.
В результате многолетних попыток решить эти проблемы родился прибор, оптимальный по своим функциям и обеспечивающий возможность плавного запуска и непрерывного регулирования скорости электронным способом, по определению являющимся более надежным, чем механический. Прибор более надежным, чем механический. Прибор этот получил название преобразователь частоты.
Что это дает?
Рассмотрим применения частотных преобразователей по степени популярности:
Насосы. Потребляемая насосом мощность пропорциональна кубу скорости вращения, поэтому использование частотного преобразователя дает экономию электроэнергии до 30% и даже больше по сравнению со способом регулирования мощности заслонками на трубе. Эта экономия позволяет окупить частотный преобразователь примерно за год. Попутно решается проблема гидравлических ударов: при работе преобразователя частоты пуск и останов насоса происходят плавно. Современные преобразователи ведущих фирм имеют систему управления, позволяющую управлять группой насосов, то есть практически построить насосную станцию без привлечения дополнительного контроллера.
Вентиляторы. Все, что было сказано для насосов, относится и к вентиляторам. Экономия электроэнергии здесь обычно еще больше, поскольку для обеспечения прямого пуска тяжелых вентиляторов часто применяются двигатели повышенной мощности. При проектировании новых установок можно использовать с преобразователем двигатель м двигатель меньшей мощности, а при модернизации существующих установок дополнительная экономия получается за счет снижения потерь холостого хода.
Транспортеры. Здесь регулирование позволяет адаптировать скорость перемещения к скорости всего технологического процесса, которая в общем случае не является постоянной. Плавный пуск резко увеличивает ресурс механизмов за счет отсутствия ударных нагрузок в процессе выбора люфтов в момент пуска.
Как это работает?
Взгляните на рисунок 1: переменное напряжение сети выпрямляется, сглаживается конденсаторами, а затем из полученного постоянного напряжения выходной генератор формирует напряжение необходимой частоты и амплитуды.

Формирование это схематически показано на рис. 2 и происходит довольно забавно: по существу генератор просто открывает и закрывает нужные выходные ключи, формируя последовательность импульсов различной ширины; результат отнюдь не похож на синусоиду. Однако в работе участвует и двигатель, индуктивность которого приводит к сглаживанию кривой тока, который оказывается пропорциональным среднему значению напряжения (собственно, поэтому от преобразователя частоты без специальных мер нельзя питать другие нагрузки).

По такой силовой схеме собрано подавляющее большинство представленных на рынке преобразователей частоты. Все отличия кроются в функциях системы управления, которые можно разделить на три группы:
управление силовыми ключами выходного генератора;
обеспечение защиты двигателя, сети и самого преобразователя частоты;
система обмена информацией с внешним миром.
Критерии выбора
Раз уж мы заговорили о рынке, то нужно понимать, что задача каждого производителя – продать свое детище. Поэтому из имеющегося набора возможностей он включает в свой прибор только те, за которые, по его мнению, пользователь готов заплатить. Еще некоторое количество функций можно реализовать в виде опций, которые можно добавить при заказе. Здесь появляется первый компромисс: чем больше функций имеется в базовой версии, тем дешевле стоит каждая из них, но тем дороже весь прибор. И наоборот, чем больше функций предлагается в виде опций, тем дешевле базовая версия, но тем дороже каждая возможность и ниже надежность прибора в целом (сказывается наличие разъемов, проводов, усложнение охлаждения и т.п.). Кроме того, количество одновременно подключаемых опций также ограничено. Поэтому стоит выбрать тот прибор, который большинство нужных функций имеет в базовом варианте, а одну-две опции можно заказать дополнительно.
В конце статьи приведена таблица, в которую сведены основные параметры преобразователей частоты, представленных на российском рынке.
Итак, на что стоит обратить внимание при выборе? Как говорится, вот с этого места поподробнее… Во-первых, оговоримся, что выбирать мы будем только из технических соображений; стоит выбрать несколько моделей, отвечающих техническим требованиям, а уже потом из них выбирать ту, что соответствует другим критериям: цене, надежности, срокам поставки, уровню сервиса и т.д.
Сначала следует отбросить те линейки преобразователей, которые явно не подходят, например, из-за отсутствия моделей нужной мощности, из-за открытого исполнения, предназначенного для встраивания, и т.п.
По типу механизма нужно определить способ управления – скалярное или векторное. Большинство современных преобразователей реализуют тот или иной вариант векторного управления двигателем (раздельное управление векторными переменными двигателя – подробнее см. соответствующую литературу); при необходимости эти преобразователи могут работать и в более простом скалярном режиме (поддержание постоянного отношения выходного напряжения к выходной частоте). Этот режим вполне достаточен для несложных приводов – насосов, вентиляторов, конвейеров, транспортеров и т.п., а его преимуществом является возможность управлять более мощными двигателями при использовании тех же силовых элементов.
Нужно отметить, что на рынке почти не осталось моделей, не имеющих векторного управления, поэтому большое значение наличию «ненужного» векторного управления придавать не стоит – его можно будет просто отключить.
Мощностной ряд. Если требуемое количество преобразователей определено, то желательно, чтобы в ряду были модели всех нужных мощностей – так проще обеспечить унификацию в самом широком смысле этого слова – от запчастей и опциональных компонентов до упрощения жизни обслуживающего персонала. Если же процесс перехода на регулируемый привод видимых ограничений не имеет, то желательно выбрать ряд с наиболее широким диапазоном мощностей – соображения те же.
Входное напряжение. Этот параметр определяет, при каком напряжении в сети преобразователь частоты сохраняет работоспособность. Узнайте, какое напряжение может быть в питающей сети (именно какое может быть, а не какое должно быть), и постарайтесь, чтобы преобразователь его пережил. Причем если пониженное напряжение приведет просто к остановке (а у хороших моделей – только к пропорциональному снижению скорости), то увеличение напряжения выше допустимого может привести к выходу прибора из строя.
Диапазон регулирования частоты. Верхний предел важен при использовании двигателей с высокими номинальными частотами 200…1000 Гц.
Обычно это механизмы с очень большими скоростями – шлифовальные машины, центрифуги и т.п.
Убедитесь, что преобразователь может дать ту частоту, на которую рассчитаны двигатель и механизм.
Нижний предел определяет диапазон регулирования скорости; если большой диапазон (больше 1:10) Вам не нужен, то и не обращайте на это внимания. А если нужен, то даже заявленный диапазон частот от 0 Гц не гарантирует устойчивую работу, и этот вопрос нужно прояснять с производителем особо. Кстати, в этом случае, скорее всего, потребуется векторное управление.
Количество входов управления. Дискретные входы нужны для ввода различных команд (пуск, стоп, выбор фиксированной скорости, реверс, аварийное торможение, изменение задания и т.п. – входы обычно программируются пользователем), аналоговые – для ввода сигналов задания и обратной связи (обычно 0-10В или 4-20мА). Цифровые (не путать с дискретными!) входы нужны для ввода высокочастотных сигналов от энкодеров (цифровых датчиков скорости и положения). Большое количество входов нужно тогда, когда планируется построение сложной системы управления со множеством управляющих сигналов. Сказать заранее хватит входов или не хватит сложно, поэтому чем больше входов, тем лучше, но отвергать модель только из-за малого количества входов не стоит.
Количество выходных сигналов. Дискретные выходы также используются для построения сложных систем (например, уже упоминавшихся насосных станций) и для вывода сигналов о различных событиях, а аналоговые – для питания показывающих приборов и опять же для построения систем управления. Рекомендации по выбору – те же, что и для входов.
Управление. Речь в данном случае идет об оперативном управлении, то есть о том, как будет осуществляться управление приводом в рабочем режиме. Может осуществляться через входы управления (см. выше), со встроенного или выносного пульта, а также по шине последовательной связи (от контроллера или компьютера). Часто допустимо комбинированное или переключаемое управление. Выбирайте то, чем будете пользоваться.
Срок гарантии. Косвенно позволяет судить о надежности техники, особенно импортной, поскольку организация сервисной службы в России – дело хлопотное и дорогое. Правда, по опыту автора, в России подавляющее количество выходов преобразователей частоты из строя происходит либо из-за некачественного электроснабжения, либо из-за пресловутого «человеческого фактора»; понятно, что эти случаи под гарантию не подпадают. Тем не менее, более длинный срок гарантии греет душу…
Если нет каких-либо специальных требований, то на этом выбор серии можно считать за-конченным. Теперь нужно выбрать конкретную модель в линейке. Будем исходить из того, что двигатель уже выбран (чаще он уже и установлен). В первом приближении преобразователь подбирается по мощности двигателя: мощность преобразователя должна быть равна или больше мощности ?двигателя. На этом большинство проектировщиков и, к сожалению, большинство поставщиков и останавливаются, поскольку здесь особо думать не надо, и подобрать прибор по единственному параметру сможет каждый. Но не исключены досадные ошибки, приводящие либо к невозможности реализации нужных алгоритмов работы, либо к периодическим ?отказам, либо даже к выходу прибора из строя. Поэтому рассмотрим второе приближение – выбор по токовым характеристикам. Во-первых, номинальный ток преобразователя должен быть больше или равен номинальному току двигателя.
Не измеренному, а именно номинальному, указанному в паспорте или на шильдике! Большинство двигателей приводит в действие насосы и вентиляторы, и для этих применений на этом можно и остановиться, поскольку перегрузки этих приводов минимальны.
Для других приводов пойдем дальше: учтем уровень перегрузок. Преобразователь частоты должен допускать токи перегрузок, допустимые для двигателя и механизма. Здесь уже придется почитать документацию. В описании механизма обычно указываются токи перегрузок и длительность их протекания; если этого нет (плохая документация или ее отсутствие), то можно честно померить ток во всех режимах работы механизма (кроме пуска, здесь разговор особый и выходящий за рамки этой статьи; к счастью, на выбор преобразователя этот режим влияет очень редко). Если уж совсем лень, то по таблицам применений, предоставляемым серьезными поставщиками, можно подобрать аналогичный механизм и узнать его уровень перегрузок. В данных на преобразователь обычно указывается максимальный ток, который может дать преобразователь в течение 1-2 минут. Этот ток должен превышать ток перегрузок механизма, а допустимое время его протекания – время действия перегрузок.
Если для проектируемого привода возможны ударные нагрузки, то необходимо подобрать преобразователь еще и по пиковому току. Преобразователь частоты должен допускать токи пиковых нагрузок, допустимые для двигателя и механизма.
Пиковые нагрузки – это нагрузки, действующие в течение 2-3 секунд, например, ток привода ковша экскаватора, попавшего на камень. Если этот режим не учесть, то привод в этот момент просто остановится – двигатель мог бы справиться с препятствием, но ему для этого буквально на мгновение нужен очень большой ток, а преобразователь его дать не может. Обидно! Сложность выбора заключается еще и в том, что не все преобразователи частоты могут реализовать короткие броски тока выше максимального значения, а если и могут, то не все производители указывают этот параметр. В этом случае необходимо выбирать преобразователь, максимальный ток которого превосходит пиковый ток нагрузки.
Внимание! При выборе преобразователя по токовым характеристикам нужно, чтобы он отвечал всем трем требованиям, а вот мощностными характеристиками можно и пренебречь.
Это далеко не полный перечень функций и характеристик, их сотни (это не шутка!). Однако формат журнальной статьи не позволяет рассмотреть их все. Последний совет, который автор хотел бы дать потенциальному пользователю преобразователя частоты: обратите внимание на сервис!
Технические консультации по «горячей линии», пуско-наладка, обучение персонала, условия, срок и место возможного ремонта и т.д. Если с Вами не хотят обсуждать Ваши проблемы до продажи, то после получения Ваших денег вы рискуете остаться один на один с головной болью, преобразователем частоты и большим количеством желающих Вам помочь… опять за деньги.
Светлое будущее.
Прогнозы, как известно, дело неблагодарное, но все же попытаемся заглянуть в завтрашний день преобразователей частоты.
Во внутреннем устройстве преобразователей основные усилия разработчиков направлены на обеспечение «неубиваемости» приборов, минимизации их влияния на питающую сеть и окружающее оборудование, повышение линейности выходных параметров и создание систем, способных по быстродействию заменить привод постоянного тока.
С точки зрения пользователя, намечается разделение преобразователей частоты на две группы: в первую будут входить приборы, ориентированные на пользователя дилетанта и имеющие минимум пользовательских настроек и максимум автоматических, а во вторую – приборы, имеющие максимальное количество настроек и возможностей и рассчитанные на применение специалистами, способными все эти возможности использовать.
Основные возможности частотных преобразователей ОМРОН. - Частотный преобразователь позволяет регулировать выходную частоту в пределах от 4 до 400 Гц. - Разгон и торможение двигателя осуществляется плавно (по линейному закону), время разгона о торможения можно настраивать в пределах о 0.1 секунды до 30 минут. Возможен плавный реверс двигателя. - При разгоне происходит автоматическое увеличение момента для компенсации инерционной нагрузки. Пусковой момент достигает 150% от номинального. - Частотные преобразователи обеспечивают полную защиту преобразователя и двигателя от перегрузок по току, перегрева, утечки на землю, и обрыва фазы. - Преобразователь позволяет отслеживать и отображать на цифровом пульте основные параметры системы: заданную скорость, выходную частоту, ток и напряжение двигателя, выходную мощность и момент, состояние дискретных входов, общее время работы преобразователя и др. - В соответствии с характером нагрузки можно выбрать подходящую V/f характеристику или создать собственную. - В наиболее совершенных преобразователях реализовано векторное управление. Оно позволяет работать с полным моментом в области нулевых частот, точно поддерживать скорость при переменной нагрузки без датчика обратной связи, точно контролировать момент на валу двигателя. Специальные функции частотных преобразователей ОМРОН. Преобразователи Омрон имеют много специальных функций, которые зачастую отсутствуют у других производителей. ЭНЕРГОСБЕРЕЖЕНИЕ Преобразователь позволяет экономить на непроизводительных затратах энергии, кроме того он имеет функцию энергосбережения. Эта функция позволяет при выполнении той же работы экономить от 5 до 30 % электроэнергии путем поддержания двигателя в режиме оптимального КПД. В режиме энергосбережения преобразователь непрерывно контролирует потребление тока, рассчитывает нагрузку и меняет выходное напряжение. Таким образом, оптимизируется потребление мощности в соответствии с нагрузкой и повышается КПД. ПИД-РЕГУЛЯТОР Преобразователи Омрон имеют встроенный регулятор процесса (ПИД-регулятор). Для работы в этом режиме необходим датчик обратной связи. Преобразователь меняет скорость вращения двигателя таким образом, чтобы поддерживать на заданном уровне определенный параметр (например, давление или температуру). Замкнутая по обратной связи система позволяет точно поддерживать контролируемый параметр вне зависимости от изменения других параметров. ПРЕДОТВРАЩЕНИЕ РЕЗОНАНСА Иногда при работе на определенных частотах в механической системе возникает резонанс. В этом случае преобразователь может обходить резонансную частоту. ПРЕДОТВРАЩЕНИЕ ОПРОКИДЫВАНИЯ Функция предотвращения опрокидывания работает в трех режимах: при разгоне, при торможении и при работе. При разгоне, если задано слишком большое ускорение и не хватает мощности. То преобразователь автоматически продлевает время разгона. При торможении функция работает аналогично. При работе эта функция позволяет в случае перегрузки вместо аварийной остановки продолжать работу на меньшей скорости. ОПРЕДЕЛЕНИЕ СКОРОСТИ Иногда возникают задачи, в которых пуск преобразователя происходит при вращающейся нагрузке. Для предотвращения опрокидывания в этом случае применяется функция поиска скорости. В этом случае преобразователь при пуске определяет скорость вращения нагрузки и начинает регулирование не с нуля, а с этой скорости.
Серия ЧП |
Мощность, кВт |
Способ управления |
Особенности |
Применение |
3G3JV |
0.1-3.7 |
U/f |
простой, недорогой |
вентилятор, насос, конвейер |
3G3MV |
0.1-7.5 |
векторное |
малогабаритный, большая глубина регулирования |
замена старых приводов |
3G3PV |
0.4-300 |
U/f |
недорогой, возможность приема сигналов с термосопротивления |
вентиляция, водоснабжение |
3G3RV |
0.4-160 |
векторное |
возможность приема сигналов с датчиков температуры |
насосы, миксеры, транспортеры большой мощности |
3G3HV |
0.4-300 |
U/f |
повышенная надежность, возможность работы в жестких условиях |
вентиляторы, насосы, транспортные средства |
3G3FV |
0.4-300 |
векторное |
контроль момента, neuro-fuzzy, крановые характеристики |
общепромышленные механизмы, конвейеры, привода намотки и протяжки, подъемники |
3G3GV |
0.4-300 |
векторное |
контроль момента |
подъемники |